当前位置:网站首页>Summarize and learn STM32 to create project template
Summarize and learn STM32 to create project template
2022-07-26 06:44:00 【Flowers bloom in half ོ】
Because I learned from ant factory , I feel that the method they teach is very good , however , I also have a little opinion on typesetting .
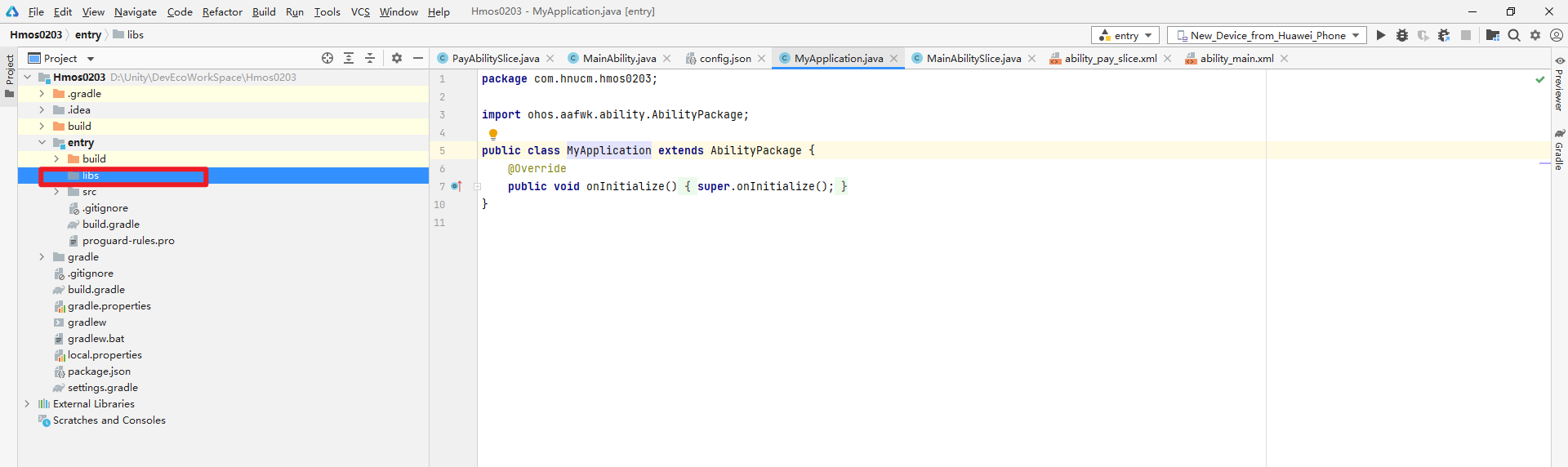
use CUBE MX After generating the code , You can create an intermediate layer BSP.

