当前位置:网站首页>(CVPR 2020) Learning Object Bounding Boxes for 3D Instance Segmentation on Point Clouds
(CVPR 2020) Learning Object Bounding Boxes for 3D Instance Segmentation on Point Clouds
2022-06-25 01:29:00 【Fish Xiaoyu】
Abstract
We put forward a new 、 A general framework that is conceptually simple , Used in 3D Instance segmentation on the point cloud . Our approach is called 3D-BoNet, Follow the multilayer perceptron at each point (MLP) Simple design concept . The framework directly regresses all instances in the point cloud 3D Bounding box , Predict the point level of each instance at the same time (point-level) Mask . It consists of a backbone network and two parallel network branches , be used for 1) Bounding box regression and 2) Dot mask prediction .3D-BoNet It's a single stage 、anchor-free And end-to-end trainable . Besides , Its computational efficiency is very high , Because it is different from the existing methods , It does not require any post-processing steps , For example, non maximum suppression 、 Feature sampling 、 Clustering or voting . A lot of experiments show that , Our approach goes beyond ScanNet and S3DIS Existing work on datasets , At the same time, the computational efficiency is improved by about 10 times . Comprehensive ablation studies have demonstrated the effectiveness of our design .
1 Introduction
Make the machine understand 3D The scene is autopilot 、 Basic prerequisites for augmented reality and robotics . Point cloud, etc 3D The core problem of geometric data includes semantic segmentation 、 Object detection and instance segmentation . In these questions , Instance segmentation has only begun to be solved in the literature . The main obstacle is that the point cloud is essentially disordered 、 Unstructured and uneven . The widely used convolutional neural network needs to 3D Voxelization of point cloud , This results in high computing and memory costs .
The first direct processing 3D The neural algorithm for instance segmentation is SGPN [50], It uses similarity matrix learning to group the features of each point . Similarly ,ASIS [51]、JSIS3D[34]、MASC[30]、3D-BEVIS[8] and [28] Group the same features per point pipeline Apply to segmentation 3D example . Mo Et al. Expressed the instance segmentation as PartNet[32] Point by point feature classification in . However , these proposal-free The learning fragment of method does not have high objectiveness , Because they do not explicitly detect the target boundary . Besides , They inevitably require post-processing steps , For example, mean shift clustering [6] To get the final instance tag , This is computationally onerous . the other one pipeline Is based on proposal Of 3D-SIS[15] and GSPN[58], They usually rely on two-stage training and expensive non maximum inhibition to trim dense targets proposal.
In this paper , We propose an elegant 、 Efficient and novel 3D Instance segmentation framework , By using efficient MLPs Single forward phase of , Loose but unique detection of objects , Then a simple point level binary classifier is used to segment each instance accurately . So , We introduce a new bounding box prediction module and a series of well-designed loss functions to directly learn the target boundary . Our framework is based on proposal and proposal-free There is a big difference in the way , Because we can effectively segment all instances with high goals , But don't rely on expensive and dense targets proposal. Our code and data are available in https://github.com/Yang7879/3D-BoNet get .
chart 1: stay 3D Point cloud for instance segmentation 3D-BoNet frame .

Bounding box prediction branch is the core of our framework . This branch is intended for single forward Each instance in the phase predicts a unique 、 Directionless rectangular bounding box , Instead of relying on predefined spaces anchors Or area proposal The Internet [39]. Pictured 2 Shown , We think it is a rough drawing for the example 3D Bounding boxes are relatively realizable , Because the input point cloud explicitly contains 3D Geometric information , It is very useful before dealing with point level instance segmentation , Because a reasonable bounding box can ensure the high goal of the learning segment . However , The learning example box covers key issues :1) The total number of instances is variable , From 1 To many ,2) There is no fixed order for all instances . These problems pose great challenges to the correct optimization of the network , Because there is no information that can directly link the prediction box to ground truth Tags are linked to monitor the network . however , We showed how to solve these problems gracefully . This box prediction branch simply takes the global eigenvector as input , And directly output a large number of fixed number of bounding boxes and confidence scores . These scores are used to indicate whether the box contains valid instances . To monitor the network , We design a novel bounding box correlation layer , Then there is a multi standard loss function . Give a group ground-truth example , We need to determine which prediction box is best for them . We express this association process as an optimal assignment problem with existing solvers . After the box is best associated , Our multi criteria loss function not only minimizes the Euclidean distance of the pairing box , And it maximizes the coverage of effective points in the prediction frame .
chart 2: Rough example box .
The predicted box is then input into the subsequent point mask prediction branch along with the point and global features , To predict a dot level binary mask for each instance . The purpose of this branch is to classify whether each point in the bounding box belongs to a valid instance or background . Suppose the estimated instance box is quite good , It is possible to obtain an accurate dot mask , Because this branch simply rejects points that do not belong to the detected instance . Random guessing may lead to 50% Amendment .
Overall speaking , Our framework is similar to all existing ones in three aspects 3D Instance segmentation methods are different .1) And proposal-free pipeline comparison , Our approach is through explicit learning 3D Target boundary is used to segment high target instances . 2) And widely used based on proposal Compared with , Our framework doesn't need to be expensive and dense proposal.3) Our framework is very efficient , Because instance level (instance-level) The mask is in a single forward (single-forward) Learning through transmission , No post-processing steps are required . Our main contribution is :
We propose a method in 3D A new framework for instance segmentation on point cloud . The framework is one-stage 、anchor-free And end-to-end trainable , No post-processing steps are required .
We design a novel bounding box correlation layer , Then there is a multi standard loss function to monitor the prediction branch of the box .
We showed that it was right baselines Significant improvements in , Extensive ablation studies have provided an intuitive basis for our design choices .
chart 3:3D-BoNet The general workflow of the framework .

