当前位置:网站首页>前馈-反馈控制系统设计(过程控制课程设计matlab/simulink)
前馈-反馈控制系统设计(过程控制课程设计matlab/simulink)
2022-06-27 09:38:00 【叶绿体不忘呼吸】
微信公众号:创享日记
发送关键词:前馈反馈
免费获取完整报告+matlab/simulink仿真源文件
一、课程设计任务分析
已知过程的传递函数为 G_PC (s)=(s+1)/(s+2)(2s+3) ,G_PD (s)=5/(s+2) ,控制器使用PID规律。试设计一个前馈-反馈控制系统中前馈调节器的数学模型G_ff,并用SIMULINK和MATLAB程序仿真实现。当扰动信号F(s)分别用单位阶跃信号和SINS信号,系统设定值R(s)为1时,调整PID参数,既能克服干扰F对系统的影响,又能跟踪设定值R的变化。(假设检测变送环节的传递函数为1)。
1、设计要求
①给出前馈控制器的模型表达式;
②提供系统仿真图;
③给出设计完成后系统的调试步骤说明,实验结果的说明及实验数据分析;
④若控制通道存在大纯滞后,即G_PC (s)=(s+1)/(s+2)(2s+3) e^(-10s),控制性能会如何变化?给出改进前馈-反馈孔控制系统结构模型控制方案和仿真分析结果。
⑤撰写实验报告。
2、流程分析
系统中既有针对主要扰动信号进行补偿的前馈控制,又存在对被调量采用反馈控制以克服其他的干扰信号,这样的系统就是前馈-反馈控制系统。前馈控制系统的作用是对主要的干扰信号进行补偿,可以针对主要干扰信号,设置相应的前馈控制器。引入反馈控制是为了是系统能够克服所有的干扰信号对被调量的影响,除了己知的干扰信号以外,系统中还存在其他的干扰信号,这些扰动信号对系统的影响比较小,有的是能够考虑到的,有的无法考虑或是无法测量,都通过反馈控制来克服。系统中需要测量的信号既有被调量又有扰动信号。
二、对象特性分析
由题目可知,系统的控制通道传递函数为G_PC (s)=(1/6(s+1))/(1/2 s+1)(2/3 s+1) ,扰动通道传递函数为G_PD (s)=5/(s+2)。因此该被控过程为自衡的多容过程,也就是当输入发生变化时,无需外加任何控制作用,过程能够自发地趋于新的平衡状态。
被控过程的静态增益(放大系数)K=1/6,即输出变化量与输入变化量之比,易知放大系数较小,过程的控制作用较弱。根据其时间常数T_1=1/2,T_2=2/3,可知控制过程较慢。
干扰通道传递G_PD (s)=5/(s+2),其静态增益K=5/2,可以看出扰动通道的放大系数较大,即较小的扰动就会给系统带来较大的影响,应采用前馈-反馈控制来消除扰动的影响。
三、控制方案设计与仿真
1、系统初始结构
由设计要求可知,控制通道传递函数为G_pc(s)=(s+1)/((s+2)(s+3))和干扰通道传递函数为G_pd(s)=5/(s+2),输入设置为单位阶跃信号,在不加入PID控制器与前馈控制器时,组成简单的单闭环系统,建立出系统的原始结构框图如图4-1所示。
当干扰输入设置为单位阶跃响应信号时,仿真时间设置为20s,在第10s时加入干扰,得到系统仿真波形如图4-2所示。
由图4-2可知,在没有控制器时,输出不能跟随给定,有严重的余差,在干扰加入之后,系统的抗扰性能非常差。
当干扰输入设置为正弦信号时,仿真时间设置为10s,得到系统仿真波形如图4-3所示。
由图4-3可知,系统不仅快速性差,而且在引入正弦信号后无法稳定产生振荡。
2、加入PID控制器后
为系统加入PID控制器来使控制变量维持在设定值上。得到系统仿真结构图4-4所示。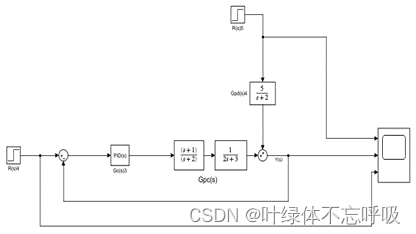
当干扰输入设置为单位阶跃响应信号时,仿真时间设置为10s,在第5s时加入干扰,得到系统仿真波形如图4-5所示。

