当前位置:网站首页>图像处理8-CNN图像分类
图像处理8-CNN图像分类
2022-07-03 08:14:00 【<Hunter>】
图像处理系列
一、内容
(1)利用Pytorch搭建简单的CNN网络实现图像分类,并测试分类效果(更多步骤可参考https://www.stefanfiott.com/machine-learning/cifar-10-classifier-using-cnn-in-pytorch/);
(2)修改网络模型,进行新的训练,并测试分类效果;
(3)撰写实验报告。
二、使用简单的CNN网络进行图像分类
1.导入包
使用图2.1的代码导入包。
图2.1 导入包
2.数据下载、增强和划分
使用图2.2的代码进行数据下载、增强和划分数据集。

图2.2 数据下载、增强、划分
3.神经网络定义
使用图2.3的代码定义一个简单的CNN神经网络。

图2.3 定义简单的CNN神经网络
4.定义优化器
使用图2.4的代码定义优化器。

图2.4 定义优化器
5.训练和保存神经网络
使用图2.5的代码训练定义的模型,并保存,输出如图2.6。

图2.5 神经网络训练与保存

图2.6 模型训练输出
6.测试神经网络
a.准确率
使用图2.7的代码,计算准去率,最后得到准确率为62.17%。

图2.7 计算模型准确率
b.计算每一类的分类准确率
使用图2.8的代码计算每类分类的准确率,结果见图2.9。

图2.8 计算每类分类的准确率

图2.9 每类分类的准确率
c.绘制实际实际类别和预测分类曲线
使用图2.10的代码进行绘制,并输出每个值得大小,如图2.11,曲线如图2.12。
图2.11 绘制实际实际类别和预测分类曲线

图2.12 绘制实际实际类别和预测分类值的大小
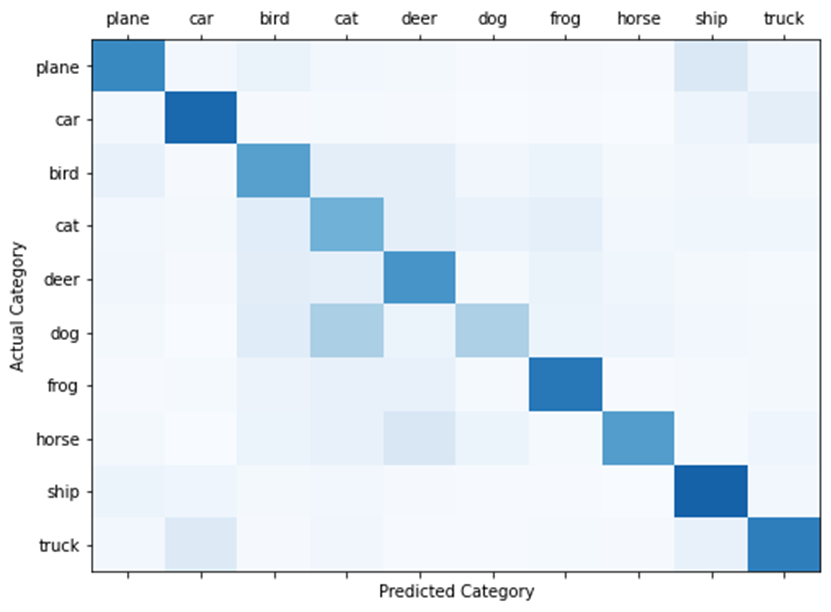
图2.13 绘制实际实际类别和预测分类值曲线
三、Geogle Net图片分类
1.导入包
使用图3.1的代码导入包。
图3.1 导入包
2.数据导入、增强和划分
使用图3.2的代码进行参数定义,数据导入、增强和划分。
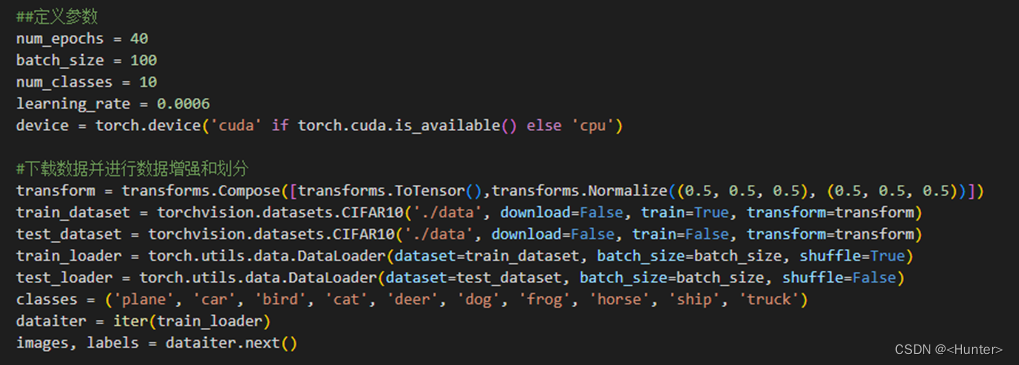
图3.2 参数定义,数据导入、增强和划分
3.定义网络
使用图3.3的代码进行网络定义。
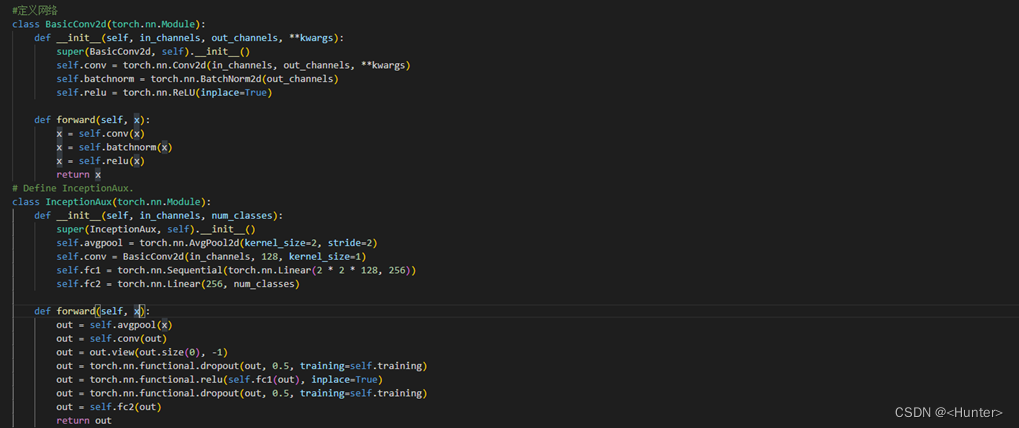

