当前位置:网站首页>Livox lidar+ Hikvision camera real-time 3D reconstruction based on loam to generate RGB color point cloud
Livox lidar+ Hikvision camera real-time 3D reconstruction based on loam to generate RGB color point cloud
2022-06-27 22:45:00 【lucky li】
Livox Lidar + HIKROBOT Camera series
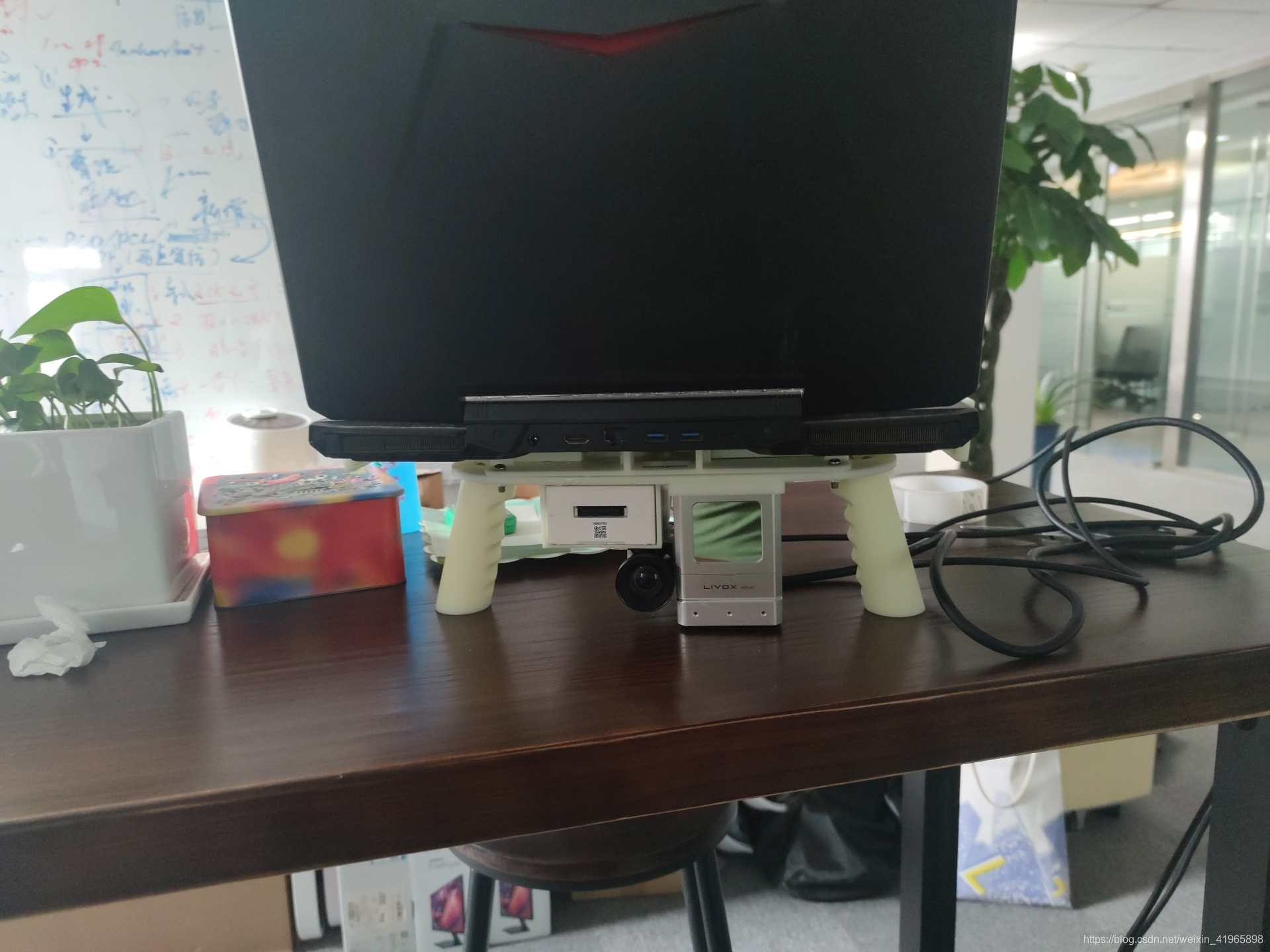
Recently in the development of camera and laser radar fusion slam Algorithm , It is mainly used for 3D reconstruction , Want to get a real-time color point cloud map , The sensors are Hikvision's industrial camera and Dajiang's solid-state laser radar .
