当前位置:网站首页>[collection] Introduction to basic knowledge of point cloud and functions of point cloud catalyst software
[collection] Introduction to basic knowledge of point cloud and functions of point cloud catalyst software
2022-06-27 05:45:00 【Oxygen technique】
【 A collection 】 Point cloud intelligent processing
This article is from the wechat official account of point cloud catalyst
| 01 | Research progress and Prospect of intelligent classification of point cloud |
| 02 | Point cloud catalysts , Catalyzing your point cloud —— The software is introduced ( On ) |
| 03 | Point cloud catalysts , Catalyzing your point cloud —— The software is introduced ( Next ) |
| 04 | Entity based point cloud intelligent processing catalyzes the industrial application process from point cloud data to information |
| 05 | Point cloud spatial data organization —— Octree |
| 06 | airborne LiDAR Multi echo information analysis of data and its application in filtering |
| 07 | Airborne LIDAR point cloud multi entity multi-level classification method |
| 08 | utilize KD- Research on the method of eliminating airborne radar point cloud gross error by tree |
| 09 | LAS Data structure introduction |
| 10 | Dense UAV LIDAR point cloud data processing and analysis methods and tools popular science series ( One ) |
| 11 | Dense UAV LIDAR point cloud data processing and analysis methods and tools popular science series ( Two ) |
| 12 | Dense UAV LIDAR point cloud data processing and analysis methods and tools popular science series ( 3、 ... and ) |
| 13 | Dense UAV LIDAR point cloud data processing and analysis methods and tools popular science series ( Four ) |
| 14 | Dense UAV LIDAR point cloud data processing and analysis methods and tools popular science series ( 5、 ... and ) |
| 15 | Dense UAV LIDAR point cloud data processing and analysis methods and tools popular science series ( 6、 ... and ) |
| 16 | Airborne laser radar principle and application science ( One ) |
| 17 | Airborne laser radar principle and application science ( Two ) |
| 18 | Airborne laser radar principle and application science ( 3、 ... and ) |
| 19 | Airborne laser radar principle and application science ( Four ) |
| 20 | Airborne laser radar principle and application science ( 5、 ... and ) |
| 21 | Airborne laser radar principle and application science ( 6、 ... and ) |
| 22 | Airborne laser radar principle and application science ( 7、 ... and ) |
| 23 | Airborne laser radar principle and application science ( 8、 ... and ) |
| 24 | Airborne laser radar principle and application science ( Nine ) |
| 25 | Airborne laser radar principle and application science ( Ten ) |
| 26 | Airborne laser radar principle and application science ( 11、 ... and ) |
| 27 | Airborne laser radar principle and application science ( Twelve ) |
| 28 | Characteristics of waveform data and its processing |
| 29 | LiDAR Point cloud data and its processing |
| 30 | airborne LiDAR Characteristics of data |
| 31 | airborne LiDAR The organization of data |
| 32 | airborne LiDAR Technical characteristics |
| 33 | airborne LiDAR Data error source analysis |
| 34 | The influence of laser ranging error on laser foot positioning |
| 35 | 2020 Years of project experience sharing :20 Centimeter thick UAV LIDAR point cloud , Can we build a large-scale digital elevation model of the river ? |
| 36 | PCA/PCC One click ultra-high density UAV in the software LiDAR Point cloud filtering and fine terrain extraction |
| 37 | airborne LiDAR Data system error elimination |
| 38 | airborne Lidar Research on data filtering methods |
| 39 | Analysis of filtering difficulties |
| 40 | Dajiang meditation L1 And point cloud characteristic analysis |
| 41 | The development of laser radar |
01 Research progress and Prospect of intelligent classification of point cloud
Point clouds are currently photogrammetric 、 remote sensing 、 One of the data sources widely used in many fields such as computer vision , Information extraction is point cloud processing 、 Analysis and application of the necessary links . So , Academia has proposed a large number of point cloud information extraction methods . This paper starts with primitive types 、 The extracted features 、 Feature selection and classifier, etc 3 This paper summarizes the research status of point cloud information extraction from three perspectives , The existing problems of point cloud information extraction are summarized 5 Major issues , It points out the of point cloud information extraction 6 There are two main trends , And emphatically introduces “ Point cloud information extraction paradigm integrating multi primitives ”.
02 Point cloud catalysts , Catalyzing your point cloud —— The software is introduced ( On )
Point cloud catalyst is a software package for intelligent post-processing and analysis of point cloud data , It includes point cloud processing and point cloud visualization , This paper introduces the background and characteristics of point cloud catalyst .
03 Point cloud catalysts , Catalyzing your point cloud —— The software is introduced ( Next )
This article introduces the computer configuration required by the point cloud catalyst software and the one click function instructions , Finally, the case study .
This paper mainly introduces the research progress of point cloud processing , Include : Using multiple primitives ( Basic processing unit ) Point cloud processing and analysis - Point clouds with significant differences in characteristics 、 Fine terrain extraction ( Object based filtering method )、 Airborne point cloud single wood segmentation 、 Information extraction and 3D reconstruction 、 Surface growth method for plane accurate extraction , The functional characteristics and case analysis of point cloud catalyst software are introduced .
05 Point cloud spatial data organization —— Octree
Introduce the basic logic and implementation code of octree
06 airborne LiDAR Multi echo information analysis of data and its application in filtering
In this paper, the airborne LiDAR Multi echo characteristics of laser data acquired by the system , This paper expounds the function of multi echo information in revealing the type information of ground objects , The multi echo characteristic is used to reduce the number of laser feet involved in filtering . Experimental proof , The filtering scheme proposed in this paper , Most of the vegetation laser footprints and some of the building laser footprints can be removed in advance , This reduces the amount of data involved in filtering , It can also improve the filtering effect of the filtering algorithm on buildings and vegetation .
07 Airborne LIDAR point cloud multi entity multi-level classification method
Point cloud classification is used for Airborne LIDAR point cloud target extraction 、 The premise of application such as model reconstruction , It has been extensively studied . at present , These studies are classified according to their classification strategies , It can be divided into three categories , That is, point by point classification 、 Point cloud classification based on segmentation 、 Multi entity point cloud classification . Besides , Existing studies have designed a large number of classification features for point clouds , Used to describe point neighborhood and split patch attributes , And then increase the distinguishability of the classification process .