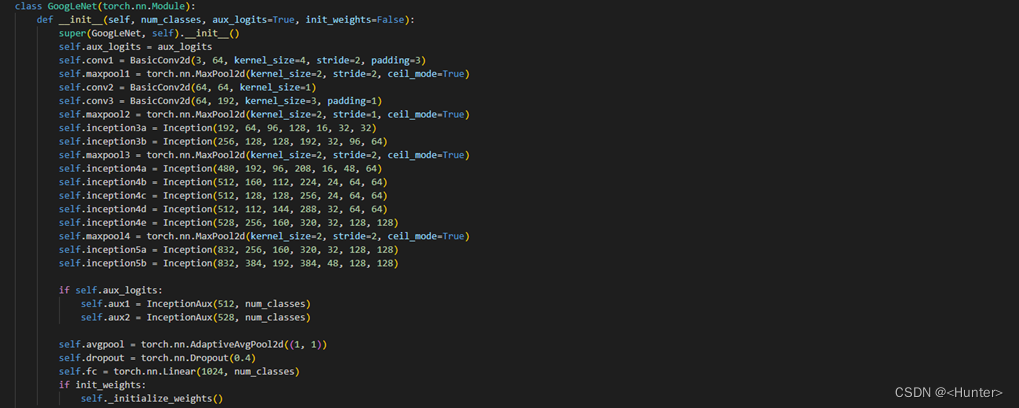
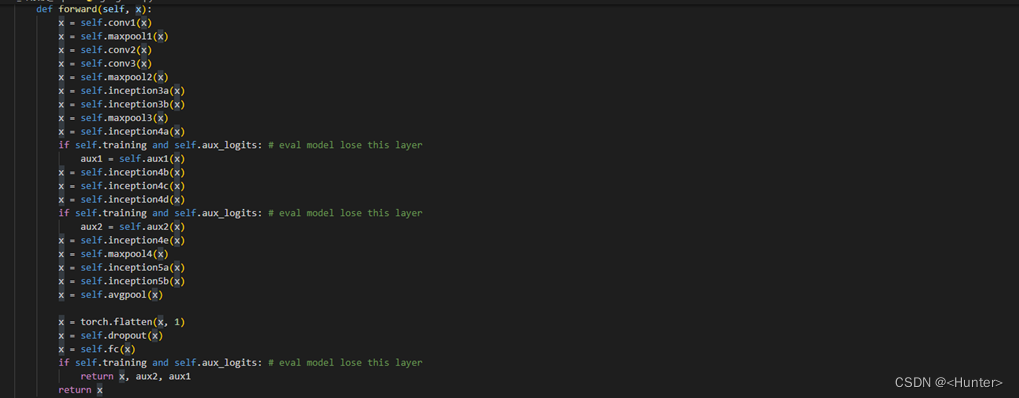