2 3D-BoNet
2.1 Overview
Pictured 3 Shown , Our framework consists of two branches at the top of the backbone network . Given a common N N N Input point cloud of points P \boldsymbol{P} P, namely P ∈ R N × k 0 \boldsymbol{P} \in \mathbb{R}^{N \times k_{0}} P∈RN×k0, among k 0 k_{0} k0 Is the position of each point { x , y , z } \{x, y, z\} { x,y,z} And color { r , g , b } \{r, g, b\} { r,g,b} Number of equal channels , Backbone network extracts local features of points , Write it down as F l ∈ R N × k \boldsymbol{F}_{l} \in \mathbb{R}^{N \times k} Fl∈RN×k, Aggregate a global point cloud feature vector , Write it down as F g ∈ R 1 × k \boldsymbol{F}_{g} \in \mathbb{R}^{1 \times k} Fg∈R1×k, among k k k Is the length of the eigenvector .
The bounding box prediction branch simply converts the global eigenvector F g \boldsymbol{F}_{g} Fg As input , And directly regress a set of predefined and fixed bounding boxes , Write it down as B \boldsymbol{B} B, And the corresponding box fraction , Write it down as B s \boldsymbol{B}_{s} Bs. We use ground truth Bounding box information to monitor this branch . During training , The predicted bounding box B \boldsymbol{B} B and ground truth Box is associated with the input box . This layer is designed to automatically match the unique and most similar prediction bounding box with each ground truth Box is associated with . The output of the association layer is the association index A A A A list of . Index reorganize forecast box , Make each ground truth Box is paired with a unique prediction box , For subsequent loss calculation . Before calculating the loss , The predicted bounding box scores are also reordered accordingly . Then input the reordered prediction boundary box into the multi standard loss function . Basically , This loss function is not only intended to minimize each ground truth Euclidean distance between the frame and the related prediction frame , It also maximizes the coverage of effective points in each prediction frame . Please note that , Both the bounding box correlation layer and the multi criteria loss function are designed only for network training . They are discarded during testing . Final , This branch can directly predict the correct bounding box and box score of each instance .
To predict the of each instance point-level Binary mask , Each prediction box together with the previous local and global features , namely F l \boldsymbol{F}_{l} Fl and F g \boldsymbol{F}_{g} Fg, Is further fed into the dot mask prediction branch . This network branch is shared by all instances of different classes , So it is very light and compact . This category independent approach essentially allows for general segmentation across invisible categories .
2.2 Bounding Box Prediction
Bounding box coding : In the existing target detection network , The bounding box usually consists of the center position and the length of three dimensions [3] Or the corresponding residual [60] And direction . contrary , For the sake of simplicity , We only pass through two min-max Vertex parameterized rectangular bounding box :
{ [ x min y min z min ] , [ x max y max z max ] } \left\{\left[\begin{array}{lll} x_{\min } y_{\min } & z_{\min } \end{array}\right],\left[\begin{array}{lll} x_{\max } & y_{\max } & z_{\max } \end{array}\right]\right\} { [xminyminzmin],[xmaxymaxzmax]}
Nerve layer : Pictured 4 Shown , Global eigenvector F g \boldsymbol{F}_{g} Fg Feed... Through two fully connected layers , among Leaky ReLU As a nonlinear activation function . Then there are two other parallel fully connected layers . One layer outputs one 6H Dimension vector , Then reshape it to H × 2 × 3 H \times 2 \times 3 H×2×3 tensor . H H H Is a predefined and fixed number of bounding boxes , The whole network is expected to have the largest prediction . Another layer outputs a H H H Dimension vector , Heel sigmoid Function to represent the bounding box fraction . The higher the score , The more likely the prediction box contains instances , So this box is more effective .
Bounding box associative layer : Given the previously predicted H H H A bounding box , namely B ∈ R H × 2 × 3 B \in \mathbb{R}^{H \times 2 \times 3} B∈RH×2×3, Use as B ‾ ∈ R T × 2 × 3 \overline{\boldsymbol{B}} \in \mathbb{R}^{T \times 2 \times 3} B∈RT×2×3 Of ground truth Box to monitor the network , Because there is no predefined in our framework anchors Each prediction box can be traced back to the corresponding ground truth box . Besides , For each input point cloud P \boldsymbol{P} P,ground truth box T T T The number of is different , And usually with a predefined number H H H Different , Although we can safely assume a predefined number of all input point clouds H ≥ T H \geq T H≥T. Besides , Prediction box or ground truth Boxes have no box order .
chart 4: The architecture of the bounding box regression branch . Before calculating the multi standard loss , Predicted H H H Boxes and T T T individual ground truth Box best Association .

Optimal correlation formula : In order to B \boldsymbol{B} B The unique prediction bounding box in B ‾ \overline{\boldsymbol{B}} B Each ground truth Box is associated with , We express this correlation process as an optimal allocation problem . Formally , Give Way A A A Is a Boolean incidence matrix , among A i , j = 1 \boldsymbol{A}_{i, j}=1 Ai,j=1, If and only if i i i A prediction box is assigned to the j j j individual ground truth box . A A A It is also called correlation index in this paper . Make C C C For the connection cost matrix , among C i , j \boldsymbol{C}_{i, j} Ci,j It means that the i i i The prediction box is assigned to the j j j individual ground truth Framed cost. Basically ,cost C i , j \boldsymbol{C}_{i, j} Ci,j Indicates the similarity between two boxes ;cost The lower the , The more similar the two boxes are . therefore , The problem of bounding box association is to find the total cost Minimum optimal allocation matrix A A A:
A = arg min A ∑ i = 1 H ∑ j = 1 T C i , j A i , j subject to ∑ i = 1 H A i , j = 1 , ∑ j = 1 T A i , j ≤ 1 , j ∈ { 1.. T } , i ∈ { 1.. H } ( 1 ) \boldsymbol{A}=\underset{\boldsymbol{A}}{\arg \min } \sum_{i=1}^{H} \sum_{j=1}^{T} \boldsymbol{C}_{i, j} \boldsymbol{A}_{i, j} \quad \text { subject to } \sum_{i=1}^{H} \boldsymbol{A}_{i, j}=1, \sum_{j=1}^{T} \boldsymbol{A}_{i, j} \leq 1, j \in\{1 . . T\}, i \in\{1 . . H\} \quad\quad\quad\quad(1) A=Aargmini=1∑Hj=1∑TCi,jAi,j subject to i=1∑HAi,j=1,j=1∑TAi,j≤1,j∈{ 1..T},i∈{ 1..H}(1)
In order to solve the above optimal correlation problem , The existing Hungarian Algorithm [20; 21] application . Incidence matrix calculation : In order to evaluate the i i i Prediction box and j j j individual ground truth Similarity between , A simple and intuitive criterion is two pairs of minima - The Euclidean distance between the largest vertices . However , It's not the best . Basically , We want the prediction box to contain as many valid points as possible . Pictured 5 Shown , The input point cloud is usually sparse , And in 3D Uneven distribution in space . For the same ground truth box #0( Blue ), Candidate box #2( Red ) Considered to be better than the candidate box #1( black ) It's much better , Because the box #2 There are more effective points and #0 overlap . therefore , In the calculation cost matrix C C C when , The coverage of effective points shall be included . In this paper , We consider the following three criteria :
chart 5: Sparse input point cloud .

