当前位置:网站首页>Pytorch框架学校记录11——搭建小实战完整细节
Pytorch框架学校记录11——搭建小实战完整细节
2022-08-01 20:36:00 【柚子Roo】
Pytorch框架学校记录11——搭建小实战完整细节
1. 搭建小实战和Sequential的使用
我们搭建了一个CIFAR10模型,下面的代码是未使用Sequential的情况。
import torch
from torch import nn
class Test(nn.Module):
def __init__(self):
super(Test, self).__init__()
self.conv1 = nn.Conv2d(in_channels=3, out_channels=32, kernel_size=5, padding=2)
self.maxpool1 = nn.MaxPool2d(kernel_size=2)
self.conv2 = nn.Conv2d(in_channels=32, out_channels=32, kernel_size=5, padding=2)
self.maxpool2 = nn.MaxPool2d(kernel_size=2)
self.conv3 = nn.Conv2d(in_channels=32, out_channels=64, kernel_size=5, padding=2)
self.maxpool3 = nn.MaxPool2d(kernel_size=2)
self.flatten = nn.Flatten()
self.hidden = nn.Linear(in_features=1024, out_features=64)
self.fc = nn.Linear(in_features=64, out_features=10)
def forward(self, input):
input = self.conv1(input)
input = self.maxpool1(input)
input = self.conv2(input)
input = self.maxpool2(input)
input = self.conv3(input)
input = self.maxpool3(input)
input = self.flatten(input)
input = self.hidden(input)
output = self.fc(input)
return output
x = torch.tensor([0.1, 0.2, 0.3])
print(x.shape)
y = torch.tensor([1])
x = torch.reshape(x, (1, 3))
print(x)
2. 损失函数和反向传播
torch.nn.CrossEntropyLoss(weight=None, size_average=None, ignore_index=- 100, reduce=None, reduction=‘mean’, label_smoothing=0.0)
参数:
- Input: Shape (C), (N, C)(N,C) or (N, C, d_1, d_2, …, d_K)(N,C,d1,d2,…,d**K) with K \geq 1K≥1 in the case of K-dimensional loss.
- Target: If containing class indices, shape ()(), (N)(N) or (N, d_1, d_2, …, d_K)(N,d1,d2,…,d**K) with K \geq 1K≥1 in the case of K-dimensional loss where each value should be between [0, C)[0,C). If containing class probabilities, same shape as the input and each value should be between [0, 1][0,1].
在这里我们以交叉熵损失函数为例,backward()方法为反向传播算法。
from torch import nn
import torchvision
from torch.utils.data import DataLoader
dataset = torchvision.datasets.CIFAR10(root='dataset', train=False, transform=torchvision.transforms.ToTensor(), download=True)
dataloader = DataLoader(dataset, 64)
class Test(nn.Module):
def __init__(self):
super(Test, self).__init__()
self.conv1 = nn.Conv2d(in_channels=3, out_channels=32, kernel_size=5, padding=2)
self.maxpool1 = nn.MaxPool2d(kernel_size=2)
self.conv2 = nn.Conv2d(in_channels=32, out_channels=32, kernel_size=5, padding=2)
self.maxpool2 = nn.MaxPool2d(kernel_size=2)
self.conv3 = nn.Conv2d(in_channels=32, out_channels=64, kernel_size=5, padding=2)
self.maxpool3 = nn.MaxPool2d(kernel_size=2)
self.flatten = nn.Flatten()
self.hidden = nn.Linear(in_features=1024, out_features=64)
