当前位置:网站首页>Moveit2 -- 2. Quick start of moveit in rviz
Moveit2 -- 2. Quick start of moveit in rviz
2022-07-27 11:24:00 【babyrtsh .】
MoveIt stay Rviz Quick start in
adopt RViz and MoveIt Plug in quick use MoveIt Exercise planning .Rviz yes ROS The main visualization tools in , It is also a very useful tool for debugging robot technology .MoveIt Rviz Plug ins allow you to set up virtual environments ( scene ), Create start and target states for the robot interactively , Test various motion planners and visual output .
Start
1. Start the demo and configure the plug-in
Start the demo :
ros2 launch moveit2_tutorials demo.launch.py rviz_tutorial:=true
If this is the first time to do so , belong RViz See an empty world in , You have to add Motion Planning plug-in unit :

stay RViz Of Displays in , Click on Add
from moveit_ros_visualization, selection "MotionPlanning" As “ Display type ”.
And then you can do it in RViz see Panda robot
- When Motion Planning After the plug-in is loaded , We can configure it . stay "Displays" Medium "Global Options", take Fixed Frame Set to
/panda_link0 - Then you can start for your robot ( With Panda robot For example ) Set the plug-in . Click on "Display" Medium "MotionPlanning".
- Make sure Robot Description Set to
robot_description - Make sure Planning Scene Topic Set to
/monitored_planning_scene - Make sure Planned Path Under the Trajectory Topic Set to
/display_planned_path - stay Planning Request Change in Planning Group by
panda_arm.
- Make sure Robot Description Set to
2. Interact with visual robots
There are four different overlapping visualizations :
- Configuration in the robot in the planned scene ( Active by default ).
/monitored_planning_scene - Planning path of robot ( Active by default ).
- green : The starting state of motion planning ( Default disabled ).
- Orange : Target state of motion planning ( Active by default ).
You can use check boxes to turn on and off the display status of each visualization :
- Plan the robot in the scene to pass Scene Robot Menu Show Robot Visual open
- The planning path passes Planel Path Medium Show Robot Visal open
- Start status passed Planning Request Medium Query Start State open
- Target status passed Planning Request Medium Query Goal State open
- Try turning these options on and off for different visualizations

3. And Panda Robots interact
In the next steps , We will only need scene robots , Start state and target state :
- Choose Planning Path Medium Show Robot Visual
- Deselect Scene Robot Medium Show Robot Visual
- Choose Planning Request Medium Query Goal State
- Choose Planning Request Medium Query Start State
Now there should be two interactive balls in the scene . An orange arm corresponding to an interactive ball , For setting up motion planning “ Target state ”, The other ball corresponding to the green arm is used to set the exercise plan “ Start state ”. If you don't see interactive Tags , stay RViz From the top menu of, press Interact( Be careful : Some tools may be hidden , Click... In the top menu “+” To add interactive tools )
You should now be able to use these balls to drag the arm and change its direction . Try it !
Enter the collision
For this part , Hide planning path and target status :
- Deselect Planned Path Medium Show Robot Visual
- Deselect Planning Request Medium Query Goal State
Now? , Only the starting state ( Green arms ) It should be visible . Try to move the arm to a position where its two links collide .( If you find it difficult , Make sure that MotionPlanning Plug in Planning Under the tab "Use Collision-Aware IK". After doing this , The conflicting connecting rod will turn red .
Now? , Choose "Use Collision-Aware IK" Check box , Then try again to move the two connecting rods into conflict with each other . After checking this option ,IK The solver will continue to try to find a collision free solution for the desired end effector pose . If... Is not selected , The solver will allow conflicts in the solution . Regardless of the status of the check box , The connecting rod in conflict will always be shown in red .
Move out of the accessible workspace
Notice what happens when you try to move the end effector out of an accessible workspace .
Before moving on to the next section , Re enable the planned path and target state :
- Choose "Planned Path" Menu "Show Robot Visual"
- Choose "Planning Request" Menu "Query Goal State"
Move Joints perhaps Nullspace
have access to “ The joints ” Tab to move individual joints and 7-DOF Redundant joints of robots . Try moving “Nullspace exploration” slider .
4. Yes Panda Exercise planning
- Now you can MoveIt RViz Plug in for Panda Exercise planning .
- take “ Start state ” Move to the desired location .
- take “ Target state ” Move to another desired location .
- Make sure that these two states do not conflict with the robot itself .
- Make sure the plan path is visualized . At the same time, select Planned Path Medium Show Trail
- stay Planning Under the tab MotionPlanning in , Click on Plan Button . You should be able to see the visualization of arm movement and trajectory .

