当前位置:网站首页>DBSCAN point cloud clustering
DBSCAN point cloud clustering
2022-07-23 21:42:00 【Look up at the starry sky_ two thousand and twenty-two】
1、DBSCAN Algorithm principle
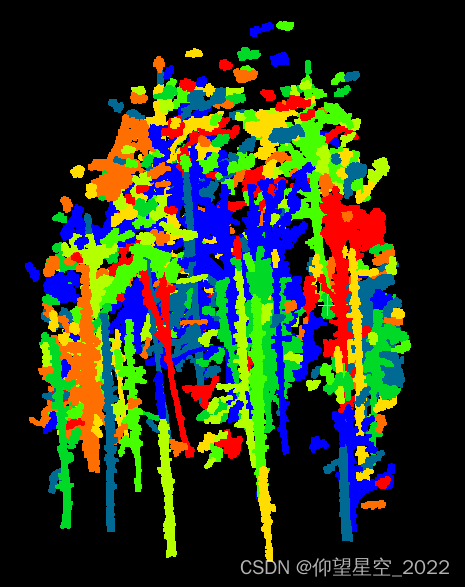
DBSCAN It is a clustering method based on density , It divides points into core points and non core points , In the future, similar regional growth methods will be adopted . The following figure for DBSCAN Clustering results , It can be seen that it can cluster any kind of data , There is no need to define the number of categories .
DBSCAN Cluster description

DBSCAN The clustering process is as follows :
1、 First ,DBSCAN The algorithm will take any starting data point that has not been accessed as the core , And expand the core point . Then we give a radius / distance ε, Any distance from the core point is less than ε The points of are all its adjacent points .
2、 If there are enough points near the core , Then start clustering , And the selected core point will become the first point of the cluster . If there are not enough points nearby , The algorithm will mark it as noise ( Then the noise may become part of the cluster ). In both cases , The selected points will be marked “ Visited ”.
3、 Once clustering starts , Adjacent points of the core , Or all density connected data points starting from this point ( Notice that the density is connected ) Will be divided into the same cluster . Then we take these new points as the core , Expand around ε, And the qualified points will continue to be included in this cluster .
4、 Repeat step 2 and 3, Until there are no data points nearby that can be expanded , Namely clustered ε All points in the neighborhood have been marked “ Visited ”.
5、 Once we finish the cluster , The algorithm will start to retrieve the points that have not been visited , And find more clustering and noise . Once the data is retrieved , Each point is marked as belonging to a cluster or noise .
Compared with other clustering algorithms ,DBSCAN There are some great advantages . First , It does not need to input the number of clusters to be divided . secondly , Even if the data points are very different , It will also include them in clustering ,DBSCAN Can recognize outliers as noise , This means that it can input noise filtering parameters when necessary . Third , It has no bias on the shape of clustering , You can find clusters of any size and shape .
DBSCAN The main drawback of , When the density of clustering is different ,DBSCAN Its performance will be inferior to other algorithms . This is because when the density changes , The distance threshold used to identify adjacent points ε And core points will change with clustering . And this will be particularly obvious in high-dimensional data , Because it will be difficult for us to estimate ε.
From the existing clustering effect , Define some points as noise points , No clustering . Therefore, it can also be understood as : First, denoise the points , Then use distance clustering ( Such as Euclidean clustering ) Realize the clustering of points .
The clustering results of 3D point cloud data are as follows :
2、 Source download
be based on C++ Write the source code download address :
https://download.csdn.net/download/qq_32867925/86246799
Just load three header files into the project 
DBSCAN Core code :
DBSCANKdtreeCluster<pcl::PointXYZ> ec;
ec.setCorePointMinPts(10);
// test 4. uncomment the following line to test the EuclideanClusterExtraction
// pcl::EuclideanClusterExtraction<pcl::PointXYZ> ec;
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>);
tree->setInputCloud(cloud);
std::vector<pcl::PointIndices> cluster_indices;
ec.setClusterTolerance(0.1);// Search the radius of the nearest neighbor
ec.setMinClusterSize(100);// Minimum cluster number requirements
ec.setMaxClusterSize(5000000);// Maximum cluster number limit
ec.setSearchMethod(tree);
ec.setInputCloud(cloud);
ec.extract(cluster_indices);
clock_t end_ms = clock();
std::cout << "cluster time cost:" << double(end_ms - start_ms) / CLOCKS_PER_SEC << " s" << std::endl;
pcl::PointCloud<pcl::PointXYZI>::Ptr cloud_clustered(new pcl::PointCloud<pcl::PointXYZI>);
int j = 0;
// visualization, use indensity to show different color for each cluster.
for (std::vector<pcl::PointIndices>::const_iterator it = cluster_indices.begin(); it != cluster_indices.end(); it++, j++) {
for (std::vector<int>::const_iterator pit = it->indices.begin(); pit != it->indices.end(); ++pit) {
pcl::PointXYZI tmp;
tmp.x = cloud->points[*pit].x;
tmp.y = cloud->points[*pit].y;
tmp.z = cloud->points[*pit].z;
tmp.intensity = j % 8;
cloud_clustered->points.push_back(tmp);
}
}
2、 Clustering effect


From another point of view ,DBSCAN Is another form of distance clustering , Compared with conventional distance clustering , More core point discrimination process .
边栏推荐
- VLAN comprehensive experiment
- High numbers | calculation of triple integral 1 | high numbers | handwritten notes
- googletest
- 2022-7-23 12点 程序爱生活 小时线顶背离出现,保持下跌趋势,等待反弹信号出现。
- Be a professional software craftsman
- Cesium core class viewer viewer details
- High numbers | calculation of double integral 3 | high numbers | handwritten notes
- Basic principle of synchronized lock
- 一时跳槽一时爽,一直跳槽一直爽?
- Openlayers instances advanced mapbox vector tiles advanced mapbox vector maps
猜你喜欢

Basic principle of synchronized lock

基于速度、复杂性等因素比较KernelSHAP和TreeSHAP

Use Gaode map JS API 2.0 to load the starting and ending path tracks

How to use cesium knockout?

Broadcast (broadcast)

Problems and abuse of protocol buffers
集群聊天服务器:Model数据层的框架设计和数据库代码的封装

机器学习习题——对率回归

The total ranking of blogs is 918
Synchronized同步锁的基本原理
随机推荐
Unity - 3D mathematics -vector3
C - documents
JS object array de duplication
Chapter1 data cleaning
Cluster chat server: Design of database table
Use code to set activity to transparent
Interval DP chain stone merging
Problems and abuse of protocol buffers
给定一个以数字组成的数组,实现输出id为数字,并且从小到大排序的name
启牛是什么?请问一下手机开户股票开户安全吗?
Still have 1 requests outstanding when connection from slaveX/X.X.X.X:33202 is closed
Synchronized同步锁的基本原理
Golang invalid argument to intn报错的解决
Cluster chat server: chatservice business layer
合宙ESP32C3硬件配置信息串口打印輸出
Chapter1 数据清洗
TreeMap
How to use cesium knockout?
Leaderboard design in game server
It's good to change jobs for a while, and it's good to change jobs all the time?