当前位置:网站首页>Cartographer learning records: 3D slam part of cartographer source code (I)
Cartographer learning records: 3D slam part of cartographer source code (I)
2022-06-11 04:42:00 【Ordinary people unwilling to be ordinary】
In the past Official data set and Self recording data set After verification , We can see clearly that cartographer Of 3D Drawing effect , In the next period of time, I will carry out 3D SLAM Read and comment the source code , Make a record here , If a friend finds something wrong , Hope you can tell me in time , So that I can correct it in time .
In terms of personal habits , My strategy for reading the code is to look at the header first , Be familiar with the functions and member variables included in the class , Then the depth first search is used for the implementation files + Breadth first search , Depth first search refers to starting from the main thread , Drill down into the calling function paragraph by paragraph ; Breadth first search mainly refers to presentation form , Put the call obtained by depth first search in this file for convenience of subsequent view , Now I will start with cartographer The upper ROS Encapsulation begins with a step-by-step reading .
One .node_main.cc file
The document is cartographer_ros Body file of , So choose to read the file step by step .
1. The beginning of the file is to call Google Open source command line tag processing library gflags,gflags The main supported parameter types include bool, int32, int64, uint64, double, string etc. , Define parameters through DEFINE_type Macro implementation , The parameters are parameter names , Parameter default values and prompt information , After the definition is completed, you can pass FLAGS_name Access the corresponding parameters , For example, the following “FLAGS_configuration_directory” and “FLAGS_configuration_basename” It corresponds to “configuration_directory” and “configuration_basename”.
DEFINE_bool(collect_metrics, false,
"Activates the collection of runtime metrics. If activated, the "
"metrics can be accessed via a ROS service.");
DEFINE_string(configuration_directory, "",
"First directory in which configuration files are searched, "
"second is always the Cartographer installation to allow "
"including files from there.");
DEFINE_string(configuration_basename, "",
"Basename, i.e. not containing any directory prefix, of the "
"configuration file.");
DEFINE_string(load_state_filename, "",
"If non-empty, filename of a .pbstream file to load, containing "
"a saved SLAM state.");
DEFINE_bool(load_frozen_state, true,
"Load the saved state as frozen (non-optimized) trajectories.");
DEFINE_bool(
start_trajectory_with_default_topics, true,
"Enable to immediately start the first trajectory with default topics.");
DEFINE_string(
save_state_filename, "",
"If non-empty, serialize state and write it to disk before shutting down.");2. From the bottom main Function to read ,main The function mainly initializes , Run and end operations , Initialization includes InitGoogleLogging、ParseCommandLineFlags as well as ros Of init function , Operation is defined in this document run function , The end is ros Of shutdown function ,(ps:ros Front heel :: Represents a call under the global scope ). The initialization and end operations can be realized by roughly understanding the following functions , The key is run function , It is directly related to how to get from ros The upper nodes enter the lower layer bit by bit cartographer Algorithmic level .
int main(int argc, char** argv) {
// initialization Google The logstore of glog
google::InitGoogleLogging(argv[0]);
// call gflags Initialize parameters , The first and second parameters are main Parameter cardinality and parameter value of function , The third parameter is named remove_flags, If false, It means that argv The parameter value of is in accordance with flags separation 、 reorder , If true, gflags Will remove argv Parameters separated in
google::ParseCommandLineFlags(&argc, &argv, true);
// Google The logstore of glog It's provided in CHECK Series of macros , Check whether a condition is true , In the form of CHECK(condition)
// condition If it's not true , Then the following expression information and “check failed:" #condition "”
// And then exit the program , The processing process and after the error FATAL More like
CHECK(!FLAGS_configuration_directory.empty())
<< "-configuration_directory is missing.";
CHECK(!FLAGS_configuration_basename.empty())
<< "-configuration_basename is missing.";
// cartographer The Lord of ROS node "cartographer_node" The initialization
::ros::init(argc, argv, "cartographer_node");
// start-up ROS, An explicit call to this function means that any NodeHandle Start before instance ROS Related threads , Network, etc
::ros::start();
// Use ROS_INFO Conduct glog The output of the message
cartographer_ros::ScopedRosLogSink ros_log_sink;
// Began to run cartographer_ros
cartographer_ros::Run();
// end ROS Related threads , Network, etc
::ros::shutdown();
}3.Run Function flow : utilize LoadOptions Function load configuration -> Take the configuration as CreateMapBuilder Parameter creation map_builder object -> take map_builder And configuration node_options Construct as a parameter node Class object ->node Class object subscription topic Information begins to set the path ->node Class object ends all active tracks and performs global optimization .