self.fc = nn.Linear(in_features=64, out_features=10)
def forward(self, input):
input = self.conv1(input)
input = self.maxpool1(input)
input = self.conv2(input)
input = self.maxpool2(input)
input = self.conv3(input)
input = self.maxpool3(input)
input = self.flatten(input)
input = self.hidden(input)
output = self.fc(input)
return output
test = Test()
loss = nn.CrossEntropyLoss()
step = 0
for data in dataloader:
imgs, target = data
output = test(imgs)
res = loss(output, target)
res.backward()
print(res)
3. 优化器
优化器的作用:将模型的中的参数根据要求进行实时调整更新,使得模型变得更加优良。
在这里我们使用的是随机梯度下降法(SGD)作为优化器的优化依据。
from torch import nn
import torchvision
import torch
from torch.utils.data import DataLoader
dataset = torchvision.datasets.CIFAR10(root='dataset', train=False, transform=torchvision.transforms.ToTensor(), download=True)
dataloader = DataLoader(dataset, 64)
class Test(nn.Module):
def __init__(self):
super(Test, self).__init__()
self.conv1 = nn.Conv2d(in_channels=3, out_channels=32, kernel_size=5, padding=2)
self.maxpool1 = nn.MaxPool2d(kernel_size=2)
self.conv2 = nn.Conv2d(in_channels=32, out_channels=32, kernel_size=5, padding=2)
self.maxpool2 = nn.MaxPool2d(kernel_size=2)
self.conv3 = nn.Conv2d(in_channels=32, out_channels=64, kernel_size=5, padding=2)
self.maxpool3 = nn.MaxPool2d(kernel_size=2)
self.flatten = nn.Flatten()
self.hidden = nn.Linear(in_features=1024, out_features=64)
self.fc = nn.Linear(in_features=64, out_features=10)
def forward(self, input):
input = self.conv1(input)
input = self.maxpool1(input)
input = self.conv2(input)
input = self.maxpool2(input)
input = self.conv3(input)
input = self.maxpool3(input)
input = self.flatten(input)
input = self.hidden(input)
output = self.fc(input)
return output
test = Test()
loss = nn.CrossEntropyLoss()
step = 0
optimer = torch.optim.SGD(params=test.parameters(), lr=0.01)
for epoch in range(20):
loss_sum = 0.0
for data in dataloader:
imgs, target = data
output = test(imgs)
res = loss(output, target)
optimer.zero_grad()
res.backward()
optimer.step()
loss_sum += res
print(loss_sum)
4. 现有网络模型的使用及修改
我们使用Pytorch框架中的VGG16模型,并将该模型的全连接层的输出特征的个数设置为10,
torchvision.models.vgg16(***, weights: Optional[torchvision.models.vgg.VGG16_Weights] = None, progress: bool = True, **kwargs: Any)
参数:
pretrained:设置为True代表加载预训练模型
对现有网络模型的修改可分为两种方式,一种为添加,另一种为修改。
详细的操作方法如下:
import torch
from torch import nn
import torchvision
vgg_true = torchvision.models.vgg16(pretrained=True)
vgg_false = torchvision.models.vgg16(pretrained=False)
vgg_true.add_module("add_model", nn.Linear(in_features=1000, out_features=10))
print(vgg_true)
