当前位置:网站首页>Chuantu microelectronics ca-if1051 can-fd transceiver
Chuantu microelectronics ca-if1051 can-fd transceiver
2022-06-25 07:34:00 【TEL-15286334923】
01 Product overview
This kind of CAN Transceivers are designed for high speed CAN Design for application , All devices support classic CAN and 5Mbps CAN FD, Under load CAN Faster data rates can be achieved in the network . The device has a silent mode , Common mode input voltage can reach ±30 V, among “H” Suffix model bus fault protection up to ±70V, Not “H” The suffix model bus fault protection is ±58V. The device contains many protection functions , To improve the device and CAN The stability of . At present SOIC8 Package size .
CA-IF1051 CAN Transceiver selection table
Item number | Whether it has level conversion function | Communications | rate (Mbps) | Common mode input voltage | Bus fault protection | HBM ESD Other pins | HBM ESD Bus pin | Operating voltage range | Temperature range | Package form |
CA-IF1051HS | no | Half duplex | 5 | -30~30 | -70~70 | 4 | 6 | 4.5~5.5 | -55~125 | SOIC8 |
CA-IF1051S | no | Half duplex | 5 | -30~30 | -58~58 | 4 | 8 | 4.5~5.5 | -55~125 | SOIC8 |
All data are only for reference during preliminary model selection , Please refer to the product manual for formal model selection .
02 Logic side application features
CA-IF1051 Of TXD The pin is receiving CAN Controller TTL Peacetime , Greater than 2V The level of will be recognized as high , Less than 0.8V The level of will be recognized as low level ;RXD The output high level of the pin is greater than 4V, The low level is less than 0.4V, accord with CAN Controller level standard .
03 Bus side differential output voltage
Due to the presence of current and resistance on the bus , The differential level will be attenuated after long line transmission , The higher the differential output level, the better , The greater the pressure difference, the easier it is to identify the receiving end ; But if the difference level is too large , It will cause excessive current flowing through the matching resistance , Cause unnecessary power consumption , The electromagnetic interference of a single device will also be strengthened .

So on the whole , Appropriate bus differential output voltage can be compatible with power consumption and transmission distance , The output voltage is too high , This will lead to an increase in power consumption , But the transmission distance can be longer , Low output voltage , Reduced power consumption , The electromagnetic interference of single equipment is also reduced , But it will also lead to shorter transmission distance .CA-IF1051S The differential output voltage meets ISO11898-2 standard .

04 Explicit timeout protection
The explicit timeout protection function is mainly used to prevent CAN Bus network due to hardware or software failure TXD Be in for a long time “0” Level state .TXD keep “0” Level means CAN The network is dominant level , All nodes of the whole network cannot send and receive data ,CA-IF1051S Avoid this on the bus through the hardware timing of the transceiver .

05 High common mode voltage input range
as everyone knows , If CAN The bus input voltage common mode range of the transceiver chip is not enough , Will have an impact on communication , Chuantu microelectronics CA-IF1051S The common mode voltage input range is achieved ±30V, So that it can be applied to the worse industrial environment .
06 Timing characteristics
In practice CAN In communication , There will be continuous 5bit Clock not synchronized , The accumulated error reaches the maximum , In this case , The whole system is looking forward to CAN The transceiver can control the error to be small enough , To ensure the integrity of the transmission signal . The test waveform simulating this condition is shown in the figure below , Chuantu microelectronics CA-IF1051S The test data is in accordance with the specifications , Ensure that in this case , The signal waveform at the receiving end will not cause sampling errors due to large deformation .

07 Typical applications
The following figure is the application block diagram of stepping motor controller , utilize STM32 Single chip microcomputer CAN The controller carries out CAN Bus communication .

