当前位置:网站首页>Two schemes of transforming the heat map of human posture estimation into coordinate points
Two schemes of transforming the heat map of human posture estimation into coordinate points
2022-07-01 22:41:00 【zouxiaolv】
# import torch.nn as nn
# import torch
#
# import torch.nn.functional as F
#
# class SimpleSelfAttention(nn.Module):
# def __init__(self, n_in:int, ks=1, sym=False):#, n_out:int):
# super().__init__()
# # self.conv = nn.Conv2d(n_in, n_in, kernel_size=1,
# # stride=1, padding=ks//2, bias=False)
# self.midchannel = n_in//4
# self.conv = nn.Conv2d(n_in, self.midchannel, ks, padding=ks//2, bias=False)
# self.conv1 = nn.Conv2d(n_in, 1, ks, padding=ks//2, bias=False)
# self.convexp = nn.Conv2d(self.midchannel, n_in, ks, padding=ks//2, bias=False)
# self.gamma = nn.Parameter(torch.tensor([0.]))
# self.sym = sym
# self.n_in = n_in
# def conv1d(self,ni:int, no:int, ks:int=1, stride:int=1, padding:int=0, bias:bool=False):
# "Create and initialize a `nn.Conv1d` layer with spectral normalization."
# conv = nn.Conv1d(ni, no, ks, stride=stride, padding=padding, bias=bias)
# nn.init.kaiming_normal_(conv.weight)
# if bias: conv.bias.data.zero_()
# return conv
# def forward(self,x):
# if self.sym:
# # symmetry hack by https://github.com/mgrankin
# c = self.conv.weight.view(self.n_in,self.n_in)
# c = (c + c.t())/2
# self.conv.weight = c.view(self.n_in,self.n_in,1)
# size = x.size()
# # print(size)
# # x = x.view(*size[:2],-1) # (C,N)
# x_ = self.conv1(x)
# x_ = x_.view(size[2],-1) # (C,N)
# print('x_=',x_.shape)
# # changed the order of mutiplication to avoid O(N^2) complexity
# # (x*xT)*(W*x) instead of (x*(xT*(W*x)))
# convx = self.conv(x) # (C,C) * (C,N) = (C,N) => O(NC^2)
# print('convx=',convx.shape)
# # print(x.shape,x_.shape)
# xxT = torch.mm(x_,x_.permute(1,0).contiguous()) # (C,N) * (N,C) = (C,C) => O(NC^2)
# print('xxT=',xxT.shape)
# o = torch.matmul(xxT, convx) # (C,C) * (C,N) = (C,N) => O(NC^2)
# print('o=',o.shape)
# o = self.convexp(o)
# print('o1=', o.shape)
# o = self.gamma * o + x
# print('o2=', o.shape)
# return o.view(*size).contiguous()
#
# b = torch.rand(3,40,32,24)
# aaa = SimpleSelfAttention(40,1)
# aaa(b)
import torch.nn.functional as F
import torch
from torch.autograd import Variable
import torch.nn as nn
import numpy as np
import os
def makeGaussian(height, width, sigma=3, center=None):
""" Make a square gaussian kernel.
size is the length of a side of the square
sigma is full-width-half-maximum, which
can be thought of as an effective radius.
