当前位置:网站首页>《opencv学习笔记》-- 边缘检测和canny算子、sobel算子、LapIacian 算子、scharr滤波器
《opencv学习笔记》-- 边缘检测和canny算子、sobel算子、LapIacian 算子、scharr滤波器
2022-07-26 03:47:00 【cc_rong】
目录
边缘检测
边缘检测步骤:
1、滤波:
边缘检测的算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感,因此必须采用滤波器来改善与噪声有关的边缘检测器的性能。常见的滤波方法主要有高斯滤波,即采用离散化的高斯函数产生一组归一化的高斯核,然后基于高斯核函数对图像灰度矩阵的每一点进行加权求和。
2、增强:
增强边缘的基础是确定图像各点邻域强度的变化值。增强算法可以将图像灰度点邻域强度值有显著变化的点凸显出来。通过计算梯度幅值来确定。梯度相关算法:膨胀、腐蚀、开运算、闭运算、形态学梯度、顶帽(礼帽)、黑帽。
3、检测:
经过增强的图像,往往邻域中有很多点的梯度值比较大,而在特定的应用中,这些点并不是我们要找的边缘点,所以应该采用某种方法来对这些点进行取舍。实际工程中,常用的方法是通过阈值化方法来检测。
canny算子
canny算子的目标是:找到一个最优的边缘检测算法。
最优的边缘检测评价标准:
1.低错误率: 标识出尽可能多的实际边缘,同时尽可能的减少噪声产生的误报。
2.高定位性: 标识出的边缘要与图像中的实际边缘尽可能接近。
3.最小响应: 图像中的边缘只能标识一次,并且可能存在的图像噪声不应标识为边缘。
canny边缘检测的步骤:
1.消除噪声。一般情况下,使用高斯平滑滤波器卷积降噪。
如下显示了一个 size = 5 的高斯内核示例:
2.计算梯度幅值和方向。 按照Sobel滤波器的步骤。
i、运用一对卷积阵列 (分别作用于 x 和 y 方向):
ii、使用下列公式计算梯度幅值和方向:
梯度方向近似到四个可能角度之一(一般为0°, 45°, 90°, 135°)
3.非极大值抑制。 这一步排除非边缘像素, 仅仅保留了一些细线条(候选边缘)。
4.滞后阈值。Canny 使用了滞后阈值,滞后阈值需要两个阈值(高阈值和低阈值):
i.如果某一像素位置的幅值超过高阈值, 该像素被保留为边缘像素。
ii.如果某一像素位置的幅值小于低阈值, 该像素被排除。
iii.如果某一像素位置的幅值在两个阈值之间,该像素仅仅在连接到一个高于高阈值的
像素时被保留。
void canny(InputArray image, OutputArray edges, double threshold1, double threshold2, int apertureSize = 3, bool L2gradient = false )参数1,InputArray类型的image,输入图像,填Mat类的对象,且需为单通道8位图像。
参数2,OutputArray类型的edges,输出的边缘图,需和源图像有一样的尺寸和类型。
参数3,double类型的threshold1,第一个滞后性阈值。
参数4,double类型的threshold2,第二个滞后性阈值。
参数5,int类型的apertureSize,表示应用Sobel算子的孔径大小,其有默认值3。
参数6,bool类型的L2gradient,一个计算图像梯度幅值的标识,有默认值false。
注意:
threshold1和threshold2两者中的较小者用于边缘连接,而较大者用来控制强边缘的
初始段,推荐的高低阈值比在2:1到3:1之间。
//高阶的canny用法,转成灰度图,降噪,用canny,
//最后将得到的边缘作为掩码,拷贝原图到效果图上,
//得到彩色的边缘图



