当前位置:网站首页>Pytorch (network model)
Pytorch (network model)
2022-06-26 05:40:00 【Yuetun】
Neural network chicken wings nn.Module

Official website
import torch.nn as nn
import torch.nn.functional as F
class Model(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Conv2d(1, 20, 5)
self.conv2 = nn.Conv2d(20, 20, 5)
def forward(self, x):
x = F.relu(self.conv1(x))# Convolution 、 Nonlinear processing
return F.relu(self.conv2(x))
practice
import torch
import torch.nn as nn
import torch.nn.functional as F
class Dun(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Conv2d(1, 20, 5)
self.conv2 = nn.Conv2d(20, 20, 5)
def forward(self, x):
return x+1
dun=Dun()
x=torch.tensor(1.0)# Transformation types
output=dun(x);# call forward
print(output)# Output
Convolution layer

import torch
input=torch.tensor([[1,2,0,3,1],
[0,1,2,3,1],
[1,2,1,0,0],
[5,2,3,1,1],
[2,1,0,1,1]])
kernel=torch.tensor([[1,2,1],
[0,1,0],
[2,1,0]])
print(input.shape)# Output size
print(kernel.shape)
input=torch.reshape(input,(1,1,5,5))# Type conversion
kernel=torch.reshape(kernel,(1,1,3,3))# Type conversion
print(input)
print(kernel)
print(input.shape)
print(kernel.shape)
# Convolution operation
out= F.conv2d(input,kernel,stride=1)
print(out)
out= F.conv2d(input,kernel,stride=2)
print(out)
# fill
out= F.conv2d(input,kernel,stride=1,padding=1)
print(out)
Output chanel yes 2 when

import torch
import torchvision
from torch import nn
from torch.nn import Conv2d
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
dataset=torchvision.datasets.CIFAR10("./data_set_test",train=False,transform=torchvision.transforms.ToTensor(),download=True)
dataloader= DataLoader(dataset,batch_size=64)
# Convolution class
class Dun(nn.Module):
def __init__(self):
super().__init__()
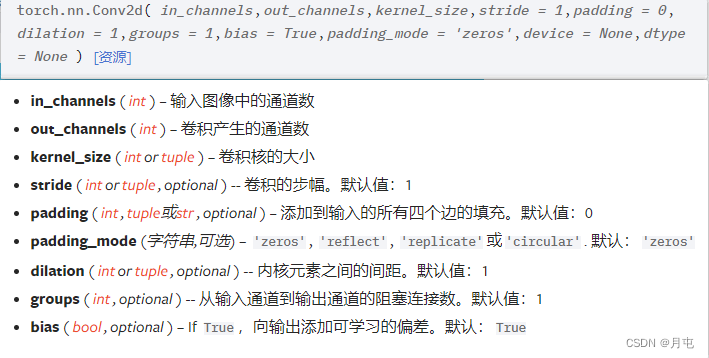
self.conv1=Conv2d(in_channels=3,out_channels=6,kernel_size=3,stride=1,padding=0)
def forward(self,x):
return self.conv1(x)
dun=Dun()
print(dun)
writer= SummaryWriter("./logs")
step=0
# Convolution operation
for data in dataloader:
img,target=data
output=dun(img)
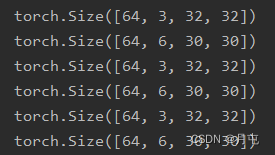
print(img.shape)
print(output.shape)
writer.add_images("input",img,step)
output=torch.reshape(output,(-1,3,30,30))# -1 It will be automatically calculated according to the following values
writer.add_images("output",output,step)
step+=1
writer.close()

Pooling layer
effect : It's like changing from high-definition video to low-definition video 



import torch
from torch import nn
from torch.nn import MaxPool2d
input =torch.tensor([[1,2,0,3,1],
[0,1,2,3,1],
[1,2,1,0,0],
[5,2,3,1,1],
[2,1,0,1,1]],dtype=torch.float32)
input=torch.reshape(input,(-1,1,5,5))
class Dun(nn.Module):
def __init__(self):
super().__init__()
self.maxpool=MaxPool2d(kernel_size=3,ceil_mode=True)# ceil_model false and True The results are consistent with the expectations
def forward(self,inut):
return self.maxpool(input)
dun=Dun()
out=dun(input)
print(out)