Single chip microcomputer STM32F103C8T6 Bring their own USB The interface can communicate with the upper computer , With two SPI Interface , One of them SPI The interface is used to read the data of the sensor , the other one SPI Interface selection OLED; Single chip computer through IO To control the motor drive chip ; And then through SPI Interface , Read back the sensor data ; SCM also comes with one CAN Protocol interfaces , This interface can output TTL level , adopt CA-IF1051S Transceiver chip , Connect to CAN On the bus , And others CAN Node communication ; If it is a harsh industrial environment, an isolator can be used to isolate the signal , Consider Sichuan earth microelectronics CA-IS36XX Digital Isolator series with isolated power supply .
边栏推荐
- Can we use function pointers in go- Can we have function pointers in Go?
- Introduction to Sichuan Tuwei ca-is3082w isolated rs-485/rs-422 transceiver
- 从感知机到Transformer,一文概述深度学习简史
- LabVIEW generate application (exe) and installer
- How comfortable it is to use Taijiquan to talk about distributed theory!
- [batch dos-cmd command - summary and summary] - commands related to Internet access and network communication (Ping, Telnet, NSLOOKUP, ARP, tracert, ipconfig)
- Finally, when you open source the applet ~
- 我与CSDN的一年时光及大学经验分享
- SQL solve select basic statement
- shell小技巧(一百三十四)简单的键盘输入记录器
猜你喜欢

TEMPEST HDMI泄漏接收 1
![[Yu Yue education] engineering testing technology reference of Wenhua University](/img/69/50a8786ea062a541df9e07c1e16db5.jpg)
[Yu Yue education] engineering testing technology reference of Wenhua University

Weimeisi new energy rushes to the scientific innovation board: the annual revenue is 1.7 billion, and the book value of accounts receivable is nearly 400million

用太极拳讲分布式理论,真舒服!
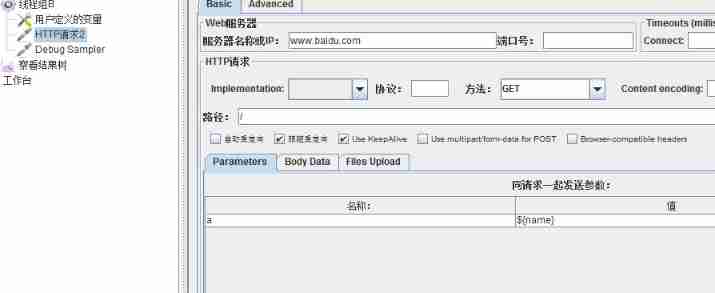
JMeter introduction practice ----- use of global variables and local variables

Introduction to Sichuan Tuwei ca-is3082wx isolated rs-485/rs-422 transceiver
Authentique Photoshop 2022 expérience d'achat partage

What is the difference between norflash and nandflash

Operate cnblogs metaweblog API

【批处理DOS-CMD命令-汇总和小结】-cmd扩展命令、扩展功能(cmd /e:on、cmd /e:off)
随机推荐
Sichuan Tuwei ca-if1051 can transceiver has passed aec-q100 grade 1 certification
ES can finally find brother Wukong!
MySQL - definition and assignment of variables
Ltpowercad II and ltpowerplanner III
MySQL (12) -- Notes on changing tables
14 BS object Node name Name attrs string get node name attribute content
CGLIB动态代理
Conditional grouping with $exists inside $cond
Vscode official configuration synchronization scheme
全局变量&局部变量
【批处理DOS-CMD命令-汇总和小结】-文件与目录操作命令(md、rd、xcopy、dir、cd、set、move、copy、del、type、sort)
【批处理DOS-CMD命令-汇总和小结】-上网和网络通信相关命令(ping、telnet、nslookup、arp、tracert、ipconfig)
正版photoshop2022购买体验经历分享
Global variables & local variables
正版photoshop2022購買體驗經曆分享
Chang Wei (variables and constants) is easy to understand
Notes: [open class] neural network and deep learning -- tensorflow2.0 actual combat [Chinese course]
How to recover redis data from snapshot(rdb file) copied from another machine?
我与CSDN的一年时光及大学经验分享
Cocos learning diary 3 - API acquisition nodes and components