图3.3 网络定义
4.训练网络
使用图3.4的代码进行网络训练,输出如图3.5。
图3.4 网络训练

图3.5 训练输出
5.计算精度
使用图3.6的代码计算精度,精度为80.43%.
图3.6 计算精度
四、总结
使用pytorch,搭建了简单的CNN网络和Geogle Net网络,对Cifar10进行了图像分类,并计算了相应的模型校验参数。
五、源码
1.简单CNN源码
'''
简单CNN图片分类
'''
import torch
import torchvision
import torchvision.transforms as transforms
import matplotlib.pyplot as plt
import numpy as np
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import os
#下载数据并进行数据增强和划分
transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
trainset = torchvision.datasets.CIFAR10('./data', train=True,download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=4,num_workers=4,shuffle=True)
testset = torchvision.datasets.CIFAR10('./data', train=False,download=True, transform=transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=4,num_workers=4,shuffle=False)
classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
dataiter = iter(trainloader)
images, labels = dataiter.next()
#定义网络结构
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(3, 6, 5)
self.pool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(16 * 5 * 5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = x.view(-1, 16 * 5 * 5)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
net = Net()
#定义优化器
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(net.parameters(), lr=0.001, momentum=0.9)
#训练网络
model_directory_path = './model、'
model_path = model_directory_path + 'cifar-10-cnn-model-oralcnn.pt'
if not os.path.exists(model_directory_path):
os.makedirs(model_directory_path)
if os.path.isfile(model_path):
# load trained model parameters from disk
net.load_state_dict(torch.load(model_path))
print('Loaded model parameters from disk.')
else:
for epoch in range(10): # loop over the dataset multiple times
running_loss = 0.0
for i, data in enumerate(trainloader, 0):
# get the inputs
inputs, labels = data
# zero the parameter gradients
optimizer.zero_grad()
# forward + backward + optimize
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
# print statistics
running_loss += loss.item()
if i % 2000 == 1999: # print every 2000 mini-batches
print('[%d, %5d] loss: %.3f' %
(epoch + 1, i + 1, running_loss / 2000))
running_loss = 0.0
print('Finished Training.')
torch.save(net.state_dict(), model_path)
print('Saved model parameters to disk.')
#网络测试
dataiter = iter(testloader)
images, labels = dataiter.next()
outputs = net(images)
sm = nn.Softmax(dim=1)
sm_outputs = sm(outputs)
probs, index = torch.max(sm_outputs, dim=1)
total_correct = 0
total_images = 0
confusion_matrix = np.zeros([10,10], int)
with torch.no_grad():
for data in testloader:
images, labels = data
outputs = net(images)
_, predicted = torch.max(outputs.data, 1)
total_images += labels.size(0)
total_correct += (predicted == labels).sum().item()
for i, l in enumerate(labels):
confusion_matrix[l.item(), predicted[i].item()] += 1
model_accuracy = total_correct / total_images * 100
print('Model accuracy on {0} test images: {1:.2f}%'.format(total_images, model_accuracy))
print('{0:10s} - {1}'.format('Category','Accuracy'))
for i, r in enumerate(confusion_matrix):
print('{0:10s} - {1:.1f}'.format(classes[i], r[i]/np.sum(r)*100))
fig, ax = plt.subplots(1,1,figsize=(8,6))
ax.matshow(confusion_matrix, aspect='auto', vmin=0, vmax=1000, cmap=plt.get_cmap('Blues'))
plt.ylabel('Actual Category')
plt.yticks(range(10), classes)
plt.xlabel('Predicted Category')
plt.xticks(range(10), classes)
plt.show()
print('actual/pred'.ljust(16), end='')
for i,c in enumerate(classes):
print(c.ljust(10), end='')
print()
for i,r in enumerate(confusion_matrix):
print(classes[i].ljust(16), end='')
for idx, p in enumerate(r):
print(str(p).ljust(10), end='')
print()
r = r/np.sum(r)
print(''.ljust(16), end='')
for idx, p in enumerate(r):
print(str(p).ljust(10), end='')
print()2.Geogle Net
'''
geoglenet图片分类
'''
import torch
import torchvision
import torchvision.transforms as transforms
import matplotlib.pyplot as plt
import numpy as np
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import os
import gc
##定义参数
num_epochs = 40
batch_size = 100
num_classes = 10
learning_rate = 0.0006
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
#下载数据并进行数据增强和划分
transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
train_dataset = torchvision.datasets.CIFAR10('./data', download=False, train=True, transform=transform)
test_dataset = torchvision.datasets.CIFAR10('./data', download=False, train=False, transform=transform)
train_loader = torch.utils.data.DataLoader(dataset=train_dataset, batch_size=batch_size, shuffle=True)
test_loader = torch.utils.data.DataLoader(dataset=test_dataset, batch_size=batch_size, shuffle=False)
classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
dataiter = iter(train_loader)
images, labels = dataiter.next()
#定义网络
class BasicConv2d(torch.nn.Module):
def __init__(self, in_channels, out_channels, **kwargs):
super(BasicConv2d, self).__init__()
self.conv = torch.nn.Conv2d(in_channels, out_channels, **kwargs)
self.batchnorm = torch.nn.BatchNorm2d(out_channels)
self.relu = torch.nn.ReLU(inplace=True)
def forward(self, x):
x = self.conv(x)
x = self.batchnorm(x)
x = self.relu(x)
return x
# Define InceptionAux.
class InceptionAux(torch.nn.Module):
def __init__(self, in_channels, num_classes):
super(InceptionAux, self).__init__()
self.avgpool = torch.nn.AvgPool2d(kernel_size=2, stride=2)
self.conv = BasicConv2d(in_channels, 128, kernel_size=1)