08 utilize KD- Research on the method of eliminating airborne radar point cloud gross error by tree
Gross error elimination is airborne LiDAR One of the key steps in point cloud data post-processing , It has an important impact on the subsequent filtering operation . However, the existing gross error elimination methods have the disadvantages of requiring a lot of manual intervention or poor universality . In this paper, the height histogram is used to eliminate the significant high position 、 On the basis of low gross error , utilize KD- Tree organization airborne LiDAR Point cloud data , By judging the current point and its k The average distance of the nearest points is derived from the adaptive recognition coarse error .
09 LAS Data structure introduction
Airborne radar technology as a high-precision three-dimensional ground object detection means , The corresponding data format is also developing . American Society for Photogrammetry and remote sensing LIDAR Committee and 2003 The standard was issued in LIDAR data format LAS, This article aims to analyze and popularize science LAS Internal storage of data format .
In the field of Surveying and Mapping , Laser radar (LiDAR) Measurement technology is known as "the successor" GPS Another technological revolution after technology . Based on the type of carrying platform , It can be subdivided into onboard 、 airborne 、 ground / The foundation 、 vehicle 、 knapsack 、 On board LiDAR etc. . among , airborne LiDAR Measurement techniques are common , It is mainly used to obtain the high accuracy of the measured area 、 High resolution digital elevation model 、 Digital surface model 、 Power line inspection 、 Forestry resources survey 、 City 3D model making, etc . at present , airborne LiDAR It can be further subdivided into man-machine LiDAR、 Unmanned aerial vehicle (uav) LiDAR, And drones LiDAR It is the hot spot of development in recent years .
At present, on-board LiDAR The cognition of point cloud density also has the following 10 There are still disputes 、 Issues that need to be highlighted , This article will carry on the concrete analysis .
Point cloud catalyst software point cloud visualization effect display
Dense drones LiDAR Point clouds are mapping 、 Land use / Ground cover 、 Smart city 、 Power line inspection 、 Forestry resources investigation and other fields have a wide range of applications , It is mainly reflected in the products that can generate higher resolution 、 More precise target recognition and 3D reconstruction effect .
Dense drones LiDAR Problems faced by point cloud : Large amount of data 、 Lack of talent 、 Most airborne LiDAR The point cloud data processing and analysis tools do not match the dense point cloud well .
15 Airborne laser radar principle and application science ( 6、 ... and )
The laser scanner consists of a laser ranging unit 、 Optical mechanical scanning unit and control device 、 monitoring 、 Recording unit, etc .
16 Airborne laser radar principle and application science ( One )
Airborne lidar (Light Detection AndRanging,LiDAR) Integrated GPS (Global Positioning System,GPS)、 Inertial navigation system (Inertial NavigationSystem,INS)、 Laser ranging system (Laser Scanning Ranging), It can quickly obtain the three-dimensional coordinate information of surface objects . As a real-time acquisition means of three-dimensional spatial information , In the last century 90 A major breakthrough was made in the s , Its unique working mode and data processing method have been widely concerned by experts at home and abroad .
17 Airborne laser radar principle and application science ( Two )
Introduce the development of ranging , Development history of software and hardware , Development history at home and abroad .
18 Airborne laser radar principle and application science ( 3、 ... and )
The main application fields of airborne lidar
19 Airborne laser radar principle and application science ( Four )
airborne LiDAR Hot spots and difficulties in the research of
20 Airborne laser radar Science Series ( 5、 ... and )
System composition of airborne lidar
21 Airborne laser radar principle and application science ( 6、 ... and )
The laser scanner consists of a laser ranging unit 、 Optical mechanical scanning unit and control device 、 monitoring 、 Recording unit, etc .
22 Airborne laser radar principle and application science ( 7、 ... and )
The principle and equation of airborne lidar system for ground positioning
23 Airborne laser radar principle and application science ( 8、 ... and )
Production process of airborne lidar measurement
24 Airborne laser radar principle and application science ( Nine )
Data preprocessing
25 Airborne laser radar principle and application science ( Ten )
Data post-processing
26 Airborne laser radar principle and application science ( 11、 ... and ) Add link description
Data composition
27 Airborne laser radar principle and application science ( Twelve )
Characteristics and processing of intensity information data
28 Characteristics of waveform data and its processing
Processing method of waveform data : The first is the threshold method , The second is the waveform decomposition method , The third is deconvolution
29 LiDAR Point cloud data and its processing
Point cloud data is LiDAR Main data of , Especially in the early days LiDAR Data processing is conducted for point cloud data . airborne LiDAR The distribution of laser foot points is sampled and stored according to time series , Its distribution on the ground is not regular , Its spatial distribution is presented as discrete data “ Point cloud ”. These points , Some points are on the real toposurface , Some are located on different features ( House 、 pipeline 、 Chimney, etc ), Some fell on the vegetation ( Count wood 、 shrub 、 The grass ) etc. .
30 airborne LiDAR Characteristics of data
airborne LiDAR The acquisition of data has the advantage that it is not limited by geographical terrain 、 Less affected by the weather 、 Fast data acquisition speed 、 High accuracy of measurement data 、 The cost of field work is low 、 High degree of automation in data processing .
31 airborne LiDAR The organization of data
Generally airborne LiDAR Large amount of data , How to organize these data effectively directly affects the efficiency and accuracy of data processing . at present , A variety of airborne LiDAR The organization of data , Each data organization has its own advantages and disadvantages .
32 airborne LiDAR Technical characteristics
LiDAR The system is an advanced active sensing system , It uses laser as the carrier of sensing .LiDAR The system itself emits a controlled laser to irradiate the ground and targets on the ground , And then receive the backscatter from the ground target .LiDAR The system is different from multispectral scanning system and aerial camera system , It doesn't depend on the sun , Therefore, it is a system that can obtain ground digital three-dimensional information day and night .
边栏推荐
- RTP 发送PS流工具(已经开源)
- 论文解读(LG2AR)《Learning Graph Augmentations to Learn Graph Representations》
- 代码即数据
- Interview: what are the positioning methods in selenium? Which one do you use most?
- How win 10 opens the environment variables window
- 资深【软件测试工程师】学习线路和必备知识点
- Dual position relay dls-34a dc0.5a 220VDC
- Obtenir le volume du système à travers les plateformes de l'unit é
- How JQ gets the ID name of an element
- jq怎么获取倒数的元素
猜你喜欢