Run The important calling functions in the function include CreateMapBuilder()、StartTrajectoryWithDefaultTopics()、FinishAllTrajectories()、RunFinalOptimization(), Some functions of the loading function will not be introduced too much .
// cartographer_ros Namespace
namespace cartographer_ros {
namespace {
void Run() {
// Definition tf Time interval between releases
constexpr double kTfBufferCacheTimeInSeconds = 10.;
// Instantiation tf2_ros::Buffer object tf_buffer
tf2_ros::Buffer tf_buffer{::ros::Duration(kTfBufferCacheTimeInSeconds)};
// Turn on monitoring tf Independent threads of
tf2_ros::TransformListener tf(tf_buffer);
// node_options Structure , Contains map frame name settings 、 receive tf Of timeout Set the time 、 Subgraph publishing cycle settings 、 Pose release cycle settings 、 Path publishing cycle settings
NodeOptions node_options;
// TrajectoryOptions Structure , Contains tracking frame name settings 、 Publish frame name settings 、 Odometer frame name setting 、 Radar scanning quantity setting 、 Point cloud quantity setting, etc
TrajectoryOptions trajectory_options;
// Add ——c++11 Introduced std::tie() Function can connect a variable to a given tuple On , Generate an element type that is all referenced tuple
// take LoadOptions Acquired lua The parameter values in the file are assigned to node_options and trajectory_options
// LoadOptions Function in node_options.h In the definition of
std::tie(node_options, trajectory_options) =
LoadOptions(FLAGS_configuration_directory, FLAGS_configuration_basename);
// MapBuilder Class is cartographer Inside complete SLAM The algorithm class contains the front end (TrajectoryBuilders,scan to submap) With the back end ( Used to find loopback PoseGraph)
// CreateMapBuilder Functions use lua The parameter values set in the file point to MapBuilder Class instantiates an object for subsequent use of related member functions
auto map_builder =
cartographer::mapping::CreateMapBuilder(node_options.map_builder_options);
// Add ——c++11 Introduced std::move Is to transfer the state or ownership of an object from one object to another ,
// It's just a transfer , There is no memory relocation or memory copy, so it can improve the utilization efficiency , improve performance
// Right value references are used to support transfer semantics , Transferring semantics can make resources ( Pile up , System objects, etc ) Transfer from one object to another , This can reduce the creation of unnecessary temporary objects 、 Copy and destroy , Can greatly improve C++ Application performance
// Maintenance of temporary objects in programs ( Create and destroy ) Have a serious impact on performance .
// Node Class initialization , take ROS Of topic Pass in MapBuilder
// Node stay /cartographer_ros/cartographer_ros/cartographer/node.h In the definition of
// Many sensors are subscribed to this constructor topic, Collect sensor data
Node node(node_options, std::move(map_builder), &tf_buffer,
FLAGS_collect_metrics);
// According to the front DEFINE_type Definition determines whether to load pbstream Map file
if (!FLAGS_load_state_filename.empty()) {
node.LoadState(FLAGS_load_state_filename, FLAGS_load_frozen_state);
}
// Use the default topic( stay node_constants.h The file defines the names of related topics ) Start making tracks
if (FLAGS_start_trajectory_with_default_topics) {
node.StartTrajectoryWithDefaultTopics(trajectory_options);
}
// ROS Message callback handler ,ros::spinonce() Indicates that a subscription is called only once , Subsequent procedures can also be continued , If you want to keep subscribing, you need to add a loop , So relative spin() Have flexibility , Frequency and message pool size can be controlled ;
::ros::spin();
// End all active tracks
node.FinishAllTrajectories();
// When all the tracks are over , Perform another global optimization
node.RunFinalOptimization();
// If DEFINE_type Definition save_state_filename Non empty , Just keep it pbstream file
if (!FLAGS_save_state_filename.empty()) {
node.SerializeState(FLAGS_save_state_filename,
true /* include_unfinished_submaps */);
}
}
} // namespace
} // namespace cartographer_rosThe next article will first combine CreateMapBuilder() Functions and node The constructor of , Read it paragraph by paragraph , And then according to StartTrajectoryWithDefaultTopics()、FinishAllTrajectories()、RunFinalOptimization() It's in the right order node The member functions of the class are interpreted in turn , I will also point out some relevant places among the documents for your understanding , I hope that I can constantly correct and make progress in the process of recording .
边栏推荐
- An adaptive chat site - anonymous online chat room PHP source code
- Win10+manjaro dual system installation
- 如何快速寻找STM32系列单片机官方例程
- Mindmanager22 professional mind mapping tool
- Unity music playback Manager
- PHP phone charge recharge channel website complete operation source code / full decryption without authorization / docking with the contract free payment interface
- Unity MonoSingleton
- 关于串口波特率的的记录
- Unity 可缩放地图的制作
- Relational database system
猜你喜欢

