当前位置:网站首页>机器人学DH参数及利用matlab符号运算推导
机器人学DH参数及利用matlab符号运算推导
2022-06-28 04:26:00 【subtitle_】
引言
重新复习了一下机器人学DH参数,并且利用matlab符号运算进行了推导,验证了公式。
1.DH参数原理

图中的坐标系定义:
- 坐标系 i {i} i的 z z z轴 z i z_i zi和关节轴线 i i i共线,指向任意规定。
- 坐标系 i {i} i的 x x x轴 x i x_i xi和 a i a_i ai重合,由关节 i i i指向关节 i + 1 i+1 i+1,当 a i = 0 a_i=0 ai=0,取 x i = ± z i + 1 × z i x_i=±z_{i+1}\times z_i xi=±zi+1×zi。
- 坐标系 i {i} i的 y y y轴 y i y_i yi按右手法则规定。
- 坐标系 i {i} i的原点 o i o_i oi取在 x i x_i xi和 z i z_i zi的交点上;当 z i z_i zi和 z i + z_{i+} zi+相交时,原点取再两轴交点上,当 z i z_i zi和 z i + z_{i+} zi+平行时,原点取在使 d i + 1 = 0 d_{i+1}=0 di+1=0的地方。
利用连杆坐标系定义相应的连杆参数:
- a i a_i ai=从 z i z_i zi到 z i + 1 z_{i+1} zi+1沿 x i x_i xi测量的距离(公垂线长度)
- α i \alpha_i αi=从 z i z_i zi到 z i + 1 z_{i+1} zi+1沿 x i x_i xi旋转的角度
- d i d_i di=从 x i − 1 x_{i-1} xi−1到 x i x_{i} xi沿 z i z_i zi测量的距离
- θ i \theta_i θi=从 x i − 1 x_{i-1} xi−1到 x i x_{i} xi沿 z i z_i zi旋转的角度
坐标系 { i } \{i\} { i}相对坐标系 { i − 1 } \{i-1\} { i−1}的变换矩阵 i − 1 T i {}^{i-1}T_{i} i−1Ti可以看作四个子变换矩阵的乘积:
- 绕 x i − 1 x_{i-1} xi−1轴转 α i − 1 \alpha_{i-1} αi−1角
R o t x ( α i − 1 ) = [ 1 0 0 0 0 c o s α i − 1 − s i n α i − 1 0 0 s i n α i − 1 c o s α i − 1 0 0 0 0 1 ] R o t_{x}\left(\alpha_{i-1}\right)=\begin{bmatrix}1 &0&0&0\\ 0&cos\alpha_{i-1}&{-sin\alpha_{i-1}}&0\\0&{sin\alpha_{i-1}}&{cos\alpha_{i-1}}&{0}\\ {0}&{0}&{0}&{1}\end{bmatrix} Rotx(αi−1)=⎣⎢⎢⎡10000cosαi−1sinαi−100−sinαi−1cosαi−100001⎦⎥⎥⎤ - 沿 x i − 1 x_{i-1} xi−1轴移动 a i − 1 a_{i-1} ai−1
T r a n s x ( a i − 1 ) = [ 1 0 0 a i − 1 0 1 0 0 0 0 1 0 0 0 0 1 ] T r a n s_{x}\left(a_{i-1}\right)=\begin{bmatrix}1 &0&0&a_{i-1}\\ 0&1&0&0\\0&0&1&{0}\\ {0}&{0}&{0}&{1}\end{bmatrix} Transx(ai−1)=⎣⎢⎢⎡100001000010ai−1001⎦⎥⎥⎤ - 沿 z i z_{i} zi轴移动 θ i \theta_{i} θi
R o t z ( θ i ) = [ c o s θ i − s i n θ i 0 0 s i n θ i c o s θ i 0 0 0 0 1 0 0 0 0 1 ] R o t_{z}\left(\theta_{i}\right)=\begin{bmatrix}{cos\theta_{i}}&{-sin\theta_{i}}&0&0\\ {sin\theta_{i}}&{cos\theta_{i}}&0&0\\0&0&1&0\\ {0}&{0}&{0}&{1}\end{bmatrix} Rotz(θi)=⎣⎢⎢⎡cosθisinθi00−sinθicosθi0000100001⎦⎥⎥⎤ - 沿 z i z_{i} zi轴移动 d i d_{i} di
T r a n s z ( d i ) = [ 1 0 0 0 0 1 0 0 0 0 1 d i 0 0 0 1 ] T r a n s_{z}\left(d_{i}\right)=\begin{bmatrix}1 &0&0&0\\ 0&1&0&0\\0&0&1&d_i\\ {0}&{0}&{0}&{1}\end{bmatrix} Transz(di)=⎣⎢⎢⎡10000100001000di1⎦⎥⎥⎤
这些变换都是相对运动坐标系描述的,满足从左到右的原则,可以得到最终变换公式如下:
i i − 1 T = R o t x ( α i ) T r a n s x ( a i ) R o t z ( θ i ) T r a n s z ( d i ) _{i}^{i-1}T=R o t_{x}\left(\alpha_{i}\right)T r a n s_{x}\left(a_{i}\right)R o t_{z}\left(\theta_{i}\right)T r a n s_{z}\left(d_{i}\right) ii−1T=Rotx(αi)Transx(ai)Rotz(θi)Transz(di)
通常规定 a i ≥ 0 a_i\ge0 ai≥0,因为它代表连杆长度,而 α i , d i , θ i \alpha_i, d_i, \theta_i αi,di,θi可正可负。
i i − 1 T = [ c o s θ i − s i n θ i 0 a i − 1 s i n θ i c o s α i − 1 c o s θ i c o s α i − 1 − s i n α i − 1 − d i s i n α i − 1 s i n θ i s i n α i − 1 c o s θ i s i n α i − 1 c o s α i − 1 d i c o s α i − 1 0 0 0 1 ] _{i}^{i-1}T=\begin{bmatrix}{cos\theta_{i}}&{-sin\theta_{i}}&0&{a _{i-1}}\\ {sin\theta_{i}cos\alpha_{i-1}}&{cos\theta_{i}cos\alpha_{i-1}}&{-sin\alpha_{i-1}}&{-d_isin\alpha_{i-1}}\\{sin\theta_{i}sin\alpha_{i-1}}&{cos\theta_{i}sin\alpha_{i-1}}&{cos\alpha_{i-1}}&{d_icos\alpha_{i-1}}\\ {0}&{0}&{0}&{1}\end{bmatrix} ii−1T=⎣⎢⎢⎡cosθisinθicosαi−1sinθisinαi−10−sinθicosθicosαi−1cosθisinαi−100−sinαi−1cosαi−10ai−1−disinαi−1dicosαi−11⎦⎥⎥⎤
2.Matlab符号运算验证
利用Matlab的符号运算进行公式推导进行一下公式的验证
syms theta d alpha a
M=DH_Trans(theta,d,alpha,a)
function M=DH_Trans(theta,d,alpha,a)
R_z_theta=[cos(theta),-sin(theta),0,0;...
sin(theta),cos(theta),0,0;...
0,0,1,0;...
0,0,0,1];
T_z_d=[1,0,0,0;...
0,1,0,0;...
0,0,1,d;...
0,0,0,1];
R_x_alpha=[1,0,0,0;...
0,cos(alpha),-sin(alpha),0;...
0,sin(alpha),cos(alpha),0;...
0,0,0,1];
T_x_a=[1,0,0,a;...
0,1,0,0;...
0,0,1,0;...
0,0,0,1];
M=R_x_alpha*T_x_a*R_z_theta*T_z_d;
end
结果是一致的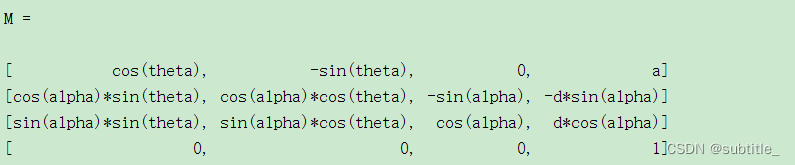
边栏推荐
- Oracledata installation problems
- Matlab exercises -- exercises related to symbolic operation
- flinkcdc采集oracle,oracle数据库是CDB的
- Feign通过自定义注解实现路径的转义
- Distributed transaction - Final consistency scheme based on message compensation (local message table, message queue)
- Are test / development programmers really young? The world is fair. We all speak by strength
- Has anyone ever used CDC to synchronize to MySQL with a deadlock?
- 2022年G3锅炉水处理复训题库模拟考试平台操作
- 2022年中國音頻市場年度綜合分析
- Multithreading and high concurrency IV: varhandle, strong weak virtual reference and ThreadLocal
猜你喜欢
![[applet] solution document using font awesome Font Icon (picture and text)](/img/1b/d1b738e6e35e59cc4a417df4ea0e8d.png)
[applet] solution document using font awesome Font Icon (picture and text)

