当前位置:网站首页>21、 TF coordinate transformation (I): coordinate MSG message
21、 TF coordinate transformation (I): coordinate MSG message
2022-07-28 14:54:00 【Rock magnon】
List of articles
One 、 introduction
In the process of robot movement , Need to sense the orientation of surrounding objects through sensors . Because the sensor and robot are not in the same coordinate system , So we need to transform the coordinate system . stay ROS in , It directly encapsulates the relevant modules : Coordinate transformation (TF)
stay ROS In the system , The object is calibrated through the right-hand coordinate system , As shown in the figure below :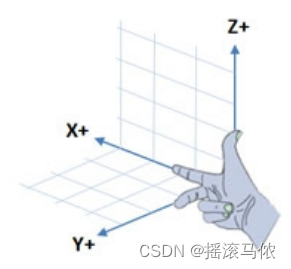
be relative to tf,tf2 More concise and efficient , Common function packs include :
tf2_geometry_msgs: Can be ROS The message is converted to tf2 news .
tf2: Encapsulates common messages of coordinate transformation .
tf2_ros: by tf2 Provides roscpp and rospy binding , Encapsulates the commonly used coordinate transformation API
Two 、 coordinate msg news
2.1 Commonly used msg
- geometry_msgs/TransformStamped: Transmit position information related to different coordinate systems
std_msgs/Header header # Header information uint32 seq #|-- Serial number time stamp #|-- Time stamp string frame_id #|-- coordinate ID string child_frame_id # Of the sub coordinate system id geometry_msgs/Transform transform # Coordinate information geometry_msgs/Vector3 translation # Offset float64 x #|-- X Offset of direction float64 y #|-- Y Offset of direction float64 z #|-- Z The offset in the direction geometry_msgs/Quaternion rotation # Four yuan number float64 x float64 y float64 z float64 w - geometry_msgs/PointStamped: Transmit the information of coordinate points in a coordinate system
std_msgs/Header header # head uint32 seq #|-- Serial number time stamp #|-- Time stamp string frame_id #|-- Of the coordinate system id geometry_msgs/Point point # Point coordinates float64 x #|-- x y z coordinate float64 y float64 z
边栏推荐
猜你喜欢

linux安装redis

C语言库函数getchar()怎么使用

2022 melting welding and thermal cutting examination questions and online simulation examination

The 35 required questions in MySQL interview are illustrated, which is too easy to understand

Simple data analysis using Weka and excel

围绕新市民金融聚焦差异化产品设计、智能技术提效及素养教育

Brief introduction and use of mqtt entry level
VTK annotation class widget vtkborderwidget

Many "double first-class" universities have launched the research guarantee and prediction name!

Store and guarantee rancher data based on Minio objects
随机推荐
Multi merchant mall system function disassembly lecture 17 - platform side order list
Focus on differentiated product design, intelligent technology efficiency improvement and literacy education around new citizen Finance
用 Table 在 SwiftUI 下创建表格
国产数据库的红利还能“吃”多久?
面试官:ThreadLocal使用场景有哪些?内存泄露问题如何避免?
树莓派基础 | 总结记录树莓派学习过程中的一些操作
Swiftui layout - size (bottom)
Use of formdata object, VAR formdata=new formdata()
Excel VBA 免密查看VBE加密代码
Read the introduction tutorial of rainbow
Four basic data types
2022 high altitude installation, maintenance, removal of examination question bank and online simulated examination
Some problems encountered in the development of Excel VBA, solutions, and continuous updates
pix2pix
The third pre class exercise
看了就会的 Rainbond 入门教程
Hand in hand from 0 to a "Nuggets special attention" Google plug-in, 5000 words detailed vue3 responsive principle, the advantages, disadvantages and choices of several cache read-write schemes, flyin
Swiftui layout - size (top)
linux安装mysql
@Solution to DS ('slave') multi data source compatible transaction problem