Algorithm 1 An algorithm for calculating the probability of points in the prediction frame . H H H Yes prediction bounding box B \boldsymbol{B} B The number of , N N N It's point cloud P \boldsymbol{P} P Points in , θ 1 \theta_{1} θ1 and θ 2 \theta_{2} θ2 Is a hyperparameter of numerical stability . We use... In all our implementations θ 1 = 100 \theta_{1} = 100 θ1=100, θ 2 = 20 \theta_{2} = 20 θ2=20.
The above two cycles are for illustration only . They are easily replaced by standard and efficient matrix operations .

(1) Euclidean distance between vertices . Formally , The first i i i A prediction box B i \boldsymbol{B}_{i} Bi And the j j j individual ground truth box B ‾ j \overline{\boldsymbol{B}}_{j} Bj The cost between is calculated as follows :
C i , j e d = 1 6 ∑ ( B i − B ‾ j ) 2 ( 1 ) \boldsymbol{C}_{i, j}^{e d}=\frac{1}{6} \sum\left(\boldsymbol{B}_{i}-\overline{\boldsymbol{B}}_{j}\right)^{2} \quad\quad\quad\quad(1) Ci,jed=61∑(Bi−Bj)2(1)
(2) Point on the soft Intersection-over-Union. Given input point cloud P \boldsymbol{P} P And the j j j individual ground truth Instance box B ‾ j \overline{\boldsymbol{B}}_{j} Bj, You can get one directly hard-binary vector q ‾ j ∈ R N \overline{\boldsymbol{q}}_{j} \in \mathbb{R}^{N} qj∈RN To indicate whether each point is in the box , among ’1’ It means that the point is inside , It's outside “0”. However , For the same input point cloud P \boldsymbol{P} P Specific section of i i i A prediction box , Due to the discrete operation , Get similar directly hard-binary The vector will cause the frame to be nondifferentiable . therefore , We introduce a differentiable but simple algorithm 1 To get a similar but soft-binary vector q i \boldsymbol{q}_{i} qi, be called point-in-pred-box-probability, All of these values are in ( 0 , 1 ) (0, 1) (0,1) Within the scope of . The deeper the corresponding point is in the box , The higher the value . The farther the point , The smaller the value. . Formally , The first i i i Prediction box and j j j individual ground truth Soft cross joint between frames (sIoU)cost The definition is as follows :
C i , j s I o U = − ∑ n = 1 N ( q i n ∗ q ˉ j n ) ∑ n = 1 N q i n + ∑ n = 1 N q ˉ j n − ∑ n = 1 N ( q i n ∗ q ˉ j n ) ( 3 ) \boldsymbol{C}_{i, j}^{s I o U}=\frac{-\sum_{n=1}^{N}\left(q_{i}^{n} * \bar{q}_{j}^{n}\right)}{\sum_{n=1}^{N} q_{i}^{n}+\sum_{n=1}^{N} \bar{q}_{j}^{n}-\sum_{n=1}^{N}\left(q_{i}^{n} * \bar{q}_{j}^{n}\right)} \quad\quad\quad\quad(3) Ci,jsIoU=∑n=1Nqin+∑n=1Nqˉjn−∑n=1N(qin∗qˉjn)−∑n=1N(qin∗qˉjn)(3)
among q i n q_{i}^{n} qin and q ˉ j n \bar{q}_{j}^{n} qˉjn yes q i \boldsymbol{q}_{i} qi and q ‾ j \overline{\boldsymbol{q}}_{j} qj Of the n It's worth .
(3) Cross entropy fraction . Besides , We also considered q i \boldsymbol{q}_{i} qi and q ‾ j \overline{\boldsymbol{q}}_{j} qj The cross entropy score between . And prefer tighter frames sIoU cost Different , This score represents the confidence that the predicted bounding box can contain as many effective points as possible . It prefers larger and more inclusive boxes , And formally defined as :
C i , j c e s = − 1 N ∑ n = 1 N [ q ˉ j n log q i n + ( 1 − q ˉ j n ) log ( 1 − q i n ) ] ( 4 ) \boldsymbol{C}_{i, j}^{c e s}=-\frac{1}{N} \sum_{n=1}^{N}\left[\bar{q}_{j}^{n} \log q_{i}^{n}+\left(1-\bar{q}_{j}^{n}\right) \log \left(1-q_{i}^{n}\right)\right] \quad\quad\quad\quad(4) Ci,jces=−N1n=1∑N[qˉjnlogqin+(1−qˉjn)log(1−qin)](4)
Overall speaking , standard (1) The geometric boundary of the learning frame is guaranteed , standard (2)(3) Maximize the coverage of effective points and overcome the non-uniformity , Pictured 5 Shown . The first i i i Prediction box and j j j individual ground truth The box is defined as :
C i , j = C i , j e d + C i , j s I o U + C i , j c e s ( 5 ) \boldsymbol{C}_{i, j}=\boldsymbol{C}_{i, j}^{e d}+\boldsymbol{C}_{i, j}^{s I o U}+\boldsymbol{C}_{i, j}^{c e s} \quad\quad\quad\quad(5) Ci,j=Ci,jed+Ci,jsIoU+Ci,jces(5)
The loss function follows the bounding box correlation layer , Prediction box B \boldsymbol{B} B And fractions B s \boldsymbol{B}_{s} Bs All use associated indexes A A A reorder , Make the first prediction T T T Boxes and scores with T T T individual ground truth Boxes are well matched .
Multi-criteria Loss for Box Prediction: The former correlation layer is based on the minimum cost (cost) For each ground truth Box find the most similar prediction box , Include :1) Vertex Euclidean distance ,2) Point on sIoU cost (cost), as well as 3) Cross entropy score . therefore , The loss function of the bounding box prediction is naturally designed to always minimize these costs (cost). Its formal definition is as follows :
ℓ b b o x = 1 T ∑ t = 1 T ( C t , t e d + C t , t s I o U + C t , t c e s ) ( 6 ) \ell_{b b o x}=\frac{1}{T} \sum_{t=1}^{T}\left(\boldsymbol{C}_{t, t}^{e d}+\boldsymbol{C}_{t, t}^{s I o U}+\boldsymbol{C}_{t, t}^{c e s}\right) \quad\quad\quad\quad(6) ℓbbox=T1t=1∑T(Ct,ted+Ct,tsIoU+Ct,tces)(6)
among C t , t e d , C t , t s I o U \boldsymbol{C}_{t, t}^{e d}, \boldsymbol{C}_{t, t}^{s I o U} Ct,ted,Ct,tsIoU and C t , t c e s \boldsymbol{C}_{t, t}^{c e s} Ct,tces It's No t t t Cost of pairing boxes . Please note that , We only minimized T A pair of boxes cost; remainder H - T Forecast boxes ignored , Because they have no corresponding ground truth. therefore , This box predicts subbranches and H Is independent of the predefined value of . Here comes a question . because H - T Negative predictions go unpunished , Therefore, the network may predict multiple similar boxes for a single instance . Fortunately, , The loss function of parallel box fraction prediction can alleviate this problem .
The loss of box score prediction : The prediction box score is intended to indicate the effectiveness of the corresponding prediction box . Indexed by association A A A After reordering , front T T T Scores ground truth The scores are “1”, The rest are invalid H-T The score is “0”. We use cross entropy loss for this binary classification task :
ℓ b b s = − 1 H [ ∑ t = 1 T log B s t + ∑ t = T + 1 H log ( 1 − B s t ) ] ( 7 ) \ell_{b b s}=-\frac{1}{H}\left[\sum_{t=1}^{T} \log \boldsymbol{B}_{s}^{t}+\sum_{t=T+1}^{H} \log \left(1-\boldsymbol{B}_{s}^{t}\right)\right] \quad\quad\quad\quad(7) ℓbbs=−H1[t=1∑TlogBst+t=T+1∑Hlog(1−Bst)](7)
among B s t \boldsymbol{B}_{s}^{t} Bst It is the... After association t A prediction score . Basically , This loss function rewards the bounding box for correct prediction , At the same time, it implicitly punishes the case that a single instance returns to multiple similar boxes .
2.3 Point Mask Prediction
Given the bounding box of the forecast B B B、 Point characteristics of learning F l \boldsymbol{F}_{l} Fl And global characteristics F g \boldsymbol{F}_{g} Fg, The dot mask prediction branch processes each bounding box separately using a shared neural layer .
surface 1:ScanNet(v2) The benchmark ( Hide test sets ) Instance segmentation results on . The measure is IoU The threshold for 0.5 Of AP(%). On 2019 year 6 month 2 A visit to .