And then put BSP Move this layer to this position
 You can add .c Documents ..
You can add .c Documents ..
You can add 4 individual .c file , Of course, just follow your habits .
led_key.c
#include "led_key.h"
void Led_Disp(uint8_t ucled)
{
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15|GPIO_PIN_8
|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC,ucled<<8,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
}
uint8_t Key_Scans(void)
{
uint8_t ucKey_val = 0;
if(key1 == Key_Down)
ucKey_val = 1;
if(key2 == Key_Down)
ucKey_val = 2;
if(key3 == Key_Down)
ucKey_val = 3;
if(key4 == Key_Down)
ucKey_val = 4;
return ucKey_val;
}
led_key.h
#ifndef _LED_KEY
#define _LED_KEY
#include "main.h"
#define key1 HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0)
#define key2 HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1)
#define key3 HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2)
#define key4 HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)
#define Key_Down GPIO_PIN_RESET
void Led_Disp(uint8_t ucled);
uint8_t Key_Scans(void);
#endif
bsp_adc.c
#include "bsp_adc.h"
/* Use query ADC sampling */
uint32_t Get_Adc2_IN15(void) /* PB15 R37*/
{
uint32_t Adc2_IN15_value = 0;
HAL_ADC_Start(&hadc2);
if(HAL_ADC_PollForConversion(&hadc2,50) == HAL_OK)
{
Adc2_IN15_value = HAL_ADC_GetValue(&hadc2);
}
return Adc2_IN15_value;
}
/* Obtain by interrupt ADC1 passageway 11 Value */
uint32_t Adc1_IN11_value;
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef *hadc)
{
if(hadc->Instance == ADC1)
{
Adc1_IN11_value = HAL_ADC_GetValue(&hadc1);
}
HAL_ADC_Start_IT(&hadc1);
}
bsp_adc.h
#ifndef _BSP_ADC
#define _BSP_ADC
#include "main.h"
#include "adc.h"
extern uint32_t Adc1_IN11_value;
uint32_t Get_Adc2_IN15(void);
#endif
led.c and i2c.c It has been provided to us .
iic and mcp4017 Read and write code
/* EEPROM Related codes */
void Write_AT24C02(uint8_t *buf,uint8_t addr,uint8_t len)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
while(len--)
{
I2CSendByte(*buf++);
I2CWaitAck();
}
I2CStop();
delay1(500);
}
void Read_AT24C02(uint8_t *buf,uint8_t addr,uint8_t len)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CStart();
I2CSendByte(0xa1);
I2CWaitAck();
while(len--)
{
*buf++ = I2CReceiveByte();
if(len)
I2CSendAck();
else
I2CSendNotAck();
}
I2CStop();
delay1(500);
}
/* MCP4017*/
void Write_MCP4017(uint8_t value)
{
I2CStart();
I2CSendByte(0x5e);
I2CSendAck();
I2CSendByte(value);
I2CSendAck();
I2CStop();
}
uint8_t Read_MCP4017(void)
{
uint8_t value;
I2CStart();
I2CSendByte(0x5f);
I2CSendAck();
value = I2CReceiveByte();
I2CSendNotAck();
I2CStop();
return value;
}
Then the rest of the functions are main.c Just implement it inside .
Key handling functions
void Key_Proc(void)
{
if(uwTick - key_uwTick < 50)
return;
key_uwTick = uwTick;
//uint8_t ucKey_Val,ucKey_Down,ucKey_Up,ucKey_Old;
ucKey_Val = Key_Scans();
ucKey_Down = ucKey_Val & (ucKey_Old ^ ucKey_Val);
ucKey_Up = ~ucKey_Val & (ucKey_Old ^ ucKey_Val);
ucKey_Old = ucKey_Val;
switch(ucKey_Down)
{
case 1:
ucled |= 0x88;
count = 1;
break;
case 2:
ucled &= (~0x88);
count = 2;
break;
case 3:
ucled |= 0x55;
count = 3;
break;
case 4:
ucled &= (~0x55);
count = 4;
break;
}
}led Processing function
void Led_Proc(void)
{
if(uwTick - led_uwTick < 200)
return;
led_uwTick = uwTick;
Led_Disp(ucled);
}
lcd Processing function
void Lcd_Proc(void)
{
if(uwTick - lcd_uwTick < 200)
return;
lcd_uwTick = uwTick;
HAL_RTC_GetTime(&hrtc,&H_M_S,RTC_FORMAT_BIN);
HAL_RTC_GetDate(&hrtc,&Y_M_D,RTC_FORMAT_BIN);
sprintf((char *)lcd_disp_string,"test:%02d i:%d",count,i);
LCD_DisplayStringLine(Line9,lcd_disp_string);
sprintf((char *)lcd_disp_string,"R37_Value:%.2fV",Get_Adc2_IN15()*3.3/4096);
LCD_DisplayStringLine(Line0,lcd_disp_string);
sprintf((char *)lcd_disp_string,"R38_Value:%.2fV",Adc1_IN11_value*3.3/4096);
LCD_DisplayStringLine(Line1,lcd_disp_string);
sprintf((char *)lcd_disp_string,"sbuf2:%d,%d,%d,%d,%d",sbuf2[0],sbuf2[1],sbuf2[2],sbuf2[3],sbuf2[4]);
LCD_DisplayStringLine(Line2,lcd_disp_string);
sprintf((char *)lcd_disp_string,"MCP_4017:%X",MCP_4017);
LCD_DisplayStringLine(Line3,lcd_disp_string);
sprintf((char *)lcd_disp_string,"pwm_duty1:%.2f",pwm_duty1);
LCD_DisplayStringLine(Line4,lcd_disp_string);
sprintf((char *)lcd_disp_string,"pwm_duty2:%.2f",pwm_duty2);
LCD_DisplayStringLine(Line5,lcd_disp_string);
sprintf((char *)lcd_disp_string,"Time:%02d-%02d-%02d",Y_M_D.Year,Y_M_D.Month,Y_M_D.Date);
LCD_DisplayStringLine(Line6,lcd_disp_string);
sprintf((char *)lcd_disp_string,"Time:%02d-%02d-%02d",H_M_S.Hours,H_M_S.Minutes,H_M_S.Seconds);
