当前位置:网站首页>3D point cloud course (VI) -- 3D target detection
3D point cloud course (VI) -- 3D target detection
2022-07-23 19:42:00 【The birch tree has no tears】
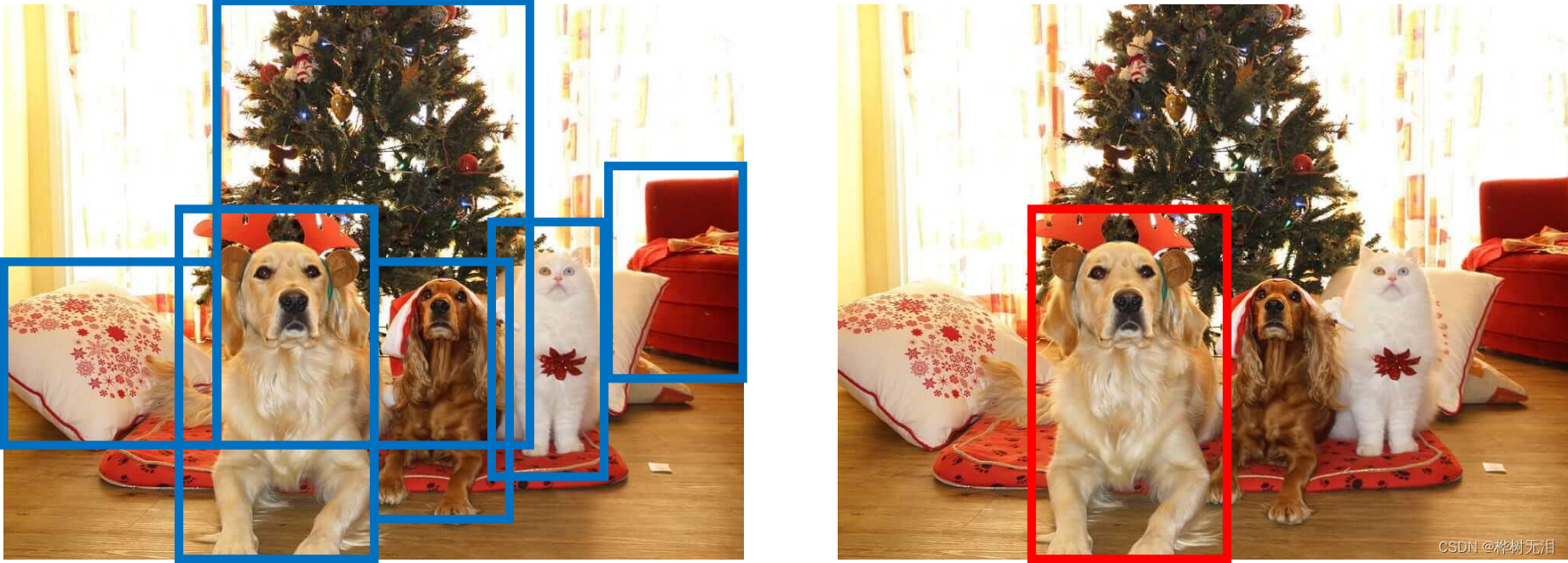
1. Image target detection
Box representation : LWH 、 Center point 、 toward 、 Category
![]()
Ideas : Detect first and then classify
 1.1 Evaluate the quality of the test
1.1 Evaluate the quality of the test