Nerve layer : Pictured 6 Shown , Both the point and global features are compressed into 256 Dimension vector , Then connect and further compress to 128 Dimensional mixed point features F ~ l \widetilde{\boldsymbol{F}}_{l} Fl. For the first i i i Predicted bounding boxes B i \boldsymbol{B}_{i} Bi, The estimated vertices and scores are connected with the features F ~ l \widetilde{\boldsymbol{F}}_{l} Fl The fusion , Generate frame aware features F ^ l \widehat{\boldsymbol{F}}_{l} Fl. These features are then fed through the shared layer , forecast point-level Binary mask , Expressed as M i \boldsymbol{M}_{i} Mi. We use sigmoid As the last activation function . It is similar to RoIAlign comparison , This simple frame fusion method is very effective in computation [58; 15; 13] This involves expensive point feature sampling and alignment .
Loss function : According to the previous association index A \boldsymbol{A} A, Predicted instance mask M M M And ground truth Masks are similarly associated with . Due to the imbalance of instance and background points , We use focus loss with default super parameters [29] Instead of standard cross entropy loss to optimize this branch . Only effective T T T Pairing masks for loss function ℓ p m a s k \ell_{p m a s k} ℓpmask.
chart 6: The architecture of the dot mask prediction branch . Point features are fused with each bounding box and fraction , Then predict one for each instance point-level Binary mask .

