当前位置:网站首页>少即是多:视觉SLAM的点稀疏化(IROS 2022)
少即是多:视觉SLAM的点稀疏化(IROS 2022)
2022-08-04 10:45:00 【3D视觉工坊】
论文名称:Keeping Less is More: Point Sparsification for Visual SLAM
出处:IROS 2022 ,作者:Yeonsoo Park和Soohyun Bae;
Paper:https://arxiv.org/pdf/2207.00225.pdf
整理:高斯球
简要叙述:特征点法的VSLAM系统中,特征点并不是越多越好;相反, 少量 并且 质量高 的点会让这个SLAM系统位姿精度更高,且消耗更少的存储资源和计算资源。本文基于上述情况,提出了一种在SLAM系统中实现地图点稀疏化的有效的图优化方法,进而减少一般特征点SLAM系统中的3D点和关键帧,减少了计算和存储资源,同时提高了位姿估计的精度。
Abstract
当将SLAM用于真实世界中实际的问题(例如自动驾驶、无人机和AR设备)上时,其内存占用和计算成本是限制性能和应用范围的两个主要的因素;在离散的特征点SLAM算法中,解决这个问题的一个有效的方式是通过local BA 和global BA删除点进而限制地图点的规模;本项研究中提出了一种在SLAM系统中 实现地图点稀疏化的有效的图优化方法,具体上作者将最大位姿可见性和最大空间多样性问题表示成一个最小成本最大流量图优化问题。作者所提出的
边栏推荐
- RL78开发环境
- 数字知识库及考学一体化平台
- Introduction to Mysql storage engine
- AWS Lambda related concepts and implementation approach