LCD_DisplayStringLine(Line7,lcd_disp_string);
}Serial port correlation function
void Usart_Proc(void)
{
if(uwTick - usart_uwTick < 1000)
return;
usart_uwTick = uwTick;
HAL_UART_Transmit(&huart1,tx_dat,sizeof(tx_dat),50);
}The basic timer realizes the basic timing function
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM6)
{
if(++t == 1000)
{
ucled ^= 0x1;
t = 0;
i++;
if(i == 1000)
i = 0;
}
}
}pwm Pulse input
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM2) //PA15 R40
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
pwm_count1 = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1)+1;
pwm_duty1 = (float)pwm_high1/pwm_count1;
}
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2)
{
pwm_high1 = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_2)+1;
}
}
if(htim->Instance == TIM3) //PB4 R39
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
pwm_count2 = HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_1)+1;
pwm_duty2 = (float)pwm_high2/pwm_count2;
}
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2)
{
pwm_high2 = HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_2)+1;
}
}
}Square wave output
void HAL_TIM_OC_DelayElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM4)
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
CCR_Value1 = __HAL_TIM_GetCounter(htim) + 100;
__HAL_TIM_SET_COMPARE(htim,TIM_CHANNEL_1,CCR_Value1);
}
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2)
{
CCR_Value2 = __HAL_TIM_GetCounter(htim) + 400;
__HAL_TIM_SET_COMPARE(htim,TIM_CHANNEL_1,CCR_Value2);
}
}
}main What's in the function
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_ADC1_Init();
MX_ADC2_Init();
MX_USART1_UART_Init();
MX_TIM6_Init();
MX_TIM2_Init();
MX_TIM3_Init();
MX_RTC_Init();
MX_TIM4_Init();
MX_TIM15_Init();
/* USER CODE BEGIN 2 */
/* LCD initialization */
LCD_Init();
LCD_Clear(White);
LCD_SetBackColor(White);
LCD_SetTextColor(Black);
/* start-up ADC1 Channel sampling */
HAL_ADC_Start_IT(&hadc1);
/* Reading and writing EEPROM*/
I2CInit();
Write_AT24C02(sbuf1,0,sizeof(sbuf1));
HAL_Delay(10);
Read_AT24C02(sbuf2,0,sizeof(sbuf2));
/* MCP4017*/
Write_MCP4017(0x45);
MCP_4017 = Read_MCP4017();
/* Turn on the serial port to receive the interrupt */
HAL_UART_Receive_IT(&huart1,&rx_dat,1);
/* Turn on the basic timer interrupt */
HAL_TIM_Base_Start_IT(&htim6);
/* open PWM Input interrupt */
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_2);
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_2);
/* Square wave output */
HAL_TIM_OC_Start_IT(&htim4,TIM_CHANNEL_1);
HAL_TIM_OC_Start_IT(&htim4,TIM_CHANNEL_2);
/* PWM Output */
HAL_TIM_PWM_Start(&htim15,TIM_CHANNEL_1);// Duty cycle 30%
HAL_TIM_PWM_Start(&htim15,TIM_CHANNEL_2);// Duty cycle 70%
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
Key_Proc();
Led_Proc();
Lcd_Proc();
// Usart_Proc();
}
/* USER CODE END 3 */
}Related variable definitions
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* Key variables */
__IO uint32_t key_uwTick;
uint8_t ucKey_Val,ucKey_Down,ucKey_Up,ucKey_Old;
uint32_t count;
/* LED Variable */
__IO uint32_t led_uwTick;
uint8_t ucled;
/* LCD Variable */
__IO uint32_t lcd_uwTick;
uint8_t lcd_disp_string[21];
/* EEPROM Related variables */
uint8_t sbuf1[5] = {13,45,24,56,67};
uint8_t sbuf2[5] = {0};
/* MCP4017 Variable */
uint8_t MCP_4017;
/* Serial port related variables */
__IO uint32_t usart_uwTick;
uint8_t tx_dat[20] = {"hello world!\r\n"};
/* Basic timer variables */
uint32_t t,i;
/* PWM The input variable */
uint32_t pwm_count1,pwm_count2;
uint32_t pwm_high1,pwm_high2;
float pwm_duty1,pwm_duty2;
/* rtc Related variables */
RTC_TimeTypeDef H_M_S;
RTC_DateTypeDef Y_M_D;
/* Square wave output related variables */
uint32_t CCR_Value1,CCR_Value2;
/* USER CODE END PV */When writing code before, I felt very messy , But after making a set of provincial competition questions , I suddenly feel that I know how to write , This only represents personal thoughts .
边栏推荐
- C language introduction practice (8): switch case calculates the month, year and day of the next day (normal year / leap year calculation)
- Gdown Access denied:Cannot retrieve the public link of the file.
- Integrated design of signal processing systems - Design of solver functions (continuous and discrete time systems)
- UIToolkit工具模板工程
- 【保姆级】包体积优化教程
- Delete ^m from VIM
- 【故障诊断】基于贝叶斯优化支持向量机的轴承故障诊断附matlab代码
- 力扣5: 最长回文子串
- Regular expressions and calling related functions in C language
- 【Star项目】小帽飞机大战(二)
猜你喜欢