2.4 End-to-End Implementation
Although our framework is not limited to any point cloud network , But we use PointNet++[38] As a backbone for learning local and global features . meanwhile , Implemented another separate branch , To use standard softmax Cross entropy loss function ℓ sem \ell_{\text {sem }} ℓsem To learn every bit of semantics . The architecture of the trunk and semantic branches is similar to [50] The same as used in . Given an input point cloud P \boldsymbol{P} P, The above three branches are linked , And use a single combination of multi task losses for end-to-end training :
ℓ all = ℓ sem + ℓ b b o x + ℓ b b s + ℓ pmask ( 8 ) \ell_{\text {all }}=\ell_{\text {sem }}+\ell_{b b o x}+\ell_{b b s}+\ell_{\text {pmask }} \quad\quad\quad\quad(8) ℓall =ℓsem +ℓbbox+ℓbbs+ℓpmask (8)
We use Adam solver [18] And its default super parameters . The initial learning rate is set to 5 e − 4 5 e^{-4} 5e−4, Then each 20 individual epoch Divide 2. The whole network starts from scratch Titan X GPU Training on . We used the same settings for all experiments , This ensures the repeatability of our framework .
3 Experiments
3.1 Evaluation on ScanNet Benchmark
We started with ScanNet(v2) 3D Semantic instance segmentation benchmark [7] To evaluate our methods on the Internet . And SGPN[50] similar , We divide the original input point cloud into 1 m × 1 m 1 m \times 1 m 1m×1m Block for training , Test with all points at the same time , And then use BlockMerging Algorithm [50] Assemble the block into a complete 3D scene . In our experiment , We observed that based on vanilla PointNet++ The performance of the semantic prediction sub branch is limited , Unable to provide satisfactory semantics . Due to the flexibility of our framework , So we can easily train a parallel SCN The Internet [11] For our 3D-BoNet The prediction instance estimates more accurate semantic labels per point .IoU The threshold for 0.5 The average accuracy of (AP) Used as an evaluation index .
We are with the table 1 in 18 The leading methods of target categories are compared . especially ,SGPN[50]、3D-BEVIS[8]、MASC[30] and [28] It is a method based on point feature clustering ;RPointNet[58] Learning to generate intensive goals proposals, Then point level segmentation ;3D-SIS[15] It's based on proposal Methods , Use point clouds and color images as input .PanopticFusion[33] Learn to pass Mask-RCNN[13] In more than one 2D Segmentation instance on image , And then use SLAM The system reprojects back to 3D Space . Our approach goes beyond them using only point clouds . It is worth noting that , Our framework performs relatively well in all categories , Instead of preferring specific classes , This proves the superiority of our framework .
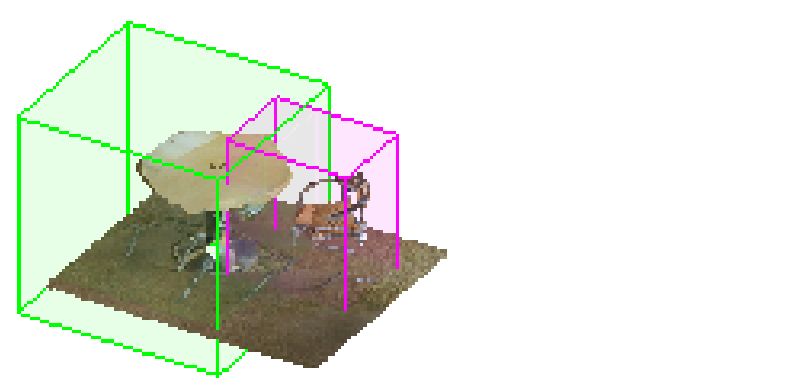
chart 7: This shows that one contains hundreds of targets ( For example, chair 、 Table ) The lecture room , The challenge of instance segmentation is highlighted . Different colors represent different instances . The same instance may have different colors . Our framework predicts instance labels more accurately than other frameworks .