Precision: Probability of detecting the right Recall: Probability of detection It's hard to have both 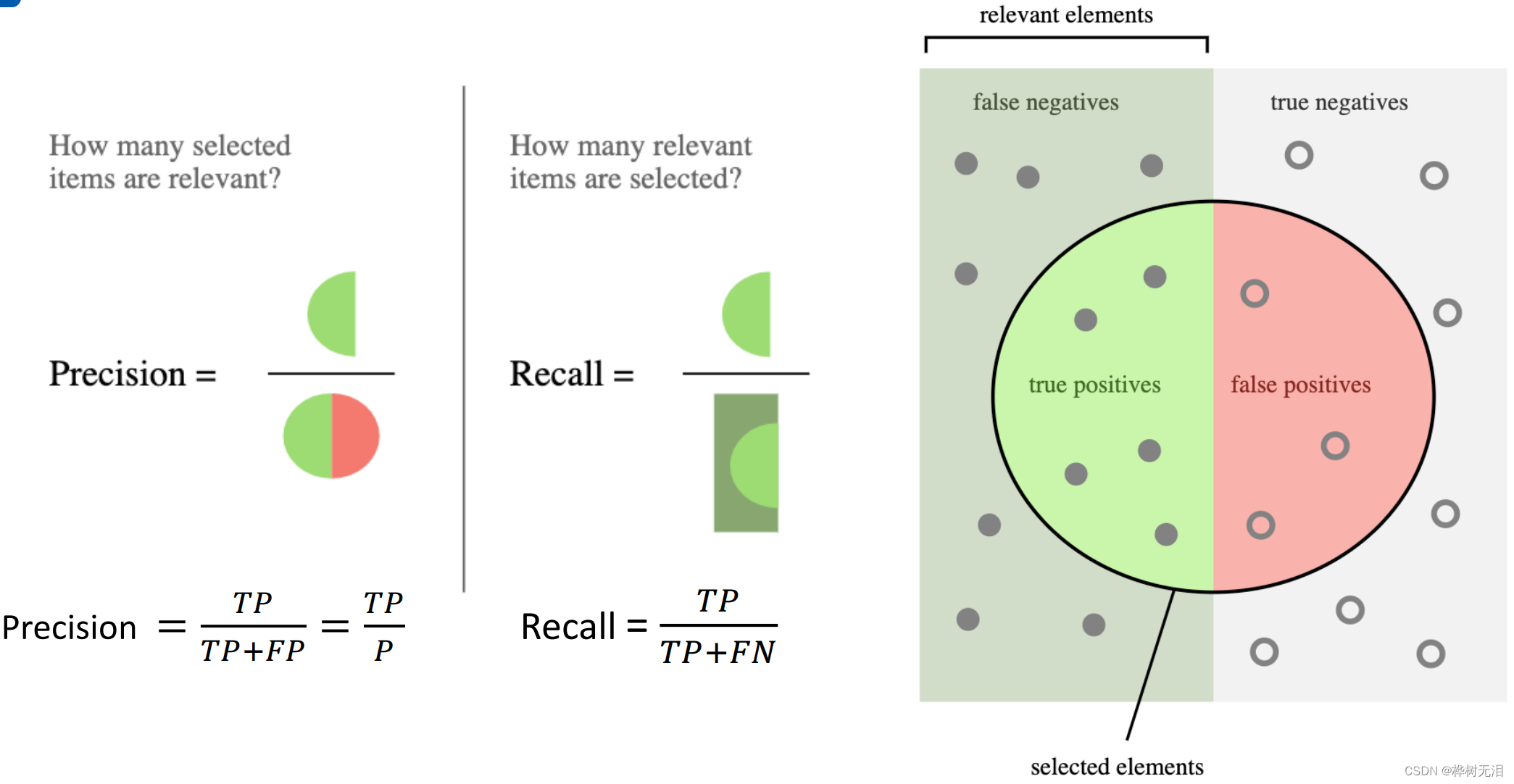
- AP(Average Precision) mAP(Mean over all categories)

- NMS
Each selector is followed by NMS, Select the best detection box
Select the box with the highest confidence , Then calculate the overlapping range of other boxes and this box IOU, If it is greater than a certain threshold, it will be rounded off .

1.2 Methods of object detection

1.2.1 Two-Stage
First locate and then detect
- RCNN : In essence, it is a clustering frame , Then classify the boxes . It is slow to classify each box

- Fast RCNN
 First, extract features from the image , Again ROI Pooling Zoom to uniform size , after MLP. Classification neural network is working in Feature map Upper .
First, extract features from the image , Again ROI Pooling Zoom to uniform size , after MLP. Classification neural network is working in Feature map Upper .
ROI Pooling The specific process is as follows , No matter what the original size of the box is , Finally, they are scaled to 7*7.