由图4-5可知,系统可以快速稳定,但是在干扰出现后系统稳定性明显下降,有较大的超调,并且需要更长的时间再次恢复稳定。
当干扰输入设置为正弦信号时,仿真时间设置为20s,在第5s时加入干扰,得到系统仿真波形如图4-6所示。
由图4-6可知,系统在干扰出现时受到影响产生超调而且反馈控制作用有一定的滞后,不能及时消除扰动。
3、加入前馈控制器后
引入前馈控制器来测量进入过程的干扰量并根据测量值立刻产生控制作用改变控制量。此时未加入PID控制器,仅构成前馈控制系统如图4-7所示。
当干扰输入设置为单位阶跃响应信号时,仿真时间设置为20s,在第5s时加入干扰,得到系统仿真波形如图4-8所示。

由图4-8可知,系统在干扰出现时受到干扰影响很小,但系统有较大的余差,不能很好的跟随给定。
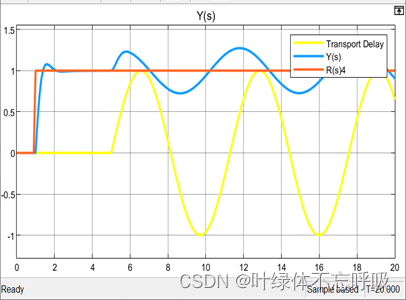
当干扰输入设置为正弦信号时,仿真时间设置为20s,在第5s时加入干扰,得到系统仿真波形如图4-9所示。