3.2 Evaluation on S3DIS Dataset
We further evaluated our framework in S3DIS[1] Semantic instance segmentation on , This includes coming from 6 A large area 271 A room 3D Full scan . Our data preprocessing and experimental setup strictly follow PointNet[37]、SGPN[50]、ASIS[51] and JSIS3D[34]. In our experiment , H H H Set to 24, We followed 6 Multiple evaluation [1; 51].
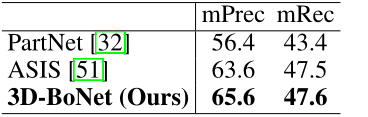
We and ASIS[51]、S3DIS The latest technology and PartNet baseline[32] Compare . For a fair comparison , We use the same as in our framework PointNet++ The trunk and other settings are carefully trained PartNet baseline. To evaluate , Reported IoU The threshold for 0.5 The average precision of classical indexes (mPrec) And the average recall rate (mRec). Please note that , For our methods and PartNet The baseline , Let's use the same one BlockMerging Algorithm [50] To merge instances from different blocks . The final score is a total of 13 Average of categories . surface 2 Shows mPrec/mRec fraction , chart 7 The qualitative results are shown . Our approach goes far beyond PartNet baseline[32], And better than ASIS[51], But not significantly , Mainly because of our semantic prediction branch ( be based on vanilla PointNet++) Not as good as ASIS, The latter closely integrates semantics and instance features to achieve mutual optimization . We take feature fusion as our future exploration .
surface 2:S3DIS The result of instance segmentation on dataset .
3.3 Ablation Study
To evaluate the effectiveness of each component of our framework , We are S3DIS The largest area of the dataset 5 On the 6 Group ablation experiment .
(1)Remove Box Score Prediction Sub-branch. Basically , The box fraction is used as the index and regularizer of effective bounding box prediction . After deleting it , We use the following methods to train the network :
ℓ a b 1 = ℓ s e m + ℓ b b o x + ℓ p m a s k \ell_{a b 1}=\ell_{s e m}+\ell_{b b o x}+\ell_{p m a s k} ℓab1=ℓsem+ℓbbox+ℓpmask
first , Multi criteria loss function is Euclidean distance 、soft IoU A simple unweighted combination of cost and cross entropy scores . However , This may not be optimal , Because the density of the input point cloud is usually inconsistent , And tend to choose different criteria . The ablative boundary box loss function is 3 Group experiment .
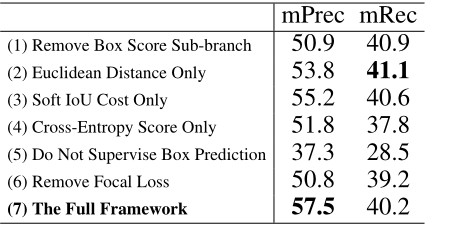
surface 3:S3DIS Area 5 Segmentation results of all ablation experiments on the .
(2)-(4) Use a single standard . There is only one criterion for frame correlation and loss ℓ b b o x \ell_{b b o x} ℓbbox.
ℓ a b 2 = ℓ s e m + 1 T ∑ t = 1 T C t , t e d + ℓ b b s + ℓ p m a s k … ℓ a b 4 = ℓ s e m + 1 T ∑ t = 1 T C t , t c e s + ℓ b b s + ℓ p m a s k \ell_{a b 2}=\ell_{s e m}+\frac{1}{T} \sum_{t=1}^{T} \boldsymbol{C}_{t, t}^{e d}+\ell_{b b s}+\ell_{p m a s k} \quad \ldots \quad \ell_{a b 4}=\ell_{s e m}+\frac{1}{T} \sum_{t=1}^{T} \boldsymbol{C}_{t, t}^{c e s}+\ell_{b b s}+\ell_{p m a s k} ℓab2=ℓsem+T1t=1∑TCt,ted+ℓbbs+ℓpmask…ℓab4=ℓsem+T1t=1∑TCt,tces+ℓbbs+ℓpmask
(5) Unsupervised box predictions . The prediction box is still associated according to three criteria , But we removed the box supervision signal . The framework has been trained as follows :
ℓ a b 5 = ℓ s e m + ℓ b b s + ℓ p m a s k \ell_{a b 5}=\ell_{s e m}+\ell_{b b s}+\ell_{p m a s k} ℓab5=ℓsem+ℓbbs+ℓpmask
(6) Remove the dot mask prediction Focal Loss. In the dot mask prediction Branch , Replace the focus loss with the standard cross entropy loss for comparison .
analysis . surface 3 The scores of ablation experiments are shown . (1) box score Sub branches are really good for overall instance partitioning performance , Because it tends to punish repetition box forecast .(2) Compared with Euclidean distance and cross entropy score , Because of our differentiable algorithm 1, Frame related and supervised sIoU Costs tend to be better . Since three separate standards prefer different types of point structures , So three simple combinations on a particular dataset , Standards may not always be optimal .(3) If there is no monitoring of box predictions , Performance will degrade significantly , The main reason is that the network cannot infer a satisfactory instance 3D The border , And the quality of the prediction dot mask decreases accordingly .(4) And focal loss comparison , Due to the imbalance of instance and background points , The effect of standard cross entropy loss on point mask prediction is poor .
3.4 Computation Analysis
(1) For the method based on point feature clustering , Include SGPN[50]、ASIS[51]、JSIS3D[34]、3D-BEVIS[8]、MASC[30] and [28], The computational complexity of the post clustering algorithm, for example Mean Shift[6] Tend to O ( T N 2 ) \mathcal{O}\left(T N^{2}\right) O(TN2), among T T T Is the number of instances , N N N Is to enter the number of points .(2) For including GSPN[58]、3D-SIS[15] and PanopticFusion[33] Based on the intensive proposal Methods , Areas are usually required proposal Network and non maximum suppression to generate and prune dense proposal, It's computationally expensive [33]. (3)PartNet baseline[32] And our 3D-BoNet Both have similar effective computational complexity O ( N ) \mathcal{O}(N) O(N). Based on experience , our 3D-BoNet It takes about 20 ms GPU Time to deal with 4k spot , and (1)(2) Most of the methods in need of more than 200 ms GPU/CPU Time to process the same number of points .
4 Related Work
In order to learn from 3D Feature extraction from point cloud , Traditional methods usually make features manually [5; 42]. Recently, learning based methods mainly include voxel based methods [42; 46; 41; 23; 40; 11; 4] And point based solutions [37; 19; 14; 16; 45].
Semantic Segmentation PointNet[37] It shows the leading results of classification and semantic segmentation , But it doesn't capture context features . To solve this problem , Many ways [38; 57; 43; 31; 55; 49; 26; 17] Recently proposed . Another pipeline is based on convolution kernel [55; 27; 47]. Basically , Most of these methods can be used as our backbone network , And with our 3D-BoNet Parallel training to learn each point of semantics .
Object Detection stay 3D The common method of detecting objects in point cloud is to project points to 2D Return to the bounding box on the image [25; 48; 3; 56; 59; 53]. Through fusion [3] Medium RGB Images , The detection performance is further improved RGB Images [3;54;36;52].. Point clouds can also be divided into voxels for target detection [9; 24; 60]. However , Most of these methods rely on predefined anchors and two-stage areas proposal The Internet [39]. stay 3D Extending them over point clouds is inefficient . Don't rely on anchors Under the circumstances , Current PointRCNN[44] Learn to detect through the front scenic spot segmentation , and VoteNet[35] Group by point feature 、 Sampling and voting to detect targets . by comparison , Our box prediction branches are completely different from them . Our framework directly regresses from compact global features through a single forward pass 3D Target bounding box .
Instance Segmentation SGPN[50] Is the first to pass on point-level Embed groups to split 3D Neural algorithm for point cloud instances .ASIS[51]、JSIS3D[34]、MASC[30]、3D-BEVIS[8] and [28] Use the same strategy to group point level features , For example, instance segmentation . Mo By classifying point features , stay PartNet[32] A segmentation algorithm is introduced in . However , these proposal-free The learning fragment of the method is not highly targeted , Because it does not explicitly detect the target boundary . By learning from successful 2D RPN[39] and RoI [13],GSPN[58] and 3D-SIS[15] Is based on proposal Of 3D Instance segmentation method . however , They usually rely on two-stage training and a post-processing step for intensive proposal pruning . by comparison , Our framework directly predicts one for each instance within the explicitly detected object boundary point-level Mask , Without any post-processing steps .
5 Conclusion
Our framework is simple 、 Effective and efficient , Can be used for 3D Instance segmentation on point cloud . however , It also has some limitations , Lead to future work . (1) Instead of using an unweighted combination of three criteria , How about designing a module to automatically learn weights , To accommodate different types of input point clouds .(2) More advanced feature fusion modules can be introduced to improve semantics and instance segmentation , Instead of training individual branches for semantic prediction .(3) Our framework follows MLP Design , Therefore, it is independent of the number and order of input points . By drawing on recent work [10][22], It is advisable to train and test directly on the large-scale input point cloud rather than on the segmented small pieces .