Qt使用Valgrind分析内存泄漏

流媒体协议初探(MPEG2-TS、RTSP、RTP、RTCP、SDP、RTMP、HLS、HDS、HSS、MPEG-DASH)
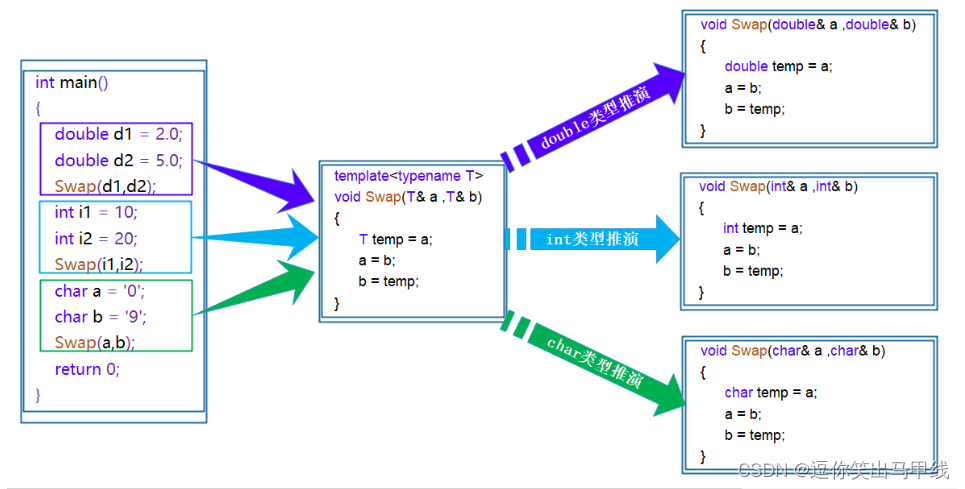
机械转码日记【17】模板,STL简介

