当前位置:网站首页>连续时间系统的性能分析(2)-二阶系统性能改善方式PID,PR
连续时间系统的性能分析(2)-二阶系统性能改善方式PID,PR
2022-07-27 16:22:00 【Miracle Fan】
自控原理学习笔记
自控原理学习笔记专栏
文章目录
4. 二阶系统性能改善
4.1 P-Proportion

4.1.1 开环传递函数:
L ( s ) = K p w n 2 s ( s + 2 ζ w n ) L(s)=\frac{K_pw_n^2}{s(s+2\zeta w_n)} L(s)=s(s+2ζwn)Kpwn2
4.1.2 系统闭环传递函数:
Φ ( s ) = Y ( s ) R ( s ) = K p w n 2 s 2 + 2 ζ w n s + K p w n 2 = w n p 2 s 2 + 2 ζ p w n p s + w n p 2 \Phi(s)=\frac{Y(s)}{R(s)}=\frac{K_pw_n^2}{s^2+2\zeta w_ns+K_pw_n^2}=\frac{w_{np}^2}{s^2+2\zeta_pw_{np}s+w_{np}^2} Φ(s)=R(s)Y(s)=s2+2ζwns+Kpwn2Kpwn2=s2+2ζpwnps+wnp2wnp2
4.1.3对比典型环节
特征根的实部未变化
闭环增益 Φ ( s ) ∣ s = 0 = 1 \Phi(s)|_{s=0}=1 Φ(s)∣s=0=1不变化;开环速度增益 K = s 1 L ( s ) ∣ s = 0 = K p w n 2 ζ K=s^1L(s)|_{s=0}=\frac{K_pw_n}{2\zeta} K=s1L(s)∣s=0=2ζKpwn
固有频率 w n p = K p w n w_{np}=\sqrt{K_p}w_n wnp=Kpwn
阻尼系数 ζ p = ζ / K p \zeta_p=\zeta/\sqrt{K_p} ζp=ζ/Kp
调节时间基本不变
4.2 PD-Proportion Derivate

4.2.1开环传递函数
L ( s ) = ( T d s + 1 ) w n 2 s ( s + 2 ζ w n ) L(s)=\frac{(T_ds+1) w_{n}^{2}}{ s\left(s+2\zeta w_{n}\right)} L(s)=s(s+2ζwn)(Tds+1)wn2
4.2.2闭环传递函数
Φ ( s ) = Y ( s ) R ( s ) = w n 2 ( T d s + 1 ) s 2 + 2 ζ w n s + w n 2 T d s + w n 2 = w n 2 ( T d s + 1 ) s 2 + 2 ζ d w n s + w n 2 \Phi(s)=\frac{Y(s)}{R(s)}=\frac{w_n^2(T_ds+1)}{s^2+2\zeta w_ns+w_n^2T_ds+w_n^2}=\frac{w_{n}^2(T_ds+1)}{s^2+2\zeta_dw_{n}s+w_{n}^2} Φ(s)=R(s)Y(s)=s2+2ζwns+wn2Tds+wn2wn2(Tds+1)=s2+2ζdwns+wn2wn2(Tds+1)
4.2.3对比典型环节
闭环增益为1,开环增益为 K = w n 2 ζ K=\frac{w_n}{2\zeta} K=2ζwn
自然频率没有变换,阻尼系数变大,超调量变小—— ζ d = ζ + T d w n 2 \zeta_d=\zeta+\frac{T_dw_n}{2} ζd=ζ+2Tdwn
系统阶跃响应等价于增加了一项冲激响应,幅度为 T d T_d Td倍,加快系统动态响应
Y ( s ) = w n 2 s 2 + 2 ζ d w n s + w n 2 ∗ 1 s + w n 2 ⋅ T d s 2 + 2 ζ d w n s + w n 2 Y(s)=\frac{w_{n}^2}{s^2+2\zeta_dw_{n}s+w_{n}^2}*\frac{1}{s}+\frac{w_{n}^2 \cdot T_d}{s^2+2\zeta_dw_{n}s+w_{n}^2} Y(s)=s2+2ζdwns+wn2wn2∗s1+s2+2ζdwns+wn2wn2⋅Td
4.2.4 定性结论
- 增加系统阻尼比,不影响系统的自然频率,从而抑制振荡,使超调减弱,改善系统平稳性。
- 零点出现,加快系统的响应速度
- 微分对高频噪声具有放大作用,输入噪声较大时,不宜使用
4.3 PI-Proportion Integral