The image processing
import torch
import torchvision
from torch import nn
from torch.nn import MaxPool2d
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
dataset=torchvision.datasets.CIFAR10("./data_set_test",train=False,transform=torchvision.transforms.ToTensor(),download=True)
dataloader= DataLoader(dataset,batch_size=64)
class Dun(nn.Module):
def __init__(self):
super().__init__()
self.maxpool=MaxPool2d(kernel_size=3,ceil_mode=True)# ceil_model false and True The results are consistent with the expectations
def forward(self,input):
return self.maxpool(input)
dun=Dun()
step=0
writer=SummaryWriter("logs")
for data in dataloader:
img,target=data
writer.add_images("input",img,step)
output=dun(img)
writer.add_images("output",output,step)
step+=1
writer.close()

Nonlinear activation
The purpose of nonlinear transformation is to introduce nonlinear features , Can better handle information 
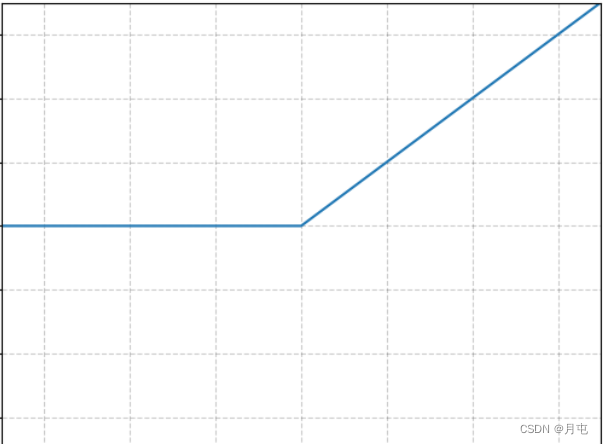
ReLU
import torch
from torch import nn
from torch.nn import ReLU
input= torch.tensor([[1,-0.5],[-1,3]])
input=torch.reshape(input,(-1,1,2,2))
print(input.shape)
class Dun(nn.Module):
def __init__(self):
super().__init__()
self.relu1=ReLU()
def forward(self,input):
return self.relu1(input)
dun=Dun()
output=dun(input)
print(output)

sigmoid

import torch
import torchvision
from torch import nn
from torch.nn import ReLU, Sigmoid
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
dataset=torchvision.datasets.CIFAR10("./data_set_test",train=False,download=True,transform=torchvision.transforms.ToTensor())
dataloader=DataLoader(dataset,batch_size=64)
class Dun(nn.Module):
def __init__(self):
super().__init__()
self.relu1=ReLU()
self.sigmoid=Sigmoid()
def forward(self,input):
return self.sigmoid(input)
dun=Dun()
writer=SummaryWriter("./logs")
step=0
for data in dataloader:
img,target=data
writer.add_images("input",img,global_step=step)
output=dun(img)
writer.add_images("output",output,global_step=step)
step+=1
writer.close()

Linear layer


import torch
import torchvision
from torch import nn
from torch.nn import Linear
from torch.utils.data import DataLoader
dataset=torchvision.datasets.CIFAR10("./data_set_test",train=False,transform=torchvision.transforms.ToTensor(),download=True)
dataloader=DataLoader(dataset,batch_size=64)
class Dun(nn.Module):
def __init__(self):
super().__init__()
self.linear=Linear(196608,10)
def forward(self,input):
return self.linear(input)
dun=Dun()
for data in dataloader:
img,target=data
print(img.shape)
# input=torch.reshape(img,(1,1,1,-1))
input= torch.flatten(img)# Flatten the data on a row , Instead of the above line
print(input.shape)
output=dun(input)
print(output.shape)