"""
x = np.arange(0, width, 1, float)
y = np.arange(0, height, 1, float)[:, np.newaxis]
if center is None:
x0 = width // 2
y0 = height // 2
else:
x0 = center[0]
y0 = center[1]
return 10 * np.exp(-4 * np.log(2) * ((x - x0) ** 2 + (y - y0) ** 2) / sigma ** 2)
def generate_hm(height, width, joints, maxlenght):
""" Generate a full Heap Map for every joints in an array
Args:
height : Wanted Height for the Heat Map
width : Wanted Width for the Heat Map
joints : Array of Joints 15*2
maxlenght : Lenght of the Bounding Box
"""
num_joints = joints.shape[0]
hm = np.zeros((num_joints, height, width), dtype=np.float32)
for i in range(num_joints):
s = int(np.sqrt(maxlenght) * maxlenght * 10 / 4096) + 3
hm[i, :, :] = makeGaussian(height, width, sigma=s, center=(joints[i, 0], joints[i, 1]))
return hm
def generate_3d_integral_preds_tensor_modify(heatmaps):
assert isinstance(heatmaps, torch.Tensor)
'''
heatmap: [B, numJoint, H, W]
'''
accu_x = heatmaps.sum(dim=2) # [1, 2, x_dim]
accu_y = heatmaps.sum(dim=3)
accu_x = F.softmax(accu_x, 2)
accu_y = F.softmax(accu_y, 2)
# accu_x = accu_x * torch.arange(heatmaps.shape[-1]).type(torch.cuda.FloatTensor)
# accu_y = accu_y * torch.arange(heatmaps.shape[-2]).type(torch.cuda.FloatTensor)
accu_x = accu_x * torch.arange(heatmaps.shape[-1]).float()
accu_y = accu_y * torch.arange(heatmaps.shape[-2]).float()
accu_x = accu_x.sum(dim=2, keepdim=True)
accu_y = accu_y.sum(dim=2, keepdim=True)
return accu_x, accu_y
if __name__ == '__main__':
x = torch.from_numpy(np.array([[1,2,3,4],[1,2,3,4]])).type(torch.float32)
GT_xy = np.array([[10, 10], [3, 8], [16, 18]])
heatmap = generate_hm(64, 32, GT_xy, 64) # [numJoint, 64, 64]
# heatmap = torch.unsqueeze(torch.from_numpy(heatmap), 0).cuda() # [1, numJoint, 64, 64]
heatmap = torch.unsqueeze(torch.from_numpy(heatmap), 0) # [1, numJoint, 64, 64]
x, y = generate_3d_integral_preds_tensor_modify(heatmaps=heatmap) #
print('x=',x)
print('y=',y)
print("")
print('***************************************')
import torch.nn.functional as F
import torch
from torch.autograd import Variable
import torch.nn as nn
import numpy as np
import os
def makeGaussian(height, width, sigma=3, center=None):
""" Make a square gaussian kernel.
size is the length of a side of the square
sigma is full-width-half-maximum, which
can be thought of as an effective radius.
"""
x = np.arange(0, width, 1, float)
y = np.arange(0, height, 1, float)[:, np.newaxis]
if center is None:
x0 = width // 2
y0 = height // 2
else:
x0 = center[0]
y0 = center[1]
return 10 * np.exp(-4 * np.log(2) * ((x - x0) ** 2 + (y - y0) ** 2) / sigma ** 2)
def generate_hm(height, width, joints, maxlenght):