vgg_false.classifier[6] = nn.Linear(in_features=4096, out_features=10)
print(vgg_false)
5. 模型的保存与读取
模型的保存有两种方式:
import torchvision
import torch
vgg16 = torchvision.models.vgg16(pretrained=False)
# 保存方式1 模型结构+模型参数
torch.save(vgg16, "vgg16_methods1.pth")
# 保存方式2 模型参数(官方推荐)
torch.save(vgg16.state_dict(), "vgg16_methods2.pth")
模型的加载方式也有两种方式
import torch
import torchvision
# 方式1 加载模型
vgg16_model1 = torch.load("vgg16_methods1.pth")
print(vgg16_model1)
# 方式2 加载模型
vgg16 = torchvision.models.vgg16(pretrained=False)
vgg16.state_dict(torch.load("vgg16_methods2.pth"))
print(vgg16)
边栏推荐
- 用户体验好的Button,在手机上不应该有Hover态
- Excel advanced drawing techniques, 100 (22) - how to respectively the irregular data
- 洛谷 P2440 木材加工
- Interpretation of the meaning of each dimension of two-dimensional, three-dimensional, and four-dimensional matrices
- 作为程序员你应该会的软件
- LTE time domain and frequency domain resources
- The Internet giant development process
- Failed to re-init queues : Illegal queue capacity setting (abs-capacity=0.6) > (abs-maximum-capacity
- [Personal Work] Remember - Serial Logging Tool
- [Personal work] Wireless network image transmission module
猜你喜欢
![[Multi-task learning] Modeling Task Relationships in Multi-task Learning with Multi-gate Mixture-of-Experts KDD18](/img/f3/a8813759e5b4dd4b4132e65672fc3f.png)
[Multi-task learning] Modeling Task Relationships in Multi-task Learning with Multi-gate Mixture-of-Experts KDD18

Convolutional Neural Network (CNN) mnist Digit Recognition - Tensorflow
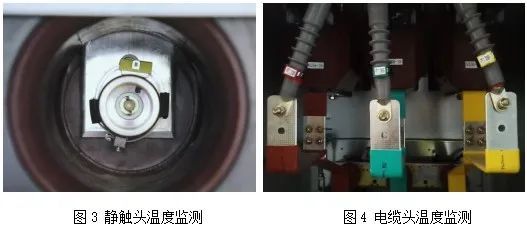
【节能学院】智能操控装置在高压开关柜的应用
研究生新同学,牛人看英文文献的经验,值得你收藏
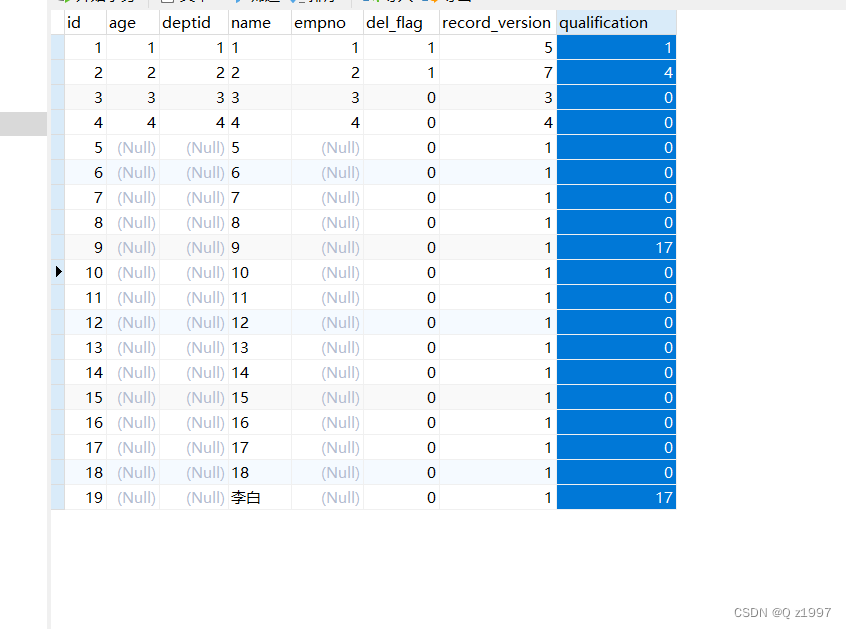
数据库单字段存储多个标签(位移操作)
我的驾照考试笔记(1)

外骨骼机器人(七):标准步态数据库
Does LabVIEW really close the COM port using VISA Close?

数据库内核面试中我不会的问题(1)

Buttons with good user experience should not have hover state on mobile phones
随机推荐
Goroutine Leaks - The Forgotten Sender
[Multi-task model] Progressive Layered Extraction: A Novel Multi-Task Learning Model for Personalized (RecSys'20)
LinkedList源码分享
基于FPGA的任意字节数(单字节、多字节)的串口(UART)发送(含源码工程)
SIPp installation and use
我的驾照考试笔记(2)
如何用Chrome编辑以及调试代码
面试突击70:什么是粘包和半包?怎么解决?
LinkedList source code sharing
New graduate students, great experience in reading English literature, worthy of your collection
有用的网站
Convolutional Neural Network (CNN) mnist Digit Recognition - Tensorflow
瀚高数据导入
系统收集集
Godaddy域名解析速度慢问题以及如何使用DNSPod解析解决
[Energy Conservation Institute] Application of Intelligent Control Device in High Voltage Switchgear
Protocol Buffer usage
二维、三维、四维矩阵每个维度含义解释
STAHL触摸屏维修一体机显示屏ET-316-TX-TFT常见故障
Redis does web page UV statistics