- Graphic and text hands-on tutorial--ESP32 MQTT docking EMQX local server (VSCODE+ESP-IDF)
- Jina 实例秀|基于神经搜索的网络安全威胁检测(一)
- cubemx stm32 afm3000 module gas flow sensor driver code
- 微信小程序自定义组件-城市选择「建议收藏」
- helm安装
- MATLAB程序设计与应用 3.2 矩阵变换
猜你喜欢
cubemx stm32 afm3000 module gas flow sensor driver code
iMeta | Baidu certification is completed, search "iMeta" directly to the publisher's homepage and submission link
C语言*小白的探险历程
sqlilabs less-40

Small program containers accelerate the construction of an integrated online government service platform
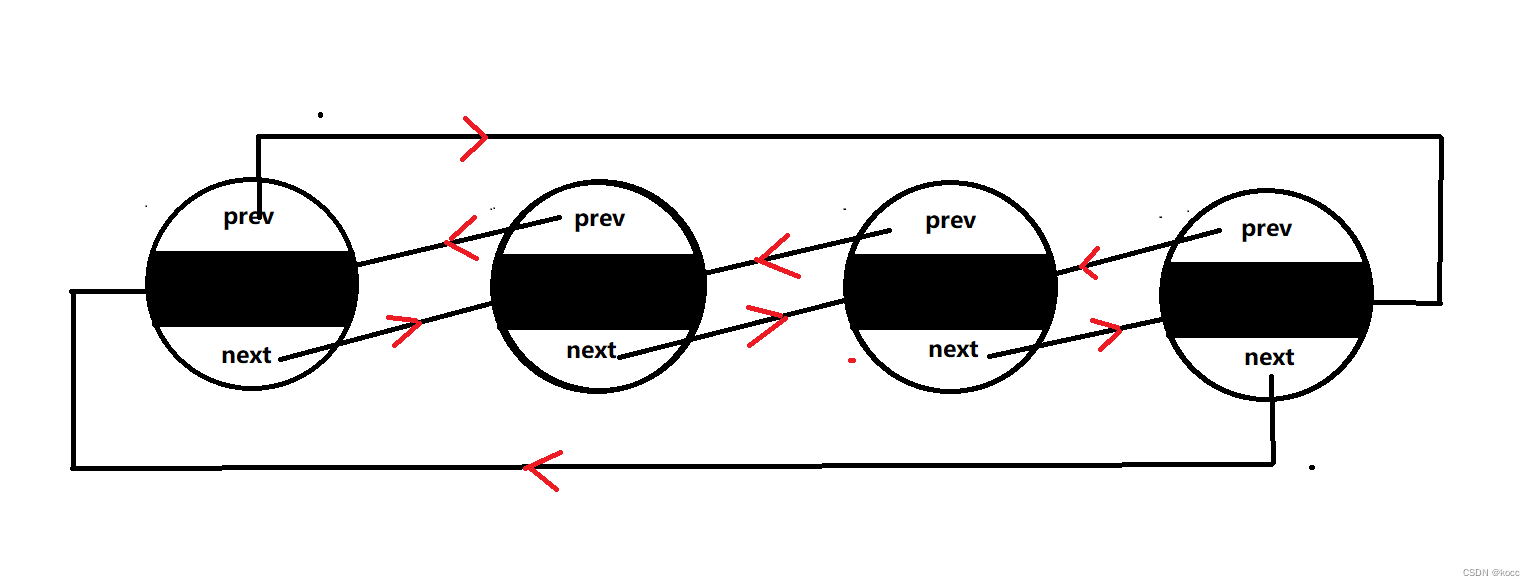
双向带头循环链表实现

《迁移学习导论》第2版,升级内容抢先看!
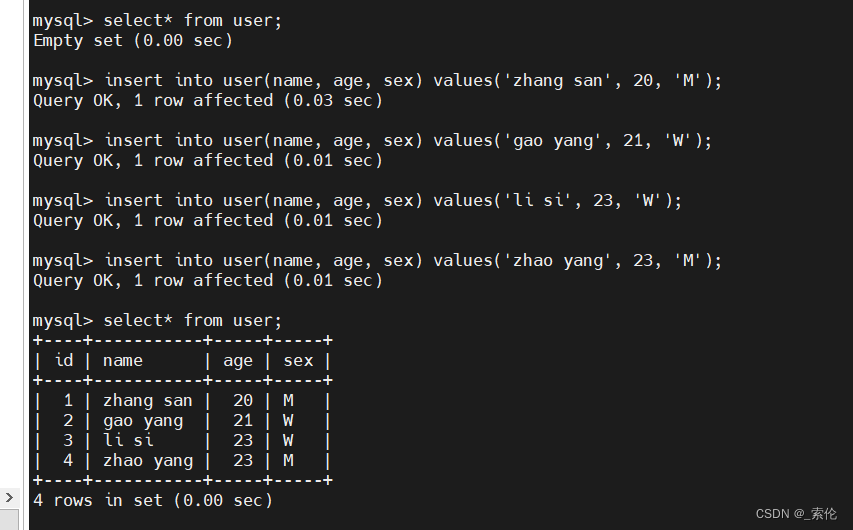
MySQL核心SQL:结构化查询语句SQL、库操作、表操作、CRUD

语音社交app源码——具备哪些开发优势?
