当前位置:网站首页>搭建ros交叉编译环境(从x86到nvidia arm)
搭建ros交叉编译环境(从x86到nvidia arm)
2022-08-04 12:50:00 【华为云】
![]()
方法1:
交叉编译环境搭建流程
- 交叉编译环境搭建的主要思路是利用catkin提供的rostoolchain脚本设置相应的交叉编译工具、lib库地址等,中间遇到问题再针对性解决。
基础环境:
- 目标运行环境
- arm64 cpu
- Ubuntu 16.04
- ros kinetic for arm
- 编译环境
- x86_64 cpu
- Ubuntu Kylin(16.04)
- ros kinetic for amd64
环境设置流程:
1 ARM ubuntu环境上安装arm-indigo版本,后面需要将这个arm版本copy到交叉编译环境上
2 x86环境上安装docker(ubuntu)
3 下载docker-ros(ubuntu)镜像, 加载启动docker-ros(ubuntu+ROS)镜像
4 安装 sudo apt-get install g++-arm-linux-gnueabihf
5 将docker环境中中x86版本的indigo替换成arm版本的indigo,
替换之前需要备份x86版本indigo的lib,因为这些库文件在运行ros时是需要的。
将x86版本indigo的lib保存到localpath目录下,设置export LD_LIBRARY_PATH=localpath,
实现运行ros命令时使用x86的lib库。
6 将arm环境下的库文件/头文件 copy到docker环境中,目录可以自己设定比如:/$ENV{HOME}/cross-compiling/ubuntu-rootfs
7 配置rostoolchain.cmake文件
8 修改/opt/ros/indigo/share/catkin/cmake/tools/rt.cmake
9 个人理解cmake交叉编译过程就是修改cmake搜索链接库文件位置的过程,正常编译会搜索x86库文件做在位置,
交叉编译需要将搜索位置切换到目标架构需要的库文件存放位置,比如/$ENV{HOME}/cross-compiling/ubuntu-rootfs
实现方法:
修改catkin_INCLUDE_DIRS catkin_LIBRARY_DIRS,将这两个变量中指向x86系统的位置,修改为指向交叉编译依赖文件存放位置
…详情请参考
边栏推荐
猜你喜欢




随机推荐
Why is Luo Zhenyu's A-share dream so difficult to fulfill?
Control CD-ROM with VbScript
Oracle 19c 单实例 19.3.0 升级到19.11.0 详细教程
分布式链路追踪Jaeger + 微服务Pig在Rainbond上的实践分享
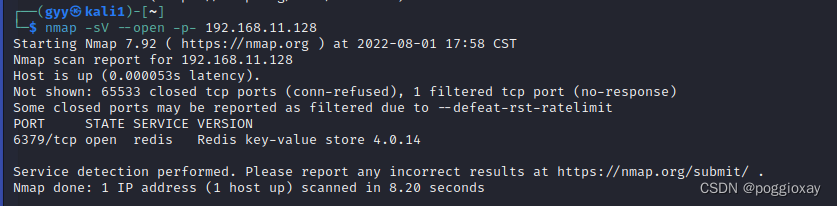
SSRF-服务器端请求伪造-相关知识
Neck modules of the yolo series
年轻人为什么不喜欢买蒙牛、伊利了?
“蔚来杯“2022牛客暑期多校训练营4 N
情人节浪漫3D照片墙【附源码】
【水一个徽章】
Arduino框架下I2S控制ADC采样以及PWM输出示例解析
“蔚来杯“2022牛客暑期多校训练营3 C
【微信小程序】信息管理与信息系统专业社会实习制作项目--垃圾指纹
抽奖/秒杀/竞价/评分/权威/投票,技术教你用合适的方法做好活动
缓存中间件技术选型Memcached、MongoDB、Redis
Flutter教程大全合集(2022年版)
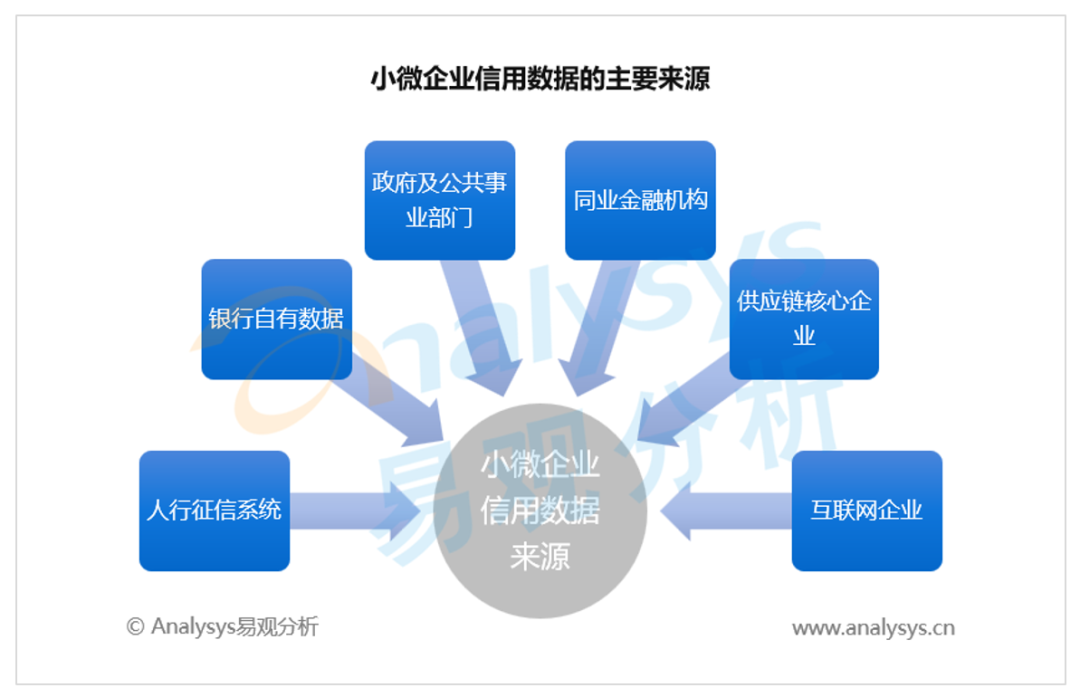
聚焦数据来源、数据质量和模型性能构建小微企业信用画像
COMSOL空气反应 模型框架
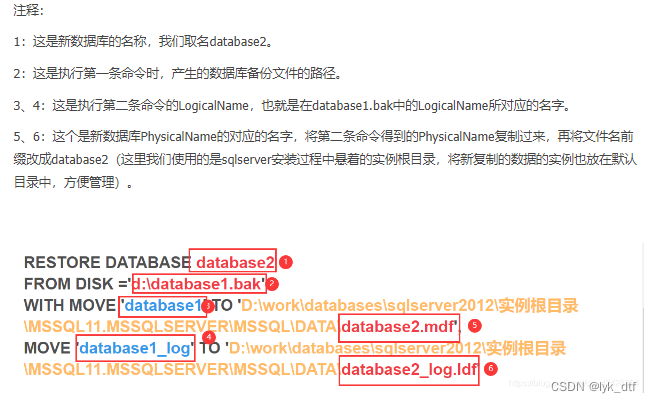
sqlserver删除重复数据
leetcode 48. Rotate Image 旋转图像(Medium)