Check track points
Can be intuitive in RViz Midpoint to point check trajectory .
- from "Panels" The menu , choice "Trajectory - Trajectory Slider". You will see a new Slider Panel in RViz in .
- Set the target pose , And then execute Plan
- Operate the slider panel , for example : Move the slider , And then click Play Button .

Plan Cartesian motion
If checked “Use Cartesian Path”, The robot will try to move the end effector linearly in Cartesian space .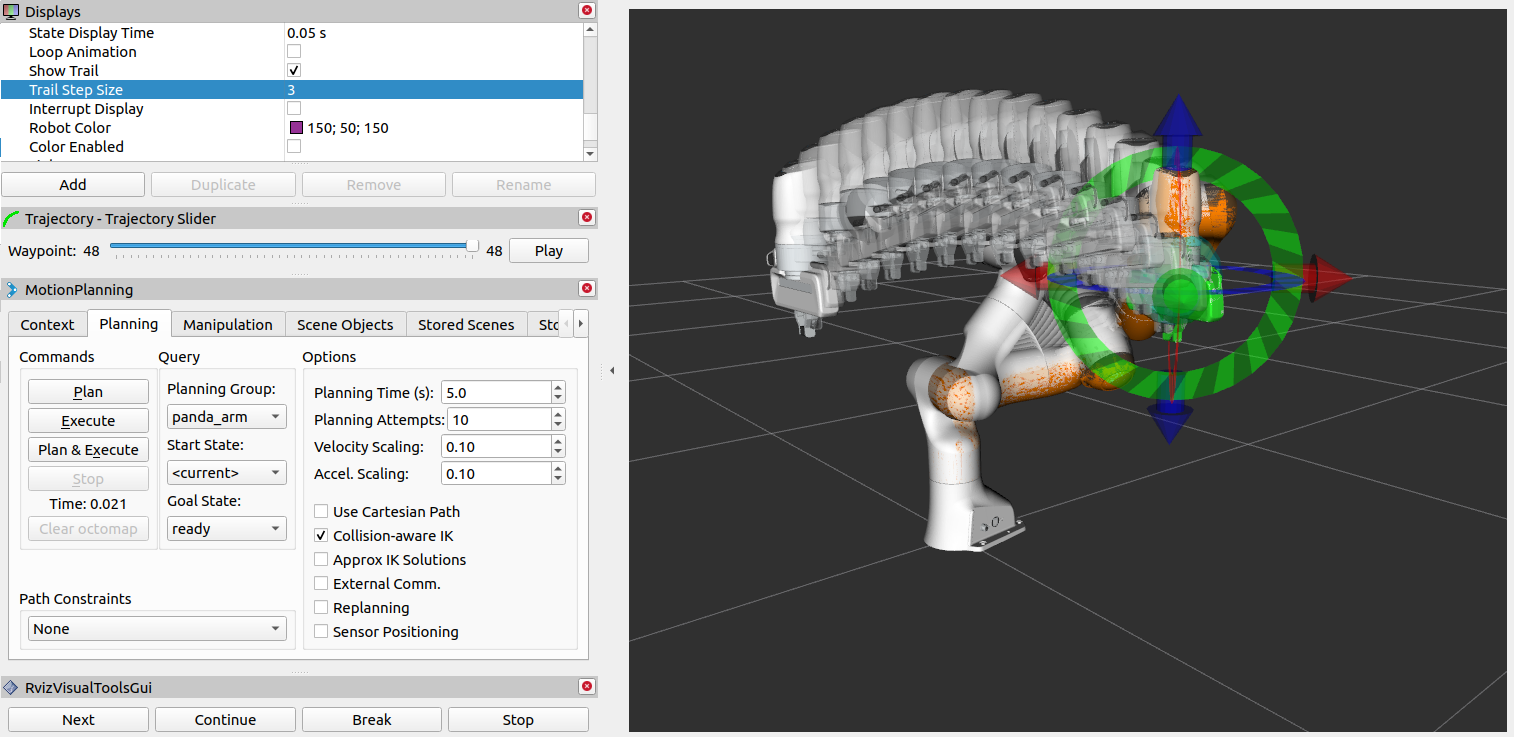