 ROI Pooling There is a loss of precision , Put forward ROI Align linear interpolation
ROI Pooling There is a loss of precision , Put forward ROI Align linear interpolation

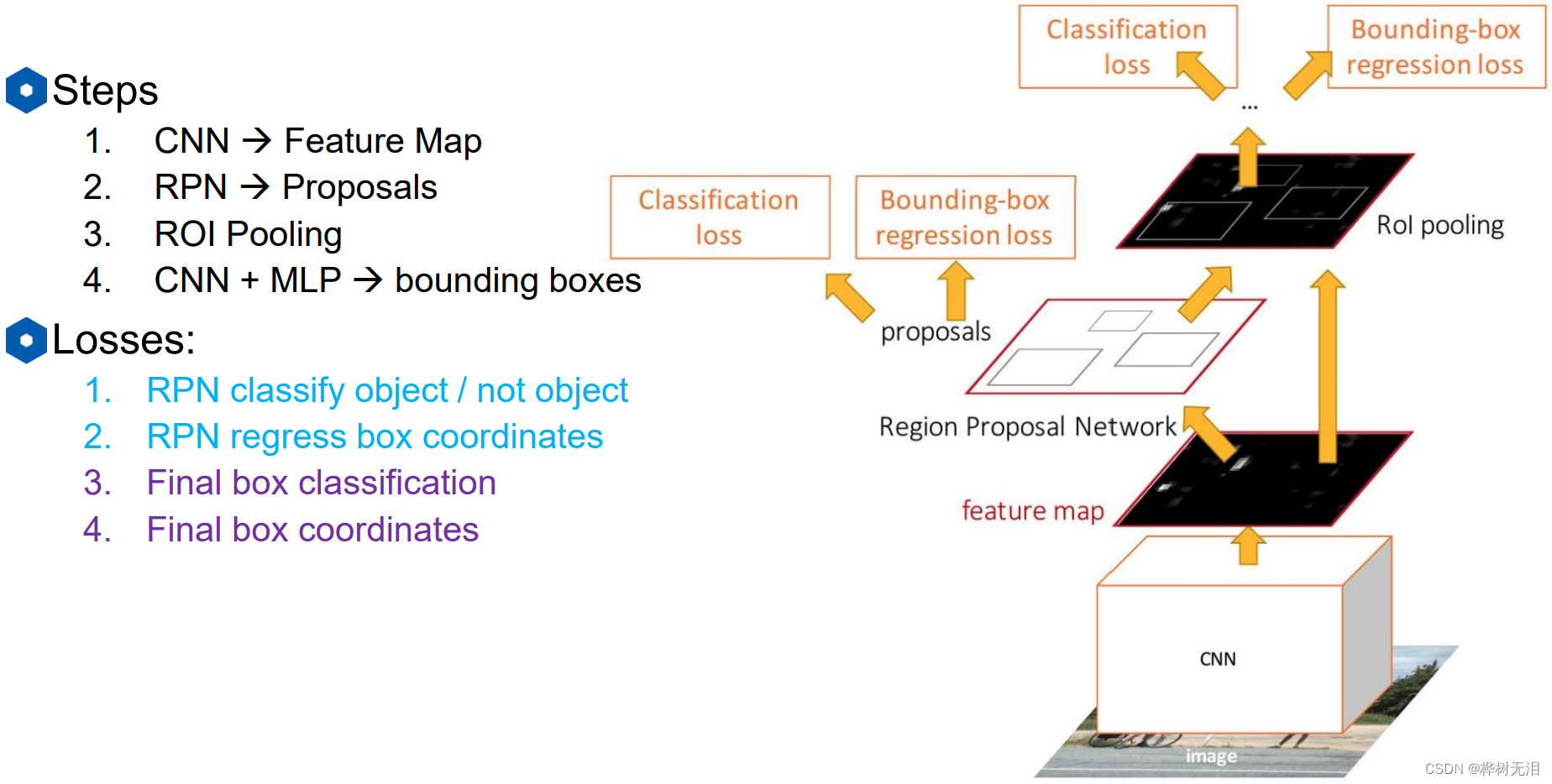
- Faster RCNN
The box is given by deep learning
- Mask RCNN Instance segmentation

1.2.2 One-Stage
Think of the background as a class , Out of every place 3 individual anchor box , Classify each , Calculation location . No, first judge whether there is an object in the box .