References
[1] I. Armeni, O. Sener, A. Zamir, and H. Jiang. 3D Semantic Parsing of Large-Scale Indoor Spaces. CVPR, 2016.
[2] Y . Bengio, N. Léonard, and A. Courville. Estimating or Propagating Gradients Through Stochastic Neurons for Conditional Computation. arXiv, 2013.
[3] X. Chen, H. Ma, J. Wan, B. Li, and T. Xia. Multi-View 3D Object Detection Network for Autonomous Driving. CVPR, 2017.
[4] C. Choy, J. Gwak, and S. Savarese. 4D Spatio-Temporal ConvNets: Minkowski Convolutional Neural Networks. CVPR, 2019.
[5] C. S. Chua and R. Jarvis. Point signatures: A new representation for 3d object recognition. IJCV, 25(1):63–85, 1997.
[6] D. Comaniciu and P . Meer. Mean Shift: A Robust Approach toward Feature Space Analysis. TPAMI, 24(5):603–619, 2002.
[7] A. Dai, A. X. Chang, M. Savva, M. Halber, T. Funkhouser, and M. Nießner. ScanNet: Richly-annotated 3D Reconstructions of Indoor Scenes. CVPR, 2017.
[8] C. Elich, F. Engelmann, J. Schult, T. Kontogianni, and B. Leibe. 3D-BEVIS: Birds-Eye-View Instance Segmentation. GCPR, 2019.
[9] M. Engelcke, D. Rao, D. Z. Wang, C. H. Tong, and I. Posner. V ote3Deep: Fast Object Detection in 3D Point Clouds Using Efficient Convolutional Neural Networks. ICRA, 2017.
[10] F. Engelmann, T. Kontogianni, A. Hermans, and B. Leibe. Exploring Spatial Context for 3D Semantic Segmentation of Point Clouds. ICCV Workshops, 2017.
[11] B. Graham, M. Engelcke, and L. v. d. Maaten. 3D Semantic Segmentation with Submanifold Sparse Convolutional Networks. CVPR, 2018.
[12] A. Grover, E. Wang, A. Zweig, and S. Ermon. Stochastic Optimization of Sorting Networks via Continuous Relaxations. ICLR, 2019.
[13] K. He, G. Gkioxari, P . Dollar, and R. Girshick. Mask R-CNN. ICCV, 2017.
[14] P . Hermosilla, T. Ritschel, P .-P . V azquez, A. Vinacua, and T. Ropinski. Monte Carlo Convolution for Learning on Non-Uniformly Sampled Point Clouds. ACM Transactions on Graphics, 2018.
[15] J. Hou, A. Dai, and M. Nießner. 3D-SIS: 3D Semantic Instance Segmentation of RGB-D Scans. CVPR, 2019.
[16] B.-S. Hua, M.-K. Tran, and S.-K. Yeung. Pointwise Convolutional Neural Networks. CVPR, 2018.
[17] Q. Huang, W. Wang, and U. Neumann. Recurrent Slice Networks for 3D Segmentation of Point Clouds. CVPR, 2018.
[18] D. P . Kingma and J. Ba. Adam: A method for stochastic optimization. ICLR, 2015.
[19] R. Klokov and V . Lempitsky. Escape from Cells: Deep Kd-Networks for The Recognition of 3D Point Cloud Models. ICCV, 2017.
[20] H. W. Kuhn. The Hungarian Method for the assignment problem. Naval Research Logistics Quarterly, 2(1-2):83–97, 1955.
[21] H. W. Kuhn. V ariants of the hungarian method for assignment problems. Naval Research Logistics Quarterly, 3(4):253–258, 1956.
[22] L. Landrieu and M. Simonovsky. Large-scale Point Cloud Semantic Segmentation with Superpoint Graphs. CVPR, 2018.
[23] T. Le and Y . Duan. PointGrid: A Deep Network for 3D Shape Understanding. CVPR, 2018.
[24] B. Li. 3D Fully Convolutional Network for V ehicle Detection in Point Cloud. IROS, 2017.
[25] B. Li, T. Zhang, and T. Xia. V ehicle Detection from 3D Lidar Using Fully Convolutional Network. RSS, 2016.
[26] J. Li, B. M. Chen, and G. H. Lee. SO-Net: Self-Organizing Network for Point Cloud Analysis. CVPR, 2018.
[27] Y . Li, R. Bu, M. Sun, W. Wu, X. Di, and B. Chen. PointCNN : Convolution On X -Transformed Points. NeurlPS, 2018.
[28] Z. Liang, M. Yang, and C. Wang. 3D Graph Embedding Learning with a Structure-aware Loss Function for Point Cloud Semantic Instance Segmentation. arXiv, 2019.
[29] T.-Y . Lin, P . Goyal, R. Girshick, K. He, and P . Dollar. Focal Loss for Dense Object Detection. ICCV, 2017.
[30] C. Liu and Y . Furukawa. MASC: Multi-scale Affinity with Sparse Convolution for 3D Instance Segmentation. arXiv, 2019.
[31] S. Liu, S. Xie, Z. Chen, and Z. Tu. Attentional ShapeContextNet for Point Cloud Recognition. CVPR, 2018.
[32] K. Mo, S. Zhu, A. X. Chang, L. Yi, S. Tripathi, L. J. Guibas, and H. Su. PartNet: A Large-scale Benchmark for Fine-grained and Hierarchical Part-level 3D Object Understanding. CVPR, 2019.
[33] G. Narita, T. Seno, T. Ishikawa, and Y . Kaji. PanopticFusion: Online V olumetric Semantic Mapping at the Level of Stuff and Things. IROS, 2019.
[34] Q.-H. Pham, D. T. Nguyen, B.-S. Hua, G. Roig, and S.-K. Yeung. JSIS3D: Joint Semantic-Instance Segmentation of 3D Point Clouds with Multi-Task Pointwise Networks and Multi-V alue Conditional Random Fields. CVPR, 2019.
[35] C. R. Qi, O. Litany, K. He, and L. J. Guibas. Deep Hough V oting for 3D Object Detection in Point Clouds. ICCV, 2019.
[36] C. R. Qi, W. Liu, C. Wu, H. Su, and L. J. Guibas. Frustum PointNets for 3D Object Detection from RGB-D Data. CVPR, 2018.
[37] C. R. Qi, H. Su, K. Mo, and L. J. Guibas. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. CVPR, 2017.
[38] C. R. Qi, L. Yi, H. Su, and L. J. Guibas. PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space. NIPS, 2017.
[39] S. Ren, K. He, R. Girshick, and J. Sun. Faster R-CNN: Towards Real-time Object Detection with Region Proposal Networks. NIPS, 2015.
[40] D. Rethage, J. Wald, J. Sturm, N. Navab, and F. Tombari. Fully-Convolutional Point Networks for Large-Scale Point Clouds. ECCV, 2018.
[41] G. Riegler, A. O. Ulusoy, and A. Geiger. OctNet: Learning Deep 3D Representations at High Resolutions. CVPR, 2017.
[42] R. B. Rusu, N. Blodow, and M. Beetz. Fast point feature histograms (fpfh) for 3d registration. ICRA, 2009.
[43] Y . Shen, C. Feng, Y . Yang, and D. Tian. Mining Point Cloud Local Structures by Kernel Correlation and Graph Pooling. CVPR, 2018.
[44] S. Shi, X. Wang, and H. Li. PointRCNN: 3D Object Proposal Generation and Detection from Point Cloud. CVPR, 2019.
[45] H. Su, V . Jampani, D. Sun, S. Maji, E. Kalogerakis, M.-H. Y ang, and J. Kautz. SPLA TNet: Sparse Lattice Networks for Point Cloud Processing. CVPR, 2018.
[46] L. P . Tchapmi, C. B. Choy, I. Armeni, J. Gwak, and S. Savarese. SEGCloud: Semantic Segmentation of 3D Point Clouds. 3DV, 2017.
[47] H. Thomas, C. R. Qi, J.-E. Deschaud, B. Marcotegui, F. Goulette, and L. J. Guibas. KPConv: Flexible and Deformable Convolution for Point Clouds. ICCV, 2019.
[48] V . V aquero, I. Del Pino, F. Moreno-Noguer, J. Soì, A. Sanfeliu, and J. Andrade-Cetto. Deconvolutional Networks for Point-Cloud V ehicle Detection and Tracking in Driving Scenarios. ECMR, 2017.
[49] C. Wang, B. Samari, and K. Siddiqi. Local Spectral Graph Convolution for Point Set Feature Learning. ECCV, 2018.
[50] W. Wang, R. Y u, Q. Huang, and U. Neumann. SGPN: Similarity Group Proposal Network for 3D Point Cloud Instance Segmentation. CVPR, 2018.
[51] X. Wang, S. Liu, X. Shen, C. Shen, and J. Jia. Associatively Segmenting Instances and Semantics in Point Clouds. CVPR, 2019.
[52] Z. Wang, W. Zhan, and M. Tomizuka. Fusing Bird View LIDAR Point Cloud and Front View Camera Image for Deep Object Detection. arXiv, 2018.
[53] B. Wu, A. Wan, X. Y ue, and K. Keutzer. SqueezeSeg: Convolutional Neural Nets with Recurrent CRF for Real-Time Road-Object Segmentation from 3D LiDAR Point Cloud. arXiv, 2017.
[54] D. Xu, D. Anguelov, and A. Jain. PointFusion: Deep Sensor Fusion for 3D Bounding Box Estimation. CVPR, 2018.
[55] Y . Xu, T. Fan, M. Xu, L. Zeng, and Y . Qiao. SpiderCNN: Deep Learning on Point Sets with Parameterized Convolutional Filters. ECCV, 2018.
[56] G. Yang, Y . Cui, S. Belongie, and B. Hariharan. Learning Single-View 3D Reconstruction with Limited Pose Supervision. ECCV, 2018.
[57] X. Ye, J. Li, H. Huang, L. Du, and X. Zhang. 3D Recurrent Neural Networks with Context Fusion for Point Cloud Semantic Segmentation. ECCV, 2018.
[58] L. Yi, W. Zhao, H. Wang, M. Sung, and L. Guibas. GSPN: Generative Shape Proposal Network for 3D Instance Segmentation in Point Cloud. CVPR, 2019.
[59] Y . Zeng, Y . Hu, S. Liu, J. Y e, Y . Han, X. Li, and N. Sun. RT3D: Real-Time 3D V ehicle Detection in LiDAR Point Cloud for Autonomous Driving. IEEE Robotics and Automation Letters, 3(4):3434–3440, 2018.
[60] Y . Zhou and O. Tuzel. V oxelNet: End-to-End Learning for Point Cloud Based 3D Object Detection. CVPR, 2018.
边栏推荐
- After the college entrance examination, the following four situations will inevitably occur:
- 腾讯完成全面上云 打造国内最大云原生实践
- 天书夜读笔记——8.4 diskperf反汇编
- 汇编语言(4)函数传参
- PHP easywechat and applet realize long-term subscription message push
- 粉丝福利,JVM 手册(包含 PDF)
- 实验5 8254定时/计数器应用实验【微机原理】【实验】
- The innovation consortium of Haihe laboratory established gbase and became one of the first member units of the innovation Consortium (Xinchuang)
- Tencent has completed the comprehensive cloud launch to build the largest cloud native practice in China
- 1. 封装自己的脚手架 2.创建代码模块
猜你喜欢