Execution track , Adjust the speed
After the successful plan, click “Plan & Execute” or “Execute” Will send the trajectory to the robot , Because you use demo.launch, So robots are only simulated .
first , The default speed and acceleration are... Of the maximum value of the robot 10%. You can show it below "Planning" Change these values in the tab , It can also be in the robot moveit_config Change these defaults ( stay joint_limits.yaml in )
5. next step
RViz Visual Tools
For many tutorials RvizVisualToolsGui Complete the demonstration step by step . Before proceeding to the next tutorial , It's best to enable RvizVisualToolsGui. from "Panels" In the menu bar , choice “Add New Panels”. Select from the menu "RvizVisualToolsGui" And click OK. You will see new panels added to RViz in .

Save your configuration
RViz Enable you to save your configuration in File->Save Config Next . Before proceeding to the next tutorial , You should do this .
边栏推荐
- Quantitative industry knowledge summary
- Raw socket grabs packets, and packets on some ports cannot be caught
- Yum source installation
- 解决 ImportError: cannot import name 'abs' 导入tensorflow报错
- Longest ascending subsequence model acwing 1010. Interceptor missile
- Data assets are king. How to analyze the relationship between enterprise digital transformation and data asset management?
- 树形DP AcWing 285. 没有上司的舞会
- Basic use of cmake
- PAT(乙级)2022年夏季考试
- 求组合数 AcWing 885. 求组合数 I
猜你喜欢

Find the combination number acwing 885. find the combination number I

Redis+caffeine two-level cache enables smooth access speed

力扣——10. 正则表达式匹配

Kepserver configuration
Redis high availability principle

XXX packages are looking for funding run 'NPM fund' for details solutions
深析C语言的灵魂 -- 指针

Introduction to software vulnerability analysis (I)
最长上升子序列模型 AcWing 272. 最长公共上升子序列

Kangaroo cloud stack based on CBO in spark SQL optimization
随机推荐
11 wrong set
ACM warm-up Exercise 2 in 2022 summer vacation (summary)
Quantitative industry knowledge summary
Instructions for mock platform
Knapsack problem acwing 9. grouping knapsack problem
What is the mystery of the gate of the meta universe?
Memory search acwing 901. Skiing
2022 Niuke multi school (3) j.journey
Basic use of cmake
博弈论 AcWing 892. 台阶-Nim游戏
求组合数 AcWing 885. 求组合数 I
Openatom openharmony sub forum, see you today at 14:00! Wonderful release of memorabilia attached
Analysis of distributed database and cache double write consistency scheme (Reprint)
Based on the open source stream batch integrated data synchronization engine Chunjun data restore DDL parsing module actual combat sharing
(5) Printf (instead of echo)
IO stream_ Character stream, IO stream summary, IO stream case summary
求组合数 AcWing 887. 求组合数 III
Find the combination number acwing 888. find the combination number IV
Game theory acwing 893. Set Nim game
背包模型 AcWing 1022. 宠物小精灵之收服