Regularization layer
Accelerate the training speed of neural network 
# With Learnable Parameters
m = nn.BatchNorm2d(100)
# Without Learnable Parameters
m = nn.BatchNorm2d(100, affine=False)
input = torch.randn(20, 100, 35, 45)
output = m(input)
Other layers have Recurrent Layers、Transformer Layers、Linear Layers etc.
A simple network model

import torch
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear, Sequential
from torch.utils.tensorboard import SummaryWriter
class Dun(nn.Module):
def __init__(self):
super().__init__()
# 2.
self.model1 = Sequential(Conv2d(3, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 64, 5, padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024, 64),
Linear(64, 10))
# 1.
# self.conv1=Conv2d(3,32,5,padding=2)
# self.maxpool1=MaxPool2d(2)
# self.conv2=Conv2d(32,32,5,padding=2)
# self.maxpool2=MaxPool2d(2)
# self.conv3=Conv2d(32,64,5,padding=2)
# self.maxpool3=MaxPool2d(2)
# self.flatten=Flatten()
# self.linear1=Linear(1024,64)
# self.linear2=Linear(64,10)
def forward(self,x):
x=self.model1(x)
return x
dun=Dun()
# test
input=torch.ones((64,3,32,32))
print(dun(input).shape)
writer=SummaryWriter("./logs")
writer.add_graph(dun,input)
writer.close()


loss function
L1Loss、MSELoss
import torch
from torch.nn import L1Loss
from torch import nn
input=torch.tensor([1,2,3],dtype=torch.float32)
targrt=torch.tensor([1,2,5],dtype=torch.float32)
loss=L1Loss(reduction="sum")# This parameter has sum and mean Two kinds of , The default is mean
print(loss(input,targrt))
loss_mse=nn.MSELoss()
print(loss_mse(input,targrt))

CROSSENTROPYLOSS

import torch
from torch.nn import L1Loss
from torch import nn
x=torch.tensor([0.1,0.2,0.3])
y=torch.tensor([1])
x=torch.reshape(x,(1,3))
loss_cross=nn.CrossEntropyLoss()
print(loss_cross(x,y))