self.fc1 = torch.nn.Sequential(torch.nn.Linear(2 * 2 * 128, 256))
self.fc2 = torch.nn.Linear(256, num_classes)
def forward(self, x):
out = self.avgpool(x)
out = self.conv(out)
out = out.view(out.size(0), -1)
out = torch.nn.functional.dropout(out, 0.5, training=self.training)
out = torch.nn.functional.relu(self.fc1(out), inplace=True)
out = torch.nn.functional.dropout(out, 0.5, training=self.training)
out = self.fc2(out)
return out
class Inception(torch.nn.Module):
def __init__(self, in_channels, ch1x1, ch3x3red, ch3x3, ch5x5red, ch5x5, pool_proj):
super(Inception, self).__init__()
self.branch1 = BasicConv2d(in_channels, ch1x1, kernel_size=1)
self.branch2 = torch.nn.Sequential(BasicConv2d(in_channels, ch3x3red, kernel_size=1),
BasicConv2d(ch3x3red, ch3x3, kernel_size=3, padding=1))
self.branch3 = torch.nn.Sequential(BasicConv2d(in_channels, ch5x5red, kernel_size=1),
BasicConv2d(ch5x5red, ch5x5, kernel_size=5, padding=2))
self.branch4 = torch.nn.Sequential(torch.nn.MaxPool2d(kernel_size=3, stride=1, padding=1),
BasicConv2d(in_channels, pool_proj, kernel_size=1))
def forward(self, x):
branch1 = self.branch1(x)
branch2 = self.branch2(x)
branch3 = self.branch3(x)
branch4 = self.branch4(x)
outputs = [branch1, branch2, branch3, branch4]
return torch.cat(outputs, 1)
# Define GooLeNet.
class GoogLeNet(torch.nn.Module):
def __init__(self, num_classes, aux_logits=True, init_weights=False):
super(GoogLeNet, self).__init__()
self.aux_logits = aux_logits
self.conv1 = BasicConv2d(3, 64, kernel_size=4, stride=2, padding=3)
self.maxpool1 = torch.nn.MaxPool2d(kernel_size=2, stride=2, ceil_mode=True)
self.conv2 = BasicConv2d(64, 64, kernel_size=1)
self.conv3 = BasicConv2d(64, 192, kernel_size=3, padding=1)
self.maxpool2 = torch.nn.MaxPool2d(kernel_size=2, stride=1, ceil_mode=True)
self.inception3a = Inception(192, 64, 96, 128, 16, 32, 32)
self.inception3b = Inception(256, 128, 128, 192, 32, 96, 64)
self.maxpool3 = torch.nn.MaxPool2d(kernel_size=2, stride=2, ceil_mode=True)
self.inception4a = Inception(480, 192, 96, 208, 16, 48, 64)
self.inception4b = Inception(512, 160, 112, 224, 24, 64, 64)
self.inception4c = Inception(512, 128, 128, 256, 24, 64, 64)
self.inception4d = Inception(512, 112, 144, 288, 32, 64, 64)
self.inception4e = Inception(528, 256, 160, 320, 32, 128, 128)
self.maxpool4 = torch.nn.MaxPool2d(kernel_size=2, stride=2, ceil_mode=True)
self.inception5a = Inception(832, 256, 160, 320, 32, 128, 128)
self.inception5b = Inception(832, 384, 192, 384, 48, 128, 128)
if self.aux_logits:
self.aux1 = InceptionAux(512, num_classes)
self.aux2 = InceptionAux(528, num_classes)
self.avgpool = torch.nn.AdaptiveAvgPool2d((1, 1))
self.dropout = torch.nn.Dropout(0.4)
self.fc = torch.nn.Linear(1024, num_classes)
if init_weights:
self._initialize_weights()
def forward(self, x):
x = self.conv1(x)
x = self.maxpool1(x)
x = self.conv2(x)
x = self.conv3(x)
x = self.maxpool2(x)
x = self.inception3a(x)
x = self.inception3b(x)
x = self.maxpool3(x)
x = self.inception4a(x)
if self.training and self.aux_logits: # eval model lose this layer
aux1 = self.aux1(x)
x = self.inception4b(x)
x = self.inception4c(x)
x = self.inception4d(x)
if self.training and self.aux_logits: # eval model lose this layer
aux2 = self.aux2(x)
x = self.inception4e(x)
x = self.maxpool4(x)
x = self.inception5a(x)
x = self.inception5b(x)
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.dropout(x)
x = self.fc(x)
if self.training and self.aux_logits: # eval model lose this layer
return x, aux2, aux1
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, torch.nn.Conv2d):
torch.nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
if m.bias is not None:
torch.nn.init.constant_(m.bias, 0)
elif isinstance(m, torch.nn.Linear):
torch.nn.init.normal_(m.weight, 0, 0.01)
torch.nn.init.constant_(m.bias, 0)
net = GoogLeNet(10, False, True).to(device)
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(net.parameters(), lr=0.001, betas=(0.9, 0.999), eps=1e-08, weight_decay=0)
def update_lr(optimizer, lr):
for param_group in optimizer.param_groups:
param_group['lr'] = lr
#训练网络
total_step = len(train_loader)
curr_lr = learning_rate
for epoch in range(num_epochs):
gc.collect()
torch.cuda.empty_cache()
net.train()
for i, (images, labels) in enumerate(train_loader):
images = images.to(device)
labels = labels.to(device)
outputs = net(images)
loss = criterion(outputs, labels)
optimizer.zero_grad()
loss.backward()
optimizer.step()
if (i+1) % 100 == 0:
print ('Epoch [{}/{}], Step [{}/{}], Loss {:.4f}'.format(epoch+1, num_epochs, i+1, total_step, loss.item()))
if (epoch+1) % 20 == 0:
curr_lr /= 3
update_lr(optimizer, curr_lr)
torch.save(net.state_dict(), './model/cifar-10-cnn-geoglenet.pt')
#计算精度
net.eval()
with torch.no_grad():
correct = 0
total = 0
for images, labels in test_loader:
images = images.to(device)
labels = labels.to(device)
outputs = net(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy of the model on the test images: {} %'.format(100 * correct / total))边栏推荐
- I want to do large screen data visualization application feature analysis
- P2704 [NOI2001] 炮兵阵地(状压dp)
- Conversion between JSON and object
- [cocos creator] Click the button to switch the interface
- Golang的range
- Clip Related Script
- WPF:解决MaterialDesign:DialogHost 无法关闭问题
- Free use until 2015 -- viz artist multi touch plug-in package
- Storage of data
- Unity2019_ Lighting system
猜你喜欢