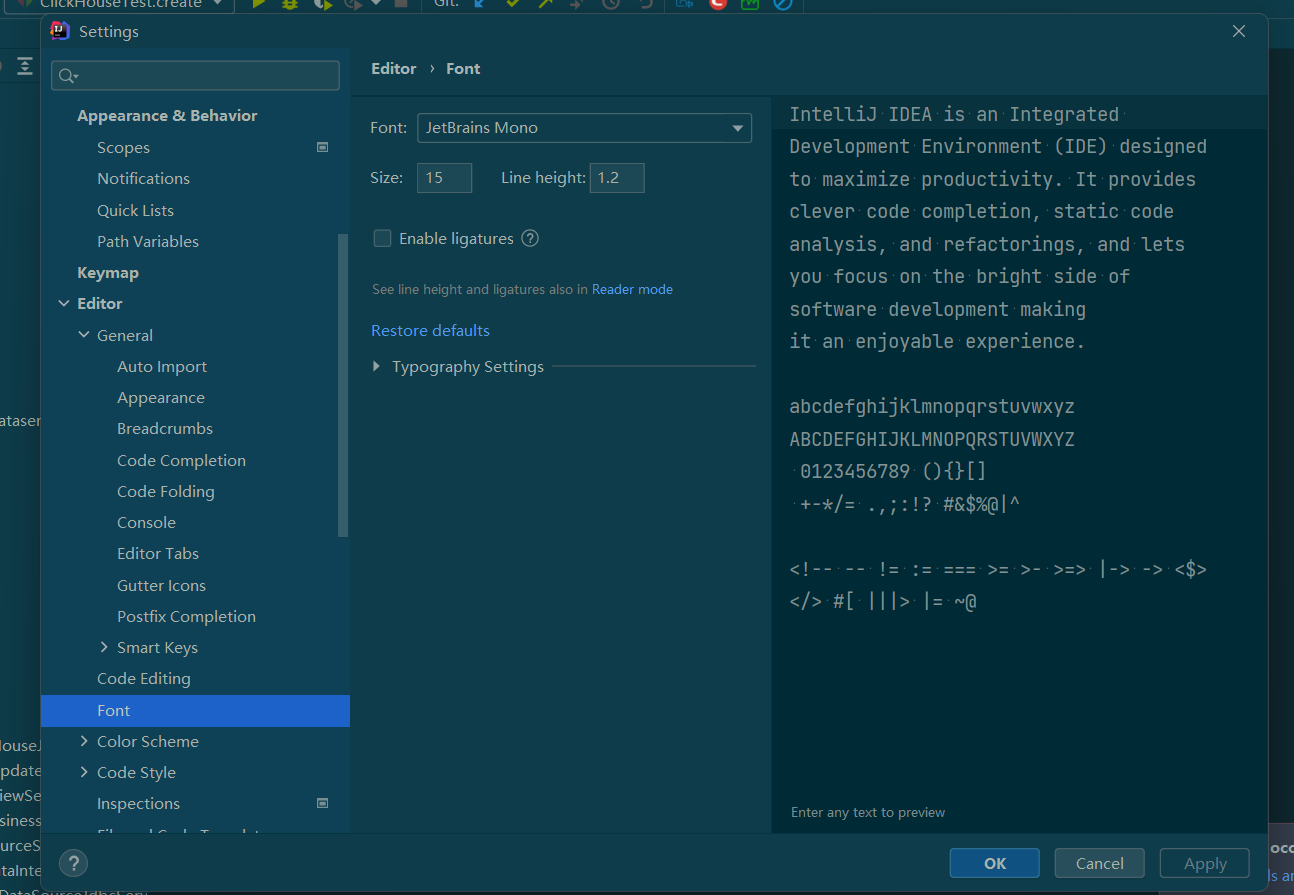
【Idea系列】idea配置
随机推荐
图文手把手教程--ESP32 MQTT对接EMQX本地服务器(VSCODE+ESP-IDF)
A topic of map
Learn to use the basic interface of set and map
Using .NET to simply implement a high-performance clone of Redis (2)
Four ways to traverse a Map
什么是终端特权管理
开源一夏|ArkUI如何自定义弹窗(eTS)
无代码平台单项选择入门教程
datax oracle to oracle增量同步
【虹科案例】基于3D相机组装家具
Maple 2022 software installation package download and installation tutorial
js文字转语音播报
LeetCode第三题(Longest Substring Without Repeating Characters)三部曲之三
黑马瑞吉外卖之员工账号的禁用和启用以及编辑修改
SVG 的 path 属性绘制图形
datax oracle to oracle incremental synchronization
sqlilabs less-40
航企纠缠A350安全问题 空客主动取消飞机订单
美摄问答室|美映 VS 美摄云剪辑
八、MFC对话框