2. Point cloud target detection
Projection angle
Three dimensional grid
Projection
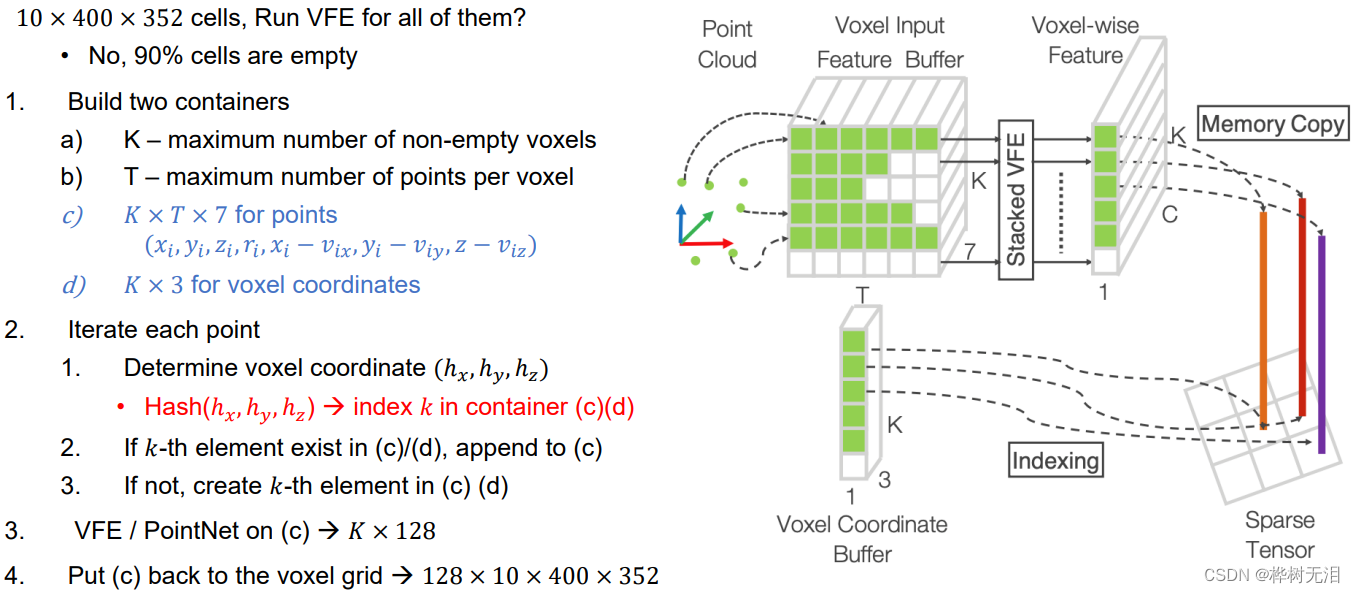
2.1 VoxelNet
Three dimensional convolution pointnet++


There are many squares without dots , No afferent neural network is needed , The acceleration method is as follows

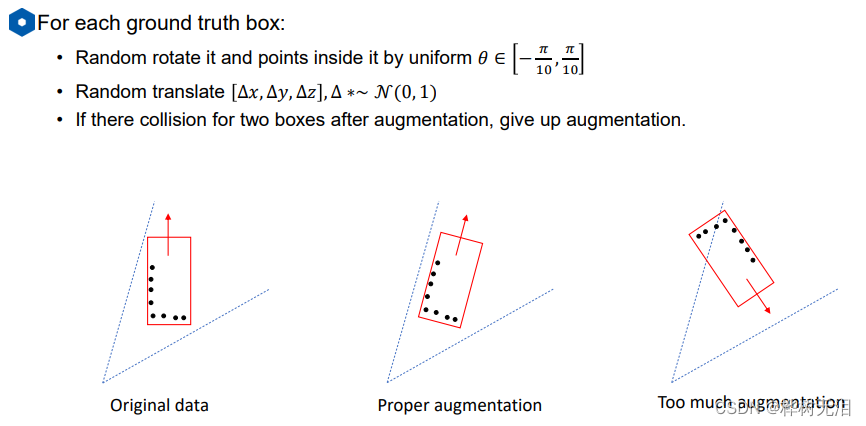
- Data Augmentation
1、 Rotate the whole point cloud , But don't rotate too much
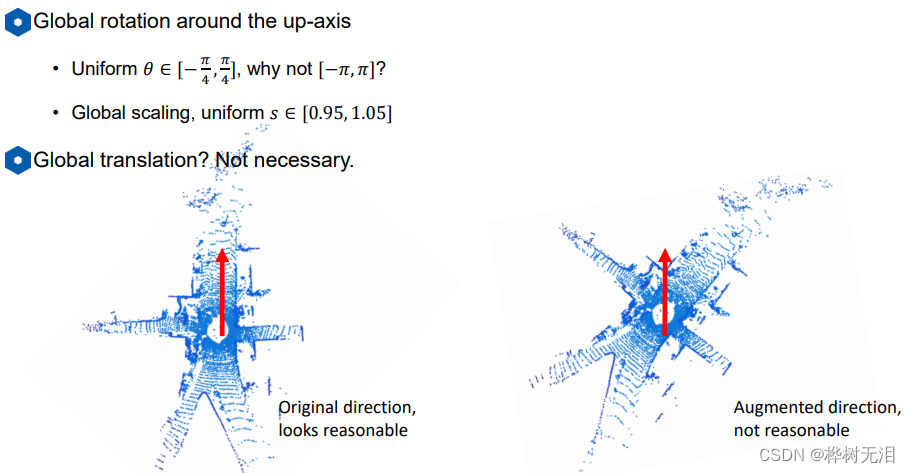
2、 Translate and rotate the target , Not too much
 2.2 PointPillars
2.2 PointPillars
 A pile of columns in the space , Each column is compressed into a plane
A pile of columns in the space , Each column is compressed into a plane