Free use until 2015 -- viz artist multi touch plug-in package
C#课程设计之员工信息管理系统

Transplantation of freetype Library

Unity performance optimization
CLion-Toolchains are not configured Configure Disable profile问题解决
What is a data type? What is the use of data types?

Storage of data

L'installateur a été installé avec une erreur inattendue
![[cocos creator] Click the button to switch the interface](/img/b8/f0fd54a2a197cbfd788990e2806b52.png)
[cocos creator] Click the button to switch the interface

Worldview satellite remote sensing image data / meter resolution remote sensing image
随机推荐
[cocos creator] Click the button to switch the interface
Ventuz Foundation Series "one step at the door"
Multi traveling salesman problem -- overview of formula and solution process
Basic operation and process control
P1896 [SCOI2005] 互不侵犯(状压dp)
P2704 [noi2001] artillery position (shape pressure DP)
链式长取值
*p++、*++p、++*p、(*p)++
Haproxy+kept build 01
Golang 字符串分割,替换和截取
Encoding and decoding of golang URL
C language - Introduction - essence Edition - take you into programming (I)
jupyter远程服务器配置以及服务器开机自启
Golang time format sorting
tslib库的移植
Golang的range
Conversion between golang JSON format and structure
What is BFC?
2020-12-12
STM32F103 SPI (pit Diary)