当前位置:网站首页>ROS2系列知识(5):【参数】如何管理?
ROS2系列知识(5):【参数】如何管理?
2022-08-01 16:43:00 【无水先生】
一、参数基本概念
参数是节点的配置值。您可以将参数视为节点设置。节点可以将参数存储为整数、浮点数、布尔值、字符串和列表。在 ROS 2 中,每个节点都维护自己的参数。有关参数的更多背景信息,请参阅概念文档。
二、开启演示方式
启动两个 turtlesim 节点,/turtlesim 和 /teleop_turtle。
打开一个新终端并运行:
ros2 run turtlesim turtlesim_node打开另一个终端并运行:
ros2 run turtlesim turtle_teleop_key2 ros2 参数列表
要查看属于您的节点的参数,请打开一个新终端并输入命令:
ros2 param list您将看到节点命名空间 /teleop_turtle 和 /turtlesim,后面是每个节点的参数:
/teleop_turtle:
qos_overrides./parameter_events.publisher.depth
qos_overrides./parameter_events.publisher.durability
qos_overrides./parameter_events.publisher.history
qos_overrides./parameter_events.publisher.reliability
scale_angular
scale_linear
use_sim_time
/turtlesim:
background_b
background_g
background_r
qos_overrides./parameter_events.publisher.depth
qos_overrides./parameter_events.publisher.durability
qos_overrides./parameter_events.publisher.history
qos_overrides./parameter_events.publisher.reliability
use_sim_time
每个节点都有参数use_sim_time;这不是turtlesim独有的。
根据它们的名称,看起来 /turtlesim 的参数使用 RGB 颜色值确定了 turtlesim 窗口的背景颜色。
要确定参数的类型,可以使用 ros2 param get。
ros2 param get3 参数信息显示语句
显示当前参数的类型和值,用下列语句:
ros2 param get <node_name> <parameter_name>让我们找出 /turtlesim 的参数 background_g 的当前值:
ros2 param get /turtlesim background_g返回:
Integer value is: 86
现在您知道 background_g 包含一个整数值。
如果您在 background_r 和 background_b 上运行相同的命令,您将分别获得值 69 和 255。
4 设置参数值
本文指出,设定参数有两个方式:
- 用set命令运行中改变
- 在服务调用时传入
在运行中改变参数值,用如下指令:
ros2 param set <node_name> <parameter_name> <value>4.1 这里我们改变 /turtlesim的背景颜色:
ros2 param set /turtlesim background_r 150返回执行后结果:
Set parameter successful
目标的背景颜色已经改变如下:

4.2 在服务请求携带参数(产生一个新海龟例)
现在让我们通过调用 /spawn 并输入参数来生成一个新的海龟。在命令行的服务调用中输入 <arguments> 需要采用 YAML 语法。
命令如下:
ros2 service call /spawn turtlesim/srv/Spawn "{x: 2, y: 2, theta: 0.2, name: ''}"您将获得正在发生的这种方法请求信息,然后是服务响应:
requester: making request: turtlesim.srv.Spawn_Request(x=2.0, y=2.0, theta=0.2, name='') response: turtlesim.srv.Spawn_Response(name='turtle2')
您的 turtlesim 窗口将立即更新新生成的海龟:

5 ros2 参数转储
您可以使用以下命令查看节点的所有当前参数值:
ros2 param dump <node_name>该命令默认打印到标准输出 (stdout),也可以将参数值重定向到文件中以保存。要将您当前的 /turtlesim 参数配置保存到文件 turtlesim.yaml 中,请输入命令:
ros2 param dump /turtlesim > turtlesim.yaml您将在运行 shell 的工作目录中找到一个新文件。如果打开此文件,您将看到以下内容:
/turtlesim:
ros__parameters:
background_b: 255
background_g: 86
background_r: 150
qos_overrides:
/parameter_events:
publisher:
depth: 1000
durability: volatile
history: keep_last
reliability: reliable
use_sim_time: false
如果您想在将来重新加载具有相同参数的节点,则转储参数会派上用场。
6 ros2 参数加载
您可以使用以下命令将参数从文件加载到当前运行的节点:
ros2 param load <node_name> <parameter_file>要将使用 ros2 param dump 生成的 turtlesim.yaml 文件加载到 /turtlesim 节点的参数中,请输入命令:
ros2 param load /turtlesim turtlesim.yaml
您的终端将返回消息:
Set parameter background_b successful
Set parameter background_g successful
Set parameter background_r successful
Set parameter qos_overrides./parameter_events.publisher.depth failed: parameter 'qos_overrides./parameter_events.publisher.depth' cannot be set because it is read-only
Set parameter qos_overrides./parameter_events.publisher.durability failed: parameter 'qos_overrides./parameter_events.publisher.durability' cannot be set because it is read-only
Set parameter qos_overrides./parameter_events.publisher.history failed: parameter 'qos_overrides./parameter_events.publisher.history' cannot be set because it is read-only
Set parameter qos_overrides./parameter_events.publisher.reliability failed: parameter 'qos_overrides./parameter_events.publisher.reliability' cannot be set because it is read-only
Set parameter use_sim_time successful
重要提示:只读参数只能在启动时修改,之后不能修改,这就是“qos_overrides”参数出现警告的原因。
7 节点启动时加载参数文件
要使用您保存的参数值启动同一个节点,请使用:
ros2 run <package_name> <executable_name> --ros-args --params-file <file_name>这与你启动turtlesim 时使用的命令相同,添加了标志--ros-args 和--params-file,后跟要加载的文件。
停止正在运行的 turtlesim 节点,以便您可以尝试使用保存的参数重新加载它,使用:
ros2 run turtlesim turtlesim_node --ros-args --params-file turtlesim.yamlturtlesim 窗口应该像往常一样出现,但带有您之前设置的紫色背景。
在这种情况下,参数在启动时被修改,因此指定的只读参数也将生效。
8 总结
ROS2的参数机制,与ROS1有重大不同。ROS2的参数不再是【全局变量】、【参数服务】的概念,而是所有参数都归属于具体节点,访问的时候一定是带节点namespace进行访问。
边栏推荐
- C # Excel helper classes
- Winform的UI帮助类——部分组件会使用到DevExpress组件
- [Dark Horse Morning Post] Hu Jun's endorsement of Wukong's financial management is suspected of fraud, which is suspected to involve 39 billion yuan; Fuling mustard responded that mustard ate toenails
- 2022年深圳市促进大健康产业集群高质量发展的若干措施
- C#的DataTable帮助类
- 请问数据库中报错信息如下,mongoshake 有什么配置的方式解决这种大消息问题吗?
- MySQL加锁案例分析
- MySQL's maximum recommended number of rows is 2000w, is it reliable?
- 清华教授发文劝退读博:我见过太多博士生精神崩溃、心态失衡、身体垮掉、一事无成!...
- mysql源码分析——聚簇索引
猜你喜欢

Ant discloses the open source layout of core basic software technology for the first time
蚂蚁首次披露核心基础软件技术开源版图
Complete knapsack problem to find the number of combinations and permutations
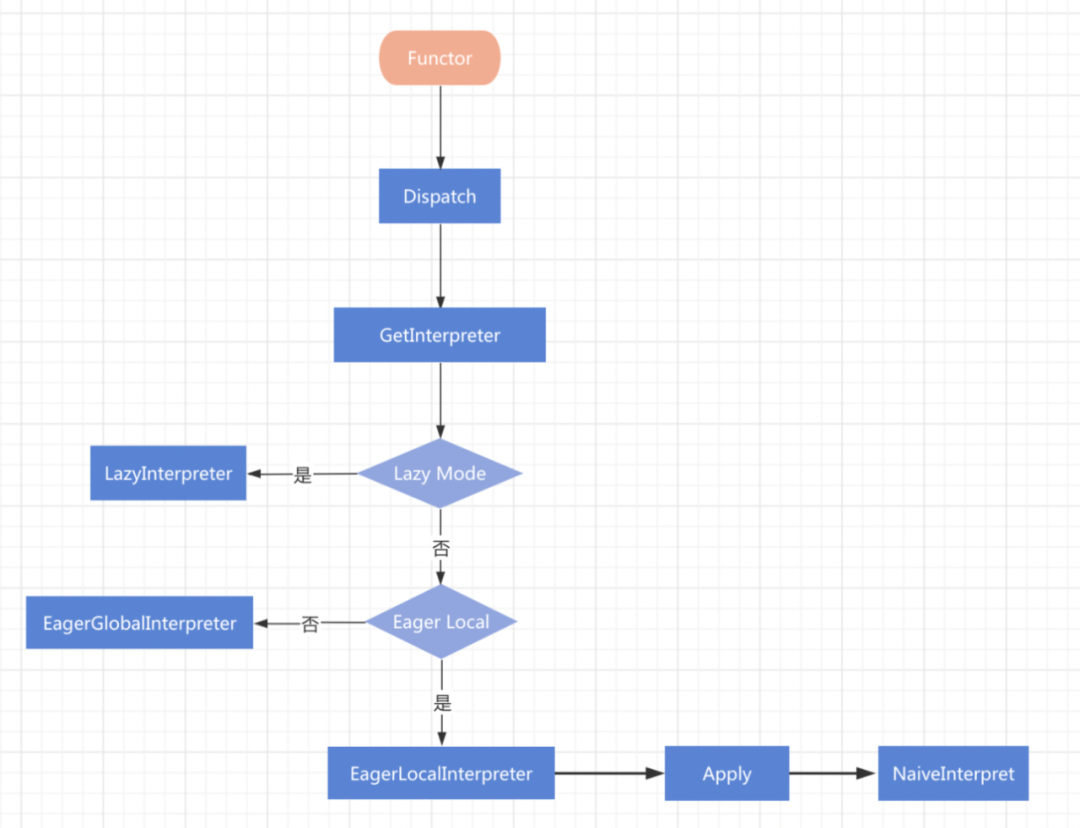
OneFlow源码解析:Op、Kernel与解释器
月薪12K,蝶变向新勇往直前,我通过转行软件测试实现月薪翻倍...