Guanghetong 5g module fg650-cn and fm650-cn series are produced in full scale, accelerating the efficient implementation of 5g UWB applications

PHP phone charge recharge channel website complete operation source code / full decryption without authorization / docking with the contract free payment interface

PCB地线设计_单点接地_底线加粗

用万用表检测数码管

Game Mathematics: calculate the points on the plane in the screen points (God's perspective)

USB to 232 to TTL overview

ACTS:如何让缺陷无处藏身?
Product milestones in May 2022
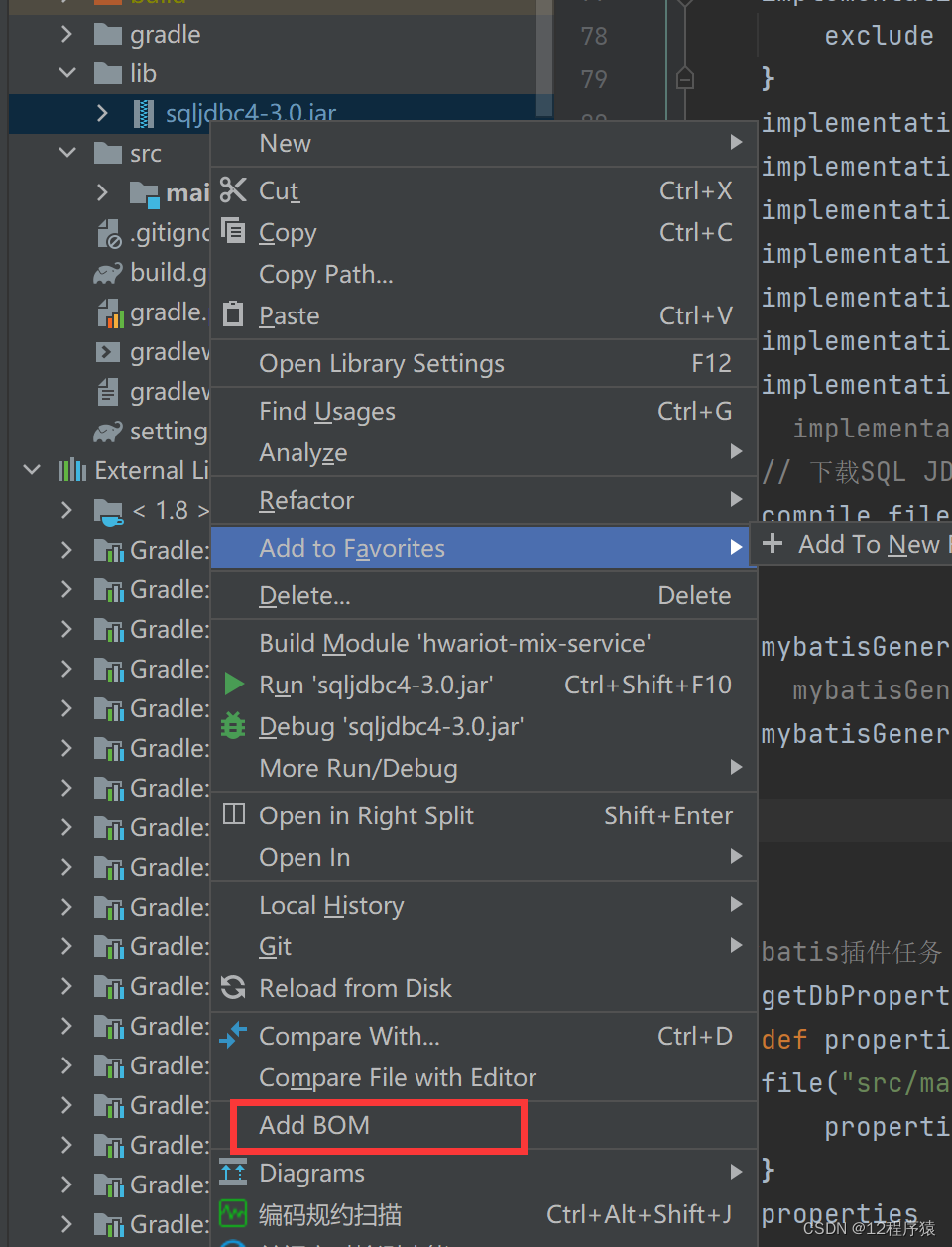
How the idea gradle project imports local jar packages

2022年新高考1卷17题解析
随机推荐
Unity occlusion culling
Guanghetong 5g module fg650-cn and fm650-cn series are produced in full scale, accelerating the efficient implementation of 5g UWB applications
[Transformer]AutoFormerV2:Searching the Search Space of Vision Transformer
Feature engineering feature dimension reduction
Relational database system
Use pathlib instead of OS and os Common methods of path
梅州二恶英实验室建设注意事项分享
Unity 遮挡剔除
How the idea gradle project imports local jar packages
Redis master-slave replication, sentinel, cluster cluster principle + experiment (wait, it will be later, but it will be better)
Zhengda international qihuo: trading market
图的最短路径问题 详细分解版
Unity music playback Manager
Data type conversion and conditional control statements
The third small class discussion on the fundamentals of information and communication
梅州植物组培实验室建设资料整理
Leetcode question brushing series - mode 2 (datastructure linked list) - 24 (m): swap nodes in pairs exchange nodes in the linked list
Leetcode classic guide
Unity 高級背包系統
智慧工地怎样做到数字化转型?