sobel算子
主要用作边缘检测的离散微分算子。
Sobel算子结合了高斯平滑和微分求导,用来计算图像灰度函数的近似梯度。在图像的任何一点使用此算子,将会产生对应的梯度矢量或是其法矢量。
优点:方法简单、处理速度快,并且所得的边缘光滑、连续。
缺点:边缘较粗,由于处理时需作二值化处理,故得到的边缘与阈值的选取也有很大的关系
sobel算子的步骤:
1.分别在x和y两个方向求导。
i、水平变化: 将 I 与一个奇数大小的内核Gx进行卷积。比如,当内核大小为3时,
Gx的计算结果为:
ii、垂直变化: 将 I 与一个奇数大小的内核Gx进行卷积。比如,当内核大小为3时,
Gx的计算结果为:
2.在图像的每一点,结合以上两个结果求出近似梯度:
或者
使用扩展的 Sobel 算子,来计算一阶、二阶、三阶或混合图像差分。
void Sobel(InputArray src, OutputArray dst, int ddepth, int dx, int dy, int ksize = 3, double scale = 1, double delta = 0, int borderType = BORDER_DEFAULT);参数1,InputArray 类型的src,为输入图像,填Mat类型即可。
参数2,OutputArray类型的dst,即目标图像,需要和源图片有一样的尺寸和类型。
参数3,int类型的ddepth,输出图像的深度,支持如下src.depth()和ddepth的组合:
若src.depth() = CV_8U, 取ddepth = -1/CV_16S/CV_32F/CV_64F
若src.depth() = CV_16U/CV_16S, 取ddepth = -1/CV_32F/CV_64F
若src.depth() = CV_32F, 取ddepth = -1/CV_32F/CV_64F
若src.depth() = CV_64F, 取ddepth = -1/CV_64F
参数4,int类型dx,x 方向上的差分阶数,1或者0。
参数5,int类型dy,y方向上的差分阶数,1或者0。
参数6,int类型ksize,有默认值3,表示Sobel核的大小;可取值1,3,5或7。
参数7,double类型的scale,计算导数值时可选的缩放因子,默认值是1,
表示默认情况下是没有应用缩放的。
参数8,double类型的delta,表示在结果存入目标图(第二个参数dst)之前可选的delta值,
有默认值0。
参数9, int类型的borderType,边界模式,默认值为BORDER_DEFAULT。
一般情况下,都是用ksize X ksize内核来计算导数的。
有一种特殊情况 ------ 当ksize为1时,往往会使用3 X 1或者1 X 3的内核。且这种情况下,并没有进行高斯平滑操作。
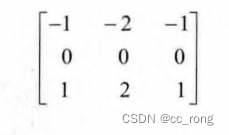
1.当内核大小为 3 时, Sobel内核可能产生比较明显的误差(Sobel算子只是求取了导数的近似值而已)。 为解决这一问题,OpenCV提供了Scharr 函数,但该函数仅作用于大小为3的内核。该函数的运算与Sobel函数一样快,但结果却更加精确,其内核是这样的:
2.Sobel算子结合了高斯平滑和分化,因此结果会具有更多的抗噪性。大多数情况下,使用sobel函数时,取【xorder = 1,yorder = 0,ksize = 3】来计算图像X方向的导数,【xorder = 0,yorder = 1,ksize = 3】来计算图像y方向的导数。
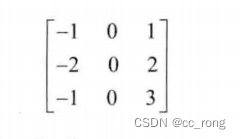
计算图像X方向的导数,取【xorder= 1,yorder = 0,ksize = 3】对应的内核:
计算图像Y方向的导数,取【xorder= 0,yorder = 1,ksize = 3】对应的内核:




LapIacian 算子 (拉普拉斯)
LapIacian 算子是n维欧几里德空间中的一个二阶微分算子,定义为梯度grad()的散度div()。如果f是二阶可微的实函数,则f的拉普拉斯算子定义为:
1、f的拉普拉斯算子也是笛卡儿坐标系中的所有非混合二阶偏导数求和.
2 、作为一个二阶微分算子,拉普拉斯算子把C函数映射到C函数,对于k ≥ 2。表达式(1)(或(2))定义了一个算子Δ :C(R) → C(R),对于任何开集Ω,定义了一个算子 C(Ω) →C(Ω)。
Laplacian 算子的定义:
由于 Laplacian使用了图像梯度,Laplacian内部的代码是调用了 Sobel 算子的。
让一幅图像减去它的Laplacian算子可以增强对比度。
void Laplacian(InputArray src, OutputArray dst, int ddepth, int ksize = 1, double scale = 1, double delta = 0, int borderType = BORDER_DEFAULT );参数1,输入图像Mat类的对象, 且需为单通道8位图像。
参数2,输出的边缘图,需要和源图片有一样的尺寸和通道数。
参数3,int类型的ddept,目标图像的深度。
参数4,用于计算二阶导数的滤波器的孔径尺寸(高斯核大小),大小必须为正奇数,
且有默认值1。
参数5,计算拉普拉斯值的时候可选的比例因子,有默认值1。
参数6,表示在结果存入目标图(第二个参数dst)之前可选的delta值,有默认值0。
参数7,边界模式,默认值为BORDER_DEFAULT。这个参数可以在borderInterpolate()
中查看。
Laplacian()函数其实主要是利用sobel算子的运算。通过加上sobel算子运算出的图像x方向和y方向上的导数,来得到载入图像的拉普拉斯变换结果。其中,sobel算子(ksize>1)如下:
当ksize=1时,Laplacian()函数采用以下3 X 3的孔径:



scharr滤波器
主要是配合Sobel算子的运算而存在的。
使用Scharr滤波器运算符计算x或y方向的图像差分。
void Scharr( InputArray src, // 源图 OutputArray dst, // 目标图,需要和源图像一样的尺寸和类型 int ddepth, // 图像深度 int dx, // x方向上的差分阶数 int dy, // y方向上的差分阶数 double scale=1, // 缩放因子 double delta=0, // delta值 int borderType = BORDER_DEFAULT // 边界模式 )参数3,int类型的ddepth,输出图像的深度,支持如下src.depth()和ddepth的组合:
若src.depth() = CV_8U, 取ddepth = -1/CV_16S/CV_32F/CV_64F
若src.depth() = CV_16U/CV_16S, 取ddepth = -1/CV_32F/CV_64F
若src.depth() = CV_32F, 取ddepth = -1/CV_32F/CV_64F
若src.depth() = CV_64F, 取ddepth = -1/CV_64F
参数6,计算导数值时可选的缩放因子,默认值是1,表示默认情况下是没有应用缩放的。
Scharr(src, dst, ddepth, dx, dy, scale, delta, borderType); 等价
Sobel(src, dst, ddepth, dx, dy, CV_SCHARR, scale, delta, borderType);
边栏推荐
- Performance comparison of ext4, NTFS, XFS, Btrfs, ZFS, f2fs and ReiserFS
- Usage of tf.variable() function in tensorflow
- [MCU simulation project] external interrupt 0 and 1 control two digit nixie tube to count
- Illustration leetcode - 5. Longest palindrome substring (difficulty: medium)
- leetcode: 102. 二叉树的层序遍历
- Why are more and more users of Bing search?
- 2020 AF-RCNN: An anchor-free convolutional neural network for multi-categoriesagricultural pest det
- [class and object instances in kotlin]
- PHP connects to MySQL database, and database connects to static tool classes to simplify the connection.
- DDD landing is called an advanced
猜你喜欢
![[experience sharing] strong recommendation - screenshot gadget FastStone capture (FSC)](/img/d1/143192f55295ce338af1ee04dd8ba8.png)
[experience sharing] strong recommendation - screenshot gadget FastStone capture (FSC)

C语言函数(2)

How Lora wireless gateway can quickly realize end-to-cloud transmission

Navicat connects to MySQL database on Cloud Server

Graduation season & harvest season, leave your beautiful moments

Bracket nesting problem (recommended Collection)

9-20v input peak charging current 3A dual lithium switch type charging chip sc7102

What are you interviewing for in a big factory? It's worth watching (I)

Idea2020.3.1 cannot be opened (double click cannot be opened), but it can be opened through idea.bat.
基于SSM选课信息管理系统
随机推荐
Completion report of communication software development and Application
Hurry in!!! Write a number guessing game with dozens of lines of code based on the basic knowledge of C language
微信小程序实现音乐播放器(4)(使用pubsubjs实现页面间通信)
Apply for SSL certificate, configure SSL certificate for domain name, and deploy server; Download and installation of SSL certificate
Mbr3045ct Schottky diode, mbr0100, mbr2060ct diode parameters
[class and object instances in kotlin]
File upload error: current request is not a multipart request
KBPC1510-ASEMI大芯片15A整流桥KBPC1510
Bing(必应)搜索,为什么用户越来越多?
Visio: how do Gantt charts merge cells? Solution: overwrite cells
基于Caffe ResNet-50网络实现图片分类(仅推理)的实验复现
bond网络模式配置
redis集群的三种方式
深度学习之DAT
Network model and protocol
文件上传报错:Current request is not a multipart request
php 实现从1累加到100的算法
赶紧进来!!!用c语言基础知识几十行代码写一个猜数字小游戏
Alibaba Sentinel - cluster traffic control
Find My技术|物联网资产跟踪市场规模达66亿美元,Find My助力市场发展