The innovation consortium of Haihe laboratory established gbase and became one of the first member units of the innovation Consortium (Xinchuang)

1. 封装自己的脚手架 2.创建代码模块

Powerbi - for you who are learning

Assembly language (3) 16 bit assembly basic framework and addition and subtraction loop

Abnova丨5-甲基胞嘧啶多克隆抗体中英文说明

谷歌浏览器控制台 f12怎么设置成中文/英文 切换方法,一定要看到最后!!!

Deep learning LSTM model for stock analysis and prediction
leetcode:2104. 子数组范围和

JVM指令

Abnova丨BSG 单克隆抗体中英文说明
随机推荐
天书夜读笔记——深入虚函数virtual
Basic knowledge of assembly language (2) -debug
AutoCAD - two extension modes
Convert MySQL query timestamp to date format
MySQL multi condition matching fuzzy query
百度语音合成语音文件并在网站中展示
Q1季度逆势增长的华为笔电,正引领PC进入“智慧办公”时代
Abnova丨A4GNT多克隆抗体中英文说明
excel 汉字转拼音「建议收藏」
matlab 取整
Lenovo tongfuyao: 11 times the general trend, we attacked the city and pulled out the stronghold all the way
Huawei laptop, which grew against the trend in Q1, is leading PC into the era of "smart office"
JVM directive
Expectation and variance
Bi SQL alias
php easywechat 和 小程序 实现 长久订阅消息推送
(CVPR 2020) Learning Object Bounding Boxes for 3D Instance Segmentation on Point Clouds
Programmer: did you spend all your savings to buy a house in Shenzhen? Or return to Changsha to live a "surplus" life?
C language boundary calculation and asymmetric boundary
国内炒股开户正规安全的具体名单