由图4-9可知,系统在正弦信号干扰出现时仍然可以保证系统稳定,使系统受到干扰影响很小,但系统有较大的余差,不能很好的跟随给定。
4、前馈-反馈控制系统
(详见报告)
5、系统存在大滞后
(详见报告)
6、史密斯预估补偿器
(详见报告)
四、设计总结与体会
通过此次课程设计,我们小组三人对前馈反馈控制、PID参数整定、滞后环节危害以及史密斯控制有了更深的认识,体会到了小组分工合作的重要性,并将我们在课本所学的知识应用到实际中。在这个过程中,我们也遇到了很多问题,很多次都无法调到理想的PID控制器参数,通过查询资料,明白了Simulink可以进行PID自整定。了解了这一点,我们摒弃了传统的整定参数方法,使用Simulink Library Browser中的Continuous模组中的PID controller自带的Tuner功能来完成PID参数的自动整定。这让我们对于MATLAB使用有了更深刻的认识。
尽管PID参数整定问题解决了,但刚开始输出波形结果不是特别理想。在这个过程中,我们小组三人认真讨论并通过曲线对比分析原因所在,把每一处可能出现的问题的地方细致地的检查,各尽所能,最终取得了良好的控制效果。这个过程,我们不仅仅学习了新知识,巩固了所学的知识,更锻炼了我们的思维能力与团队合作能力,这或许是课程设计的魅力所在。
边栏推荐
- E+h secondary meter repair pH transmitter secondary display repair cpm253-mr0005
- Privacy computing fat offline prediction
- Semi supervised learning—— Π- Introduction to model, temporary assembling and mean teacher
- ucore lab5
- 分布式文件存储系统的优点和缺点
- js中的数组对象
- The markdown plug-in of the browser cannot display the picture
- [vivid understanding] the meanings of various evaluation indicators commonly used in deep learning TP, FP, TN, FN, IOU and accuracy
- HiTek电源维修X光机高压发生器维修XR150-603-02
- JS 文件上传下载
猜你喜欢
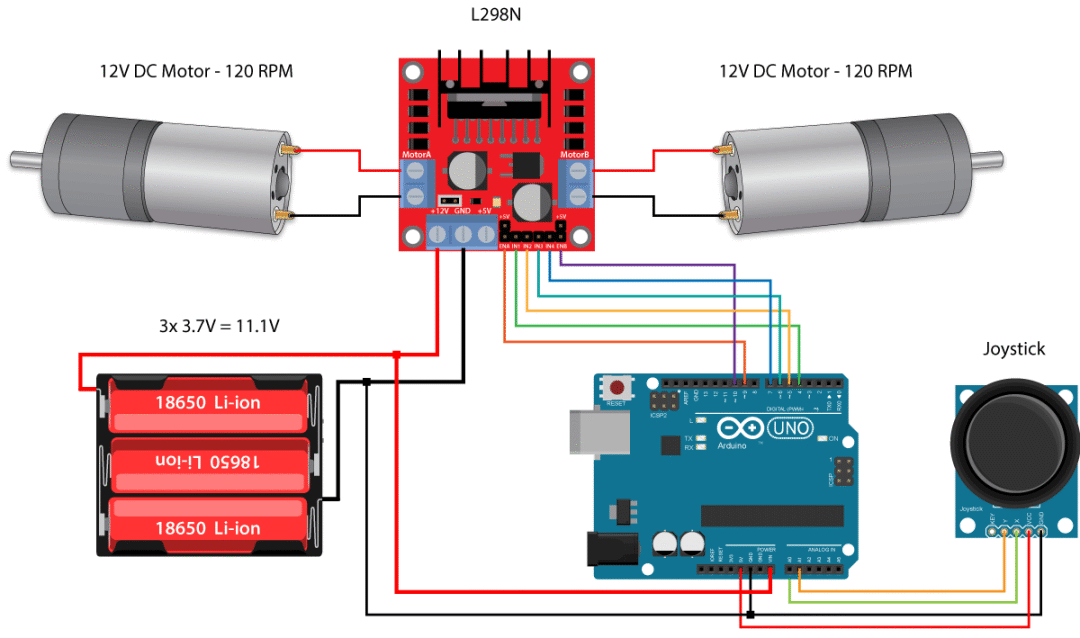
Principle and application of the most complete H-bridge motor drive module L298N
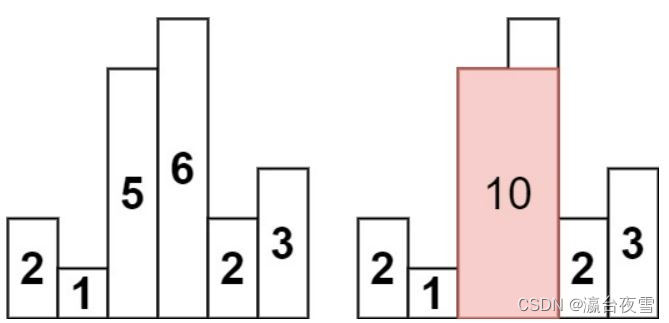
The largest rectangle in the bar graph of force buckle 84
![[registration] infrastructure design: from architecture hot issues to industry changes | tf63](/img/75/b83aaf9610987f695eefe350f8170e.jpg)
[registration] infrastructure design: from architecture hot issues to industry changes | tf63

Preliminary understanding of pytorch

Digital ic-1.9 understands the coding routine of state machine in communication protocol

详解各种光学仪器成像原理
【报名】基础架构设计:从架构热点问题到行业变迁 | TF63

The markdown plug-in of the browser cannot display the picture
There is no doubt that this is an absolutely elaborate project

ucore lab3
随机推荐
Markem imaje马肯依玛士喷码机维修9450E打码机维修
【OpenCV 例程200篇】212. 绘制倾斜的矩形
One week's experience of using Obsidian (configuration, theme and plug-in)
Privacy computing fat offline prediction
【SO官方采访】为何使用Rust的开发者如此深爱它
Rockermq message sending mode
Freemarker
R语言plotly可视化:可视化多个数据集归一化直方图(historgram)并在直方图中添加密度曲线kde、设置不同的直方图使用不同的分箱大小(bin size)、在直方图的底部边缘添加边缘轴须图
Win10 add right-click menu for any file
强化学习中好奇心机制
产品力对标海豹/Model 3,长安深蓝SL03预售17.98万起
Quartz (timer)
详解各种光学仪器成像原理
详细记录YOLACT实例分割ncnn实现
Understand neural network structure and optimization methods
ucore lab5
【报名】基础架构设计:从架构热点问题到行业变迁 | TF63
通俗易懂理解朴素贝叶斯分类的拉普拉斯平滑
运维一线工作常用shell脚本再整理
Use aspese Cells convert Excel to PDF