4.3.1 开环传递函数
L ( s ) = ( T i s + 1 ) w n 2 T i s 2 ( s + 2 ζ w n ) L(s)=\frac{(T_is+1) w_{n}^{2}}{T_{i} s^{2}\left(s+2\zeta w_{n}\right)} L(s)=Tis2(s+2ζwn)(Tis+1)wn2
4.3.2 闭环传递函数
Y ( s ) R ( s ) = ω n 2 ( T i s + 1 ) T i s 3 + 2 T i ζ ω n s 2 + T i ω n 2 s + ω n 2 Y ( s ) D ( s ) = ω n 2 T i s T i s 3 + 2 T i ζ ω n s 2 + T i ω n 2 s + ω n 2 \frac{Y(s)}{R(s)}=\frac{\omega_{\mathrm{n}}^{2}\left(T_{\mathrm{i}} s+1\right)}{T_{\mathrm{i}} s^{3}+2 T_{\mathrm{i}} \zeta \omega_{\mathrm{n}} s^{2}+T_{\mathrm{i}} \omega_{\mathrm{n}}{ }^{2} s+\omega_{\mathrm{n}}^{2}}\\ \frac{Y(s)}{D(s)}=\frac{\omega_{\mathrm{n}}^{2} T_{\mathrm{i}} s}{T_{\mathrm{i}} s^{3}+2 T_{\mathrm{i}} \zeta \omega_{\mathrm{n}} s^{2}+T_{\mathrm{i}} \omega_{\mathrm{n}}{ }^{2} s+\omega_{\mathrm{n}}^{2}} R(s)Y(s)=Tis3+2Tiζωns2+Tiωn2s+ωn2ωn2(Tis+1)D(s)Y(s)=Tis3+2Tiζωns2+Tiωn2s+ωn2ωn2Tis
4.3.3对比典型环节
- 给定到输出闭环位置增益为1
- 开环加速度增益为 K = s 2 L ( s ) ∣ s = 0 = w n 2 ζ T i K=s^2L(s)|_{s=0}=\frac{w_n}{2\zeta T_i} K=s2L(s)∣s=0=2ζTiwn
- 扰动到输出传递函数静态增益为0
- 系统阶次由1阶变为2阶
4.3.4 定性结论
- 系统阶次上升,不恰当选择参数可能造成产生RHP极点
- 引入积分环节,消除恒值扰动引起的误差
- 积分环节降低响应速度,响应初期可能增加超调量
4.4 PID-Proportion Integral Derivate
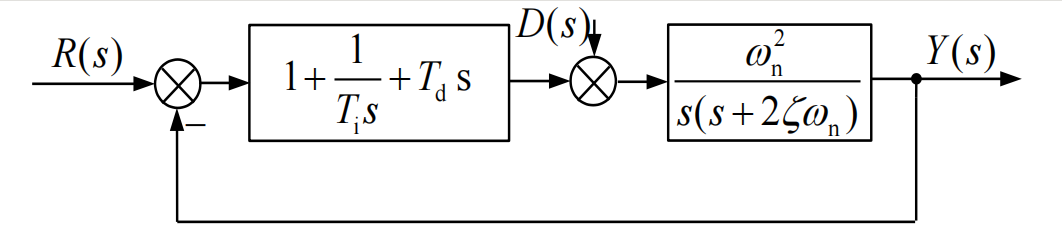
4.4.1 开环传递函数
L ( s ) = ( T i T d s 2 + T i s 1 ) w n 2 T i s 2 ( s + 2 ζ w n ) L(s)=\frac{(T_iT_ds^2+T_is1) w_{n}^{2}}{T_{i} s^{2}\left(s+2\zeta w_{n}\right)} L(s)=Tis2(s+2ζwn)(TiTds2+Tis1)wn2
4.4.2闭环传递函数
Y ( s ) R ( s ) = T d T i ω n 2 s 2 + T i ω n 2 s + ω n 2 T i s 3 + ( 2 T i ζ ω n + T d T i ω n 2 ) s 2 + T i ω n 2 s + ω n 2 Y ( s ) D ( s ) = ω n 2 T i s T i s 3 + ( 2 T i ζ ω n + T d T i ω n 2 ) s 2 + T i ω n 2 s + ω n 2 \frac{Y(s)}{R(s)}=\frac{T_{\mathrm{d}} T_{\mathrm{i}} \omega_{\mathrm{n}}^{2} s^{2}+T_{\mathrm{i}} \omega_{\mathrm{n}}^{2} s+\omega_{\mathrm{n}}^{2}}{T_{\mathrm{i}} s^{3}+\left(2 T_{\mathrm{i}} \zeta \omega_{\mathrm{n}}+T_{\mathrm{d}} T_{\mathrm{i}} \omega_{\mathrm{n}}^{2}\right) s^{2}+T_{\mathrm{i}} \omega_{\mathrm{n}}^{2} s+\omega_{\mathrm{n}}^{2}}\\ \frac{Y(s)}{D(s)}=\frac{\omega_{\mathrm{n}}^{2} T_{\mathrm{i}} s}{T_{\mathrm{i}} s^{3}+\left(2 T_{\mathrm{i}} \zeta \omega_{\mathrm{n}}+T_{\mathrm{d}} T_{\mathrm{i}} \omega_{\mathrm{n}}^{2}\right) s^{2}+T_{\mathrm{i}} \omega_{\mathrm{n}}^{2} s+\omega_{\mathrm{n}}^{2}} R(s)Y(s)=Tis3+(2Tiζωn+TdTiωn2)s2+Tiωn2s+ωn2TdTiωn2s2+Tiωn2s+ωn2D(s)Y(s)=Tis3+(2Tiζωn+TdTiωn2)s2+Tiωn2s+ωn2ωn2Tis
4.4.3 对比典型环节
- 给定到输出闭环位置增益为1
- 开环加速度增益为 K = s 2 L ( s ) ∣ s = 0 = w n 2 ζ T i K=s^2L(s)|_{s=0}=\frac{w_n}{2\zeta T_i} K=s2L(s)∣s=0=2ζTiwn
- 扰动到输出传递函数静态增益为0
- 系统阶次由1阶变为2阶
4.4.4定性结论
- P——提升响应速度;I——消除稳态误差;D——适当加快暂态响应,压制超调量
- 消除恒值扰动引起误差。
4.5微分反馈