泰国 好产品推荐!2022年最好的胶原蛋白评测有哪些? 喝出健康和美丽适合需要改善肌肤
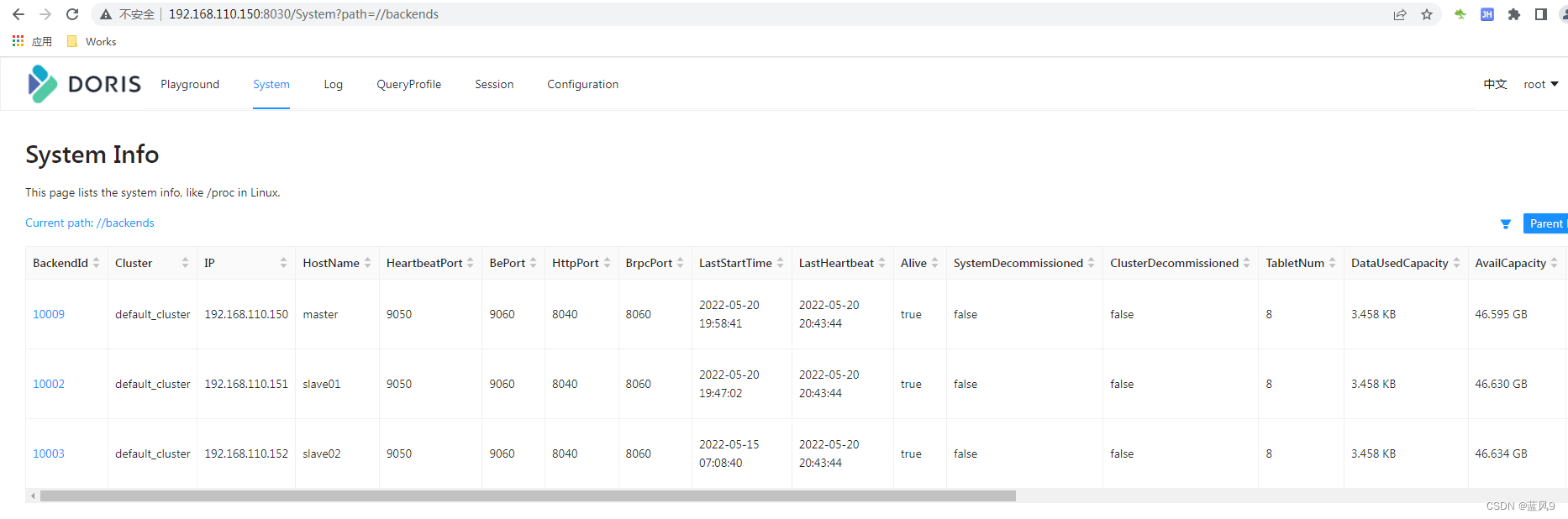
05 doris 集群搭建
Vulnhub靶机:HARRYPOTTER_ NAGINI

ECCV 2022 | Poseur:你以为我是姿态估计,其实是目标检测哒
阿里官方 Redis 开发规范
随机推荐
AntDB数据库亮相24届高速展,助力智慧高速创新应用
重庆银河证券股票开户安全吗,是正规的证券公司吗
【R语言】对图片进行裁剪 图片批量裁剪
参观首钢园
14年测试人最近的面试经历,值得借鉴√
1个月写900多条用例,2线城市年薪33W+的测试经理能有多卷?
【paper】Cam2BEV论文浅析
中国驻西班牙使馆再次提醒留学人员注意暑期安全
【Unity,C#】哨兵射线触发器模板代码
短剧正在抢长剧的生意
06 redis 集群搭建
TiFlash 存储层概览
泰国 好产品推荐!2022年最好的胶原蛋白评测有哪些? 喝出健康和美丽适合需要改善肌肤
[Dark Horse Morning Post] Hu Jun's endorsement of Wukong's financial management is suspected of fraud, which is suspected to involve 39 billion yuan; Fuling mustard responded that mustard ate toenails
块级元素、行内元素、行内块元素
探讨if...else的替代方案
MySQL INTERVAL Keyword Guidelines
在码云拉取代码后,调整了seata版本1.5.2。出现如下异常。是因为数据库表缺少字段导致的吗?
LeetCode第 303 场周赛
直播app开发,是优化直播体验不得不关注的两大指标