AD22 gerber files 点开 gerber steup 界面 有问题 官方解决方法
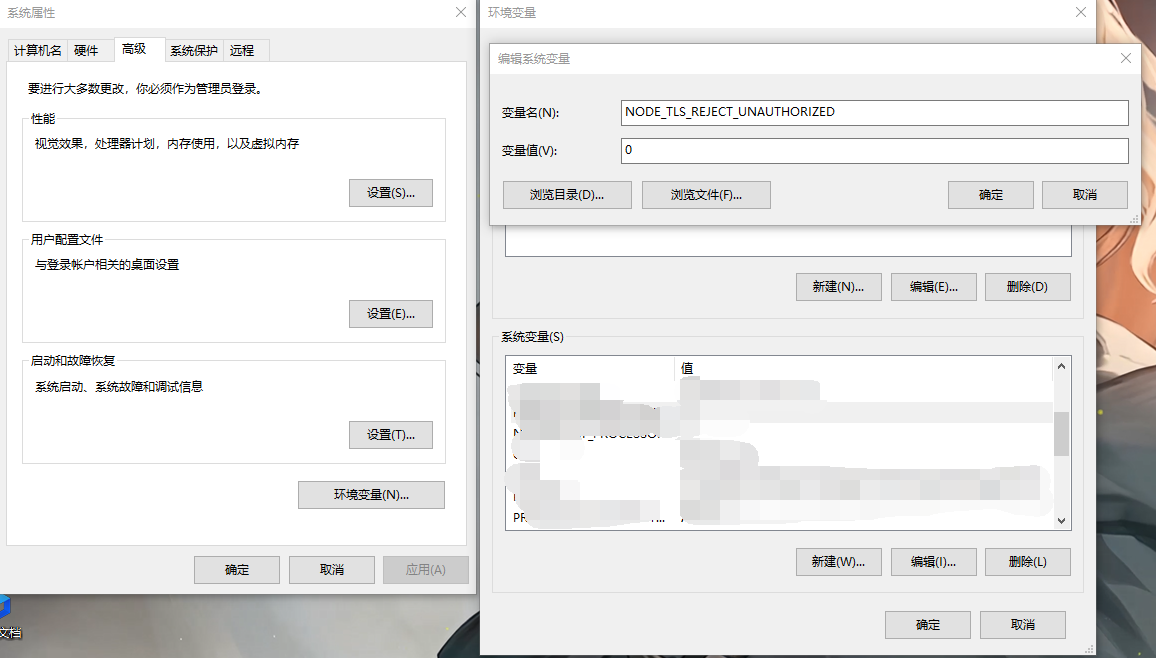
How win 10 opens the environment variables window

RTP sending PS stream tool (open source)

Wechat applet websocket use case

Cognition - how to fill in 2022 college entrance examination volunteers

Codeforces Round #802 (Div. 2)

IAR systems fully supports Centrino technology 9 series chips
随机推荐
RTP 发送PS流工具(已经开源)
函数式 连续式
QListWidget中的内容不显示
Edge loads web pages in IE mode - edge sets ie compatibility
Leetcode99 week race record
Niuke practice 101-c reasoning clown - bit operation + thinking
Opencv实现对象跟踪
Py2neo basic syntax
Get system volume across platforms in unity
Zener diode zener diode sod123 package positive and negative distinction
30个单片机常见问题及解决办法!
Logu p4683 [ioi2008] type printer problem solving
When STM32 turns off PWM output, it is a method to fix IO output at high or low level.
Qt使用Valgrind分析内存泄漏
【Cocos Creator 3.5.1】input.on的使用
[nips 2017] pointnet++: deep feature learning of point set in metric space
Unicast, multicast and broadcast of IP network communication
Neo4j database export
微信小程序WebSocket使用案例
多线程基础部分Part3