Use
import torchvision
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear, Sequential
from torch.utils.data import DataLoader
dataset=torchvision.datasets.CIFAR10("./data_set_test",train=False,transform=torchvision.transforms.ToTensor(),download=True)
dataloader=DataLoader(dataset=dataset,batch_size=1)
# Classification neural network
class Dun(nn.Module):
def __init__(self):
super().__init__()
# 2.
self.model1 = Sequential(Conv2d(3, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 64, 5, padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024, 64),
Linear(64, 10))
def forward(self,x):
x=self.model1(x)
return x
dun=Dun()
loss=nn.CrossEntropyLoss()
for data in dataloader:
img,target=data
output=dun(img)
print(output)
print(target)
result_loss=loss(output,target)# Loss function estimation
#print(result_loss)
result_loss.backward()# Back propagation
print("ok")
Optimizer
import torch
import torchvision
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Flatten, Linear, Sequential
from torch.utils.data import DataLoader
dataset=torchvision.datasets.CIFAR10("./data_set_test",train=False,transform=torchvision.transforms.ToTensor(),download=True)
dataloader=DataLoader(dataset=dataset,batch_size=1)
# Classification neural network
class Dun(nn.Module):
def __init__(self):
super().__init__()
# 2.
self.model1 = Sequential(Conv2d(3, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 64, 5, padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024, 64),
Linear(64, 10))
def forward(self,x):
x=self.model1(x)
return x
dun=Dun()# Examples of classified neural networks
loss=nn.CrossEntropyLoss() # Loss function
optim=torch.optim.SGD(dun.parameters(),lr=0.01) # Optimizer
# do 20 Time training
for epoch in range(20):
running_loss=0.0
for data in dataloader:
img,target=data
output=dun(img)
result_loss=loss(output,target)# Loss function estimation
optim.zero_grad()# The previous gradient is cleared
#print(result_loss)
result_loss.backward()# Back propagation , Find the gradient of each node
optim.step()# Parameter tuning
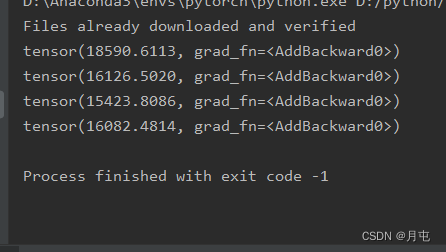
running_loss+=result_loss
print(running_loss)
Network model saving and reading
Model preservation
import torch
import torchvision
from torch import nn
vgg16=torchvision.models.vgg16(pretrained=False)
# Save the way 1( The structure and parameters of the network model are saved )
torch.save(vgg16,"vgg16_method1.pth")
# The way 2: Save the parameters of the model ( In the form of a dictionary )
torch.save(vgg16.state_dict(),"vgg16_method2.pth")
# trap
class Dun(nn.Module):
def __init__(self):
super().__init__()
self.conv1=nn.Conv2d(3,64,kernel_size=3)
def forward(self,x):
return self.conv1(x)
dun=Dun()
torch.save(dun,"dun_method1.pth")
Model loading
import torch
# Save the way 1-》 load
# model=torch.load("vgg16_method1.pth")
# print(model)
# Mode 2 loading , Just dictionary mode
# model=torch.load("vgg16_method2.pth")
# print(model)
## To restore the network model
import torchvision
from torch import nn
vgg16=torchvision.models.vgg16(pretrained=False)
vgg16.load_state_dict(torch.load("vgg16_method2.pth"))
print(vgg16)
# trap
# You need to write the model
class Dun(nn.Module):
def __init__(self):
super().__init__()
self.conv1=nn.Conv2d(3,64,kernel_size=3)
def forward(self,x):
return self.conv1(x)
model=torch.load("dun_method1.pth")
print(model)
边栏推荐
- Serious hazard warning! Log4j execution vulnerability is exposed!
- The news of thunderbolt
- uni-app吸顶固定样式
- 电机专用MCU芯片LCM32F037系列内容介绍
- A new explanation of tcp/ip five layer protocol model
- Security problems in wireless networks and modern solutions
- 工厂方法模式、抽象工厂模式
- Could not get unknown property ‘*‘ for SigningConfig container of type org.gradle.api.internal
- BOM document
- Mise en file d'attente des messages en utilisant jedis Listening redis stream
猜你喜欢

Ribbon负载均衡服务调用

cartographer_ pose_ graph_ 2d

How to ensure the efficiency and real-time of pushing large-scale group messages in mobile IM?

uni-app吸顶固定样式

Navicat如何将当前连接信息复用另一台电脑

Leetcode114. Expand binary tree into linked list

Yunqi lab recommends experience scenarios this week, free cloud learning

【活动推荐】云原生、产业互联网、低代码、Web3、元宇宙……哪个是 2022 年架构热点?...
![[arm] build boa based embedded web server on nuc977](/img/fb/7dc1898e35ed78b417770216b05286.png)
[arm] build boa based embedded web server on nuc977

原型模式,咩咩乱叫
随机推荐
无线网络存在的安全问题及现代化解决方案
Leetcode114. 二叉树展开为链表
写在父亲节前
Use jedis to monitor redis stream to realize message queue function
Pytorch中自己所定义(修改)的模型加载所需部分预训练模型参数并冻结
Command line interface of alluxio
一段不离不弃的爱情
redis探索之布隆过滤器
MySQL数据库-01数据库概述
电机专用MCU芯片LCM32F037系列内容介绍
Redis discovery bloom filter
FindControl的源代码
MySQL source code reading (II) login connection debugging
使用Jedis监听Redis Stream 实现消息队列功能
使用Jenkins执行TestNg+Selenium+Jsoup自动化测试和生成ExtentReport测试报告
工厂方法模式、抽象工厂模式
Last flight
循环位移
pytorch(环境、tensorboard、transforms、torchvision、dataloader)
定位设置水平,垂直居中(多种方法)