Input the records of 5 students (each record includes student number and grade), form a record array, and then output them in order of grade from high to low The sorting method adopts selective sortin

Force buckle - 4. Find the median of two positive arrays
"Harmonyos" explore harmonyos applications
![[untitled]](/img/42/5e8b62edc0aa289098425b26df2453.jpg)
[untitled]

『牛客|每日一题』有效括号序列
力扣——4. 寻找两个正序数组的中位数

『期末复习』16/32位微处理器(8086)基本寄存器

Address resolution ARP Protocol
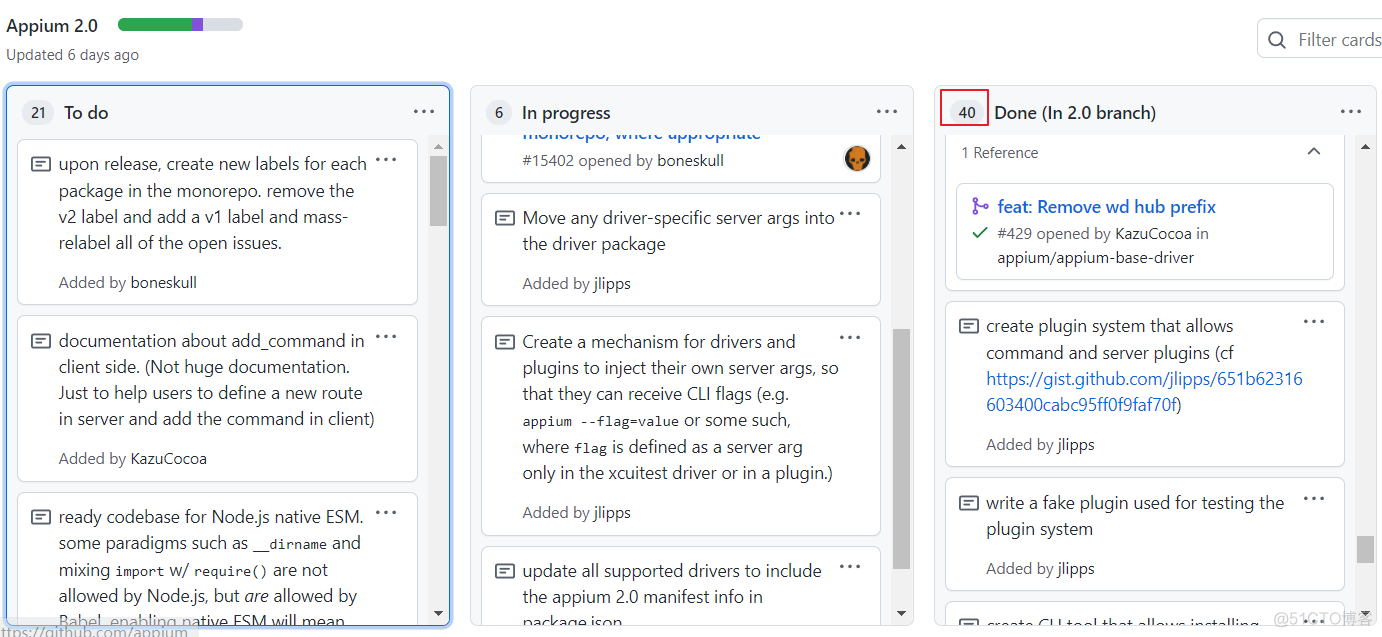
Upgrade appium automation framework to the latest 2.0

Decomposing a positive integer into prime factors requires decomposing into as many factors as possible.
随机推荐
Force deduction 5: Longest palindrome substring
C#使用log4net插件,输出日志到文件
Use and analysis of show profile optimized by MySQL
@Constructorproperties annotation understanding and its corresponding usage
[1] Basic knowledge of mathematical modeling
"Harmonyos" explore harmonyos applications
堆排序(heap-sort)
BPG notes (IV)
Advanced C language - archived address book (file)
Design principle of infrared circuit of single chip microcomputer
Go的map字典及约束
Database and the future of open source
抖音web端 s_v_web_id 参数生成分析与实现
UIToolkit工具模板工程
Force buckle - 3. Longest substring without repeated characters
Open includeexceptiondetailinfaults on the server (from servicebehaviorattribute or from & lt; servicedebug & gt; to configure behavior) to send exception information back
力扣——3. 无重复字符的最长子串
Experimental flags: --disable_ admission_ control=false --enable_ rm=false --llama_ callback_ port=28000
MySQL optimized index and index invalidation
What are the main reasons for server crash