4.5.1 开环传递函数:
L ( s ) = ω n 2 s ( 2 ζ ω n + k ω n 2 ) L(s)=\frac{\omega_{\mathrm{n}}^{2}}{s\left(2 \zeta \omega_{\mathrm{n}}+k \omega_{\mathrm{n}}{ }^{2}\right) } L(s)=s(2ζωn+kωn2)ωn2
4.5.2 闭环传递函数:
Y ( s ) R ( s ) = ω n 2 s 2 + ( 2 ζ ω n + k ω n 2 ) s + ω n 2 \frac{Y(s)}{R(s)}=\frac{\omega_{\mathrm{n}}^{2}}{s^{2}+\left(2 \zeta \omega_{\mathrm{n}}+k \omega_{\mathrm{n}}{ }^{2}\right) s+\omega_{\mathrm{n}}^{2}} R(s)Y(s)=s2+(2ζωn+kωn2)s+ωn2ωn2
4.5.3 对比典型环节
- 闭环位置增益为1
- 开环速度增益减小为 K = w n 2 2 ζ w n + k w n 2 K=\frac{w_n^2}{2\zeta w_n+kw_n^2} K=2ζwn+kwn2wn2
- 自然频率未变
- 阻尼系数变大 ζ d f = ζ + 1 2 k w n \zeta_{df}=\zeta+\frac{1}{2}kw_n ζdf=ζ+21kwn
4.4.5定性结论
- 不影响自然频率,使系统阻尼比增加,减小超调量
- 降低开环增益,加大系统斜坡输入稳态误差
- 不形成闭环零点,输出平稳性优于PD调节
边栏推荐
- 瑞吉外卖sql表
- Uni app for wechat login (to be finished)
- MySQL set validate_ Adding skip grant tables after password=off failed to start the service
- filebeat.yml配置文件关于多个服务的配置问题
- Typeerror: conv2d(): argument 'padding' (position 5) must be multiple of ints, not STR [error]
- Arrays and objects in JS
- Valueerror: found input variables with inconsistent numbers of samples: [80019456, 26673152] [error reporting]
- Nodejs 模板引擎ejs
- JS中的数组与对象
- MySQL 04 高级查询(二)
猜你喜欢

订单超时取消 及 按类别查询商品

Join query and subquery
连接查询和子查询

Led with fan eye protection learning table lamp touch chip-dlt8s12a

个人中心--订单业务流程

Uni app for wechat login (to be finished)

Hbuilder submission code

Led learning eye protection table lamp touch chip-dlt8t10s-jericho

`this.$ Emit ` the child component passes multiple parameters to the parent component
Order timeout cancellation and commodity query by category
随机推荐
Interviewer: what do you think is your biggest weakness?
log4j. Properties log details
怎样产生标准分布或高斯分布的随机数
建木持续集成平台v2.5.2发布
WinForm remove the close button in the upper right corner
Wechat payment and payment callback
Day 3 of leetcode question brushing
Docker - docker installation, MySQL installation on docker, and project deployment on docker
Typescript installation
LED带风扇护眼学习台灯触摸芯片-DLT8S12A
The great idea of NS2
nacos显示服务注册地址错误
Aircraft battle with enemy aircraft
【npm】 无法将“npm”项识别为 cmdlet、函数、脚本文件或可运行程序的名称。请检查名称的拼写,如果包括路径,请确保路径正确,然后再试一次。
Zhaoqi scientific and technological innovation introduces high-level talents at home and abroad and connects innovation and entrepreneurship projects
WSN Journal indexed by SCI(转)
C file and folder input / output stream code
CMD command
Extension of ES6 value
v-if,v-else,v-for