""" Generate a full Heap Map for every joints in an array
Args:
height : Wanted Height for the Heat Map
width : Wanted Width for the Heat Map
joints : Array of Joints 15*2
maxlenght : Lenght of the Bounding Box
"""
num_joints = joints.shape[0]
hm = np.zeros((num_joints, height, width), dtype=np.float32)
for i in range(num_joints):
s = int(np.sqrt(maxlenght) * maxlenght * 10 / 4096) + 3
hm[i, :, :] = makeGaussian(height, width, sigma=s, center=(joints[i, 0], joints[i, 1]))
return hm
def generate_3d_integral_preds_tensor_init(heatmaps, num_joints, x_dim, y_dim):
assert isinstance(heatmaps, torch.Tensor)
'''
heatmap: [B, numJoint, H, W]
'''
heatmap = heatmaps.reshape((heatmaps.shape[0], 3, -1))
heatmap = F.softmax(heatmap, 2)
heatmaps = heatmaps.reshape((heatmaps.shape[0], num_joints, y_dim, x_dim))
accu_x = heatmaps.sum(dim=2) # [1, 2, x_dim]
accu_y = heatmaps.sum(dim=3)
accu_x = accu_x * torch.arange(x_dim).float()
accu_y = accu_y * torch.arange(y_dim).float()
accu_x = accu_x.sum(dim=2, keepdim=True)
accu_y = accu_y.sum(dim=2, keepdim=True)
return accu_x, accu_y
if __name__ == '__main__':
x = torch.from_numpy(np.array([[1, 2, 3, 4], [1, 2, 3, 4]])).type(torch.float32)
GT_xy = np.array([[10, 10], [3, 8], [16, 18]])
heatmap = generate_hm(64, 32, GT_xy, 64) # [numJoint, 64, 64]
heatmap = torch.unsqueeze(torch.from_numpy(heatmap), 0) # [1, numJoint, 64, 64]
x, y = generate_3d_integral_preds_tensor_init(heatmaps=heatmap, num_joints=3, x_dim=32, y_dim=64)
print('x***********=',x)#
print('y*************=',y)
边栏推荐
- Resttemplate remote call tool class
- 20220701
- 人体姿态估计的热图变成坐标点的两种方案
- 牛客月赛-分组求对数和
- 13th Blue Bridge Cup group B national tournament
- CSDN购买的课程从哪里可以进入
- Mysql——》索引存储模型推演
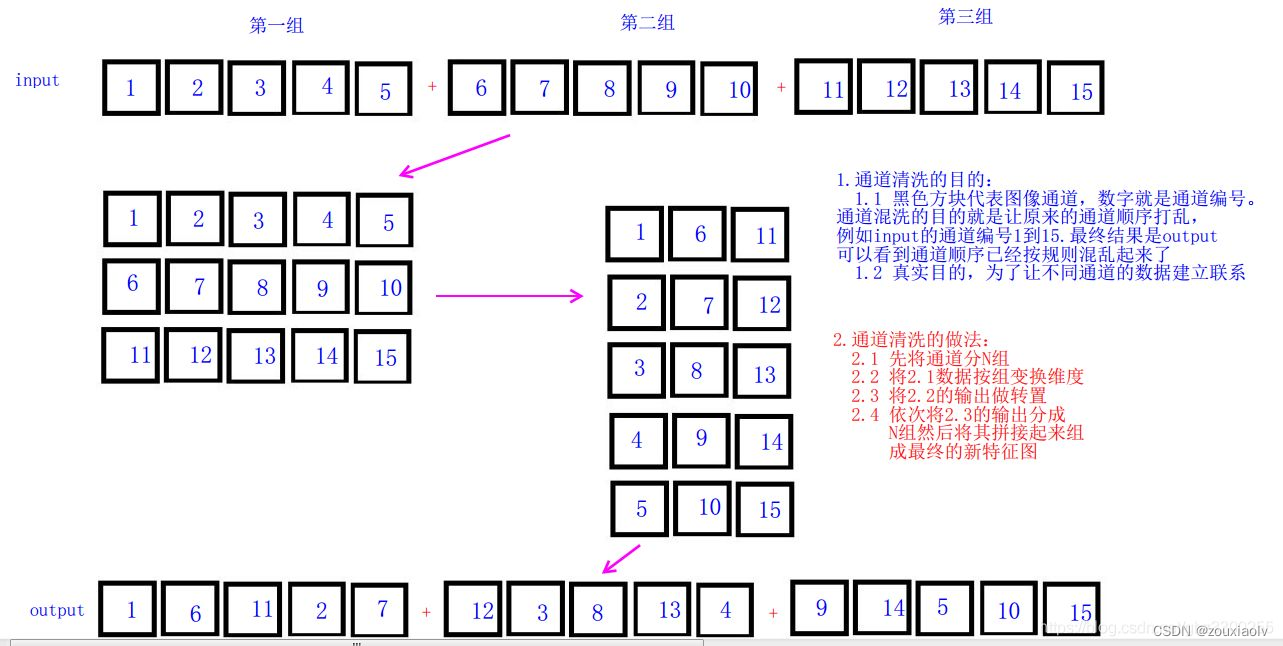
- Compensation des créneaux horaires
- Which securities company should we choose to open an account for flush stock? Is it safe to open an account with a mobile phone?
- 比较版本号[双指针截取自己想要的字串]
猜你喜欢








随机推荐
倒置残差的理解
flink sql-client 使用 对照并熟悉官方文档
利用SecureCRTPortable远程连接虚拟机
陈天奇的机器学习编译课(免费)
C#/VB. Net to add text / image watermarks to PDF documents
Learn MySQL from scratch - database and data table operations
Slope compensation
【图像分割】2021-SegFormer NeurIPS
[intelligent QBD risk assessment tool] Shanghai daoning brings you leanqbd introduction, trial and tutorial
C#/VB.NET 给PDF文档添加文本/图像水印
效率提升 - 鼓捣个性化容器开发环境
切面条 C语言
Wechat open platform scanning code login [easy to understand]
多种智能指针
PyTorch磨刀篇|argmax和argmin函数
【c语言】malloc函数详解[通俗易懂]
Appium automated testing foundation - Supplement: introduction to desired capabilities parameters
Basic knowledge of ngnix
对象内存布局
YOLOv5.5 调用本地摄像头