- Focal Loss
Solving the problem of unbalanced categories , Normally, less categories will be ignored , This method turns attention to small categories .


2.3 Point-wise operation
2.3.1 PointRCNN
- Get the of each point feature vector
- Divide the foreground and background , Make one for each prospect proposal
- every last box do ROI Pooling
All operations are input in the form of points 


2.4 Vison Fusion
2.4.1 Frustum PointNet
Project the frame on the image onto the point cloud , Vision and LIDAR It is difficult to align in time and space .
 2.4.2 PointPainting
2.4.2 PointPainting

边栏推荐
- Mysql database [Database Foundation -- introduction]
- USB3.0: layout guide for vl817q7-c0
- Paddle implementation, multidimensional time series data enhancement, mixup (using beta distribution to make continuous random numbers)
- Mysql主从复制
- 二、MFC窗口和消息
- 某些题目对应的智慧数据总结
- ACM mm 2022 oral | dig: the new framework of self-monitoring character recognition refreshes the recognition performance of 11 public scene character data sets, with an average improvement of 5%
- Elk notes 25 - experience APM quickly
- 单调队列优化DP
- PowerCLi 添加esxi主机到vCenter
猜你喜欢

ES6其他语法及扩展语法总结

【leetcode天梯】链表 · 022 链表中倒数第k个节点

Todo fix bug tag feature and other configurations
时代潮头,华为将风帆对准数字金融的风与海

【开发经验】开发项目踩坑集合【持续更新】

USB3.0:VL817Q7-C0的LAYOUT指南

三维点云课程(七)——特征点描述

There is great competition pressure for software testing jobs, and the "migrant workers" who graduated from 985 also suffer

LeetCode刷题:回文数
DHCP:在网络中防止 Rogue DHCP Server
随机推荐
Safely stop NodeOS
BoundsChecker用法「建议收藏」
Challenges of decentralized storage
R语言ggpubr包的ggarrange函数多幅图像组合起来、annotate_figure组合图像添加注释、注解、标注信息、使用top参数在可视化图像顶部添加注解信息(自定义字体颜色、大小、样式)
R language mapping: coordinate axis setting
安全停止nodeos
进程调度的基本过程
Summarize some recent tricks
You must execute multiple requests and catch errors. Using try catch is not elegant
R语言筛选dataframe指定的数据列、R语言排除(删除)dataframe中的指定数据列(变量)
Labyrinth DP integration
在Hyper-V中手动将.avhd合并到.vhd
公链之Sui(前脸书/Meta员工成立的新公链项目)
行业分析| 物流对讲
结构体大小的计算(结构体内存对齐)
Eight common SQL misuses in MySQL
Todo fix bug tag feature and other configurations
入门数据库Days3
ACM MM 2022 Oral | DIG: 自监督文字识别的新框架,刷新11个公开场景文字数据集的识别性能,平均提升5%...
.Net CLR R2R编译的原理简析