Multi thread implementation rewrites run (), how to inject and use mapper file to operate database

Performance optimization and implementation of video codec

Matlab exercises -- exercises related to symbolic operation
10: 00 interview, came out at 10:02, the question is really too

Blocking, non blocking, IO multiplexing select\poll\epoll

Idle interrupt cannot be cleared

Huawei's 9-year experience as a software testing director
Role of native keyword

浅析搭建视频监控汇聚平台的必要性及场景应用
随机推荐
How to traverse collections Ordereddict, taking it and forgetting items
多线程实现 重写run(),怎么注入使用mapper文件操作数据库
Pager when importing text files from MySQL
Detailed reading of the thesis: implementing volume models for handowriting text recognition
2022年中国音频市场年度综合分析
Mise en place d'un cadre d'essai d'automatisation de l'interface utilisateur - - rédaction d'une application d'automatisation
[proteus simulation] timer 1 external counting interrupt
恭喜我自己,公众号粉丝破万
[Matlab bp regression prediction] GA Optimized BP regression prediction (including comparison before optimization) [including source code 1901]
Live online source code, JS dynamic effect, sidebar scrolling fixed effect
Resolve cross domain
[csp-j2020] excellent splitting
2022年安全员-A证考试题库及模拟考试
【微服务|OpenFeign】OpenFeign快速入门|基于Feign的服务调用
别卷!如何高质量地复现一篇论文?
The development of the Internet has promoted the emergence of a series of new models such as unbounded retail, digital retail and instant retail
Multithreading and high concurrency six: source code analysis of thread pool
Are test / development programmers really young? The world is fair. We all speak by strength
mysql导入文本文件时的pager
Is it true that qiniu business school gives away securities accounts? Is it safe to open an account