The sea, Camera MVS Linux SDK Secondary development package ROS packge Process record (c++)
Livox Lidar+ The sea, Camera Generate color point cloud in real time
Livox Lidar+ The sea, Camera Real time 3D reconstruction generation RGB Color point cloud map
Preface
The goal is to make use of Livox Lidar+ The sea, Camera Real time 3D reconstruction generation RGB Colored point cloud , The algorithm is based on loam And the optimization and improvement of its various variants , Open source https://github.com/luckyluckydadada/livox_color_mapping.
of loam And its various variants of the principle of online analysis of many , No explanation here , Various loam For the arrangement of articles on principles, see : Various versions loam Arrangement
livox_color_mapping I'm in a loam Version code supports generation with RGB A color map of information , And the code is Detailed Chinese Notes , welcome star
pipline
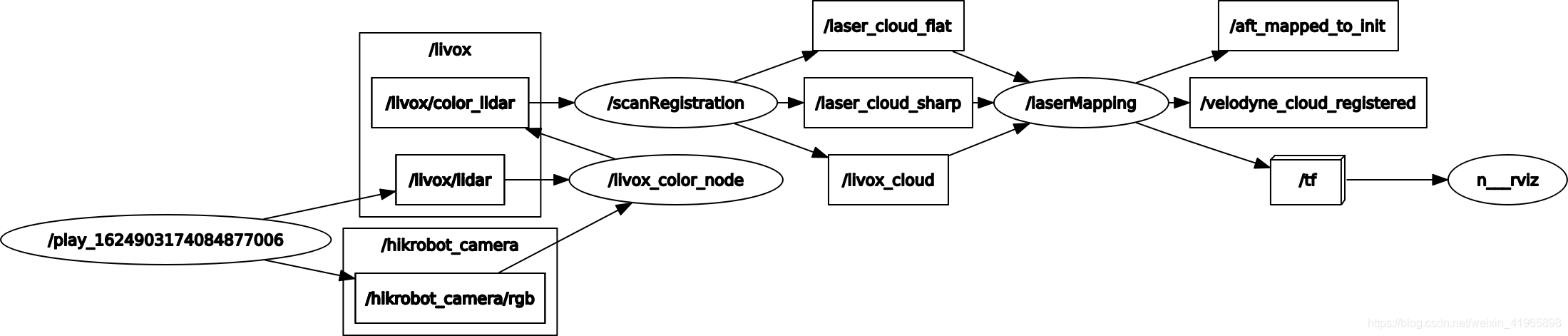
- utilize livox ros The nodes in the package call the lidar generation /livox/lidar(Topic) ;
- utilize hikrobot ros The nodes in the package call the camera generation /hikrobot_camera/rgb(Topic);
- adopt livox_color ros package 【 see Livox Lidar+ The sea, Camera Generate color point cloud in real time 】 Node subscription in /hikrobot_camera/rgb(Topic) and /livox/lidar(Topic) real-time processing , And generate color point cloud /livox/color_lidar(Topic);
- adopt livox_color_mapping ros The nodes in the package subscribe /livox/color_lidar(Topic), Generate a color point cloud map , Please be there. livox_color_mapping/launch/mapping_mid_color.launch Specify the map saving path in the file /home/xxx, The saved format is bin Formal pcd file , Can be directly used pcl_viewer all_points.pcd Open view . It can also be converted to ply Format :pcl_pcd2ply demo.pcd demo.ply
install

Please complete the dependency installation first :
The sea, Camera MVS Linux SDK Secondary development package ROS packge Process record (c++)
Livox Lidar+ The sea, Camera Generate color point cloud in real time
livox_color_mapping install :
cd ws_livox/src # front livox ros driver Installation directory (https://github.com/Livox-SDK/livox_ros_driver)
git clone https://github.com/luckyluckydadada/livox_color_mapping.git
cd ..
catkin_make
function
Please combine the previous 《pipeline》 Execute against , The execution of a terminal corresponds to a principle .
terminal 1:
cd ~/ws_livox
source devel/setup.bash
roslaunch livox_ros_driver livox_lidar.launch
terminal 2:
cd ~/ws_hikrobot_camera
source devel/setup.bash
roslaunch hikrobot_camera hikrobot_camera.launch
terminal 3:
cd ~/ws_livox_color
source devel/setup.bash
roslaunch livox_color color_livox-for-color-mapping.launch
terminal 4:
cd ~/ws_livox
source devel/setup.bash
# Be careful to modify mapping_mid_color.launch Medium map Storage path , Otherwise, it will overwrite the last map result
roslaunch livox_color_mapping mapping_mid_color.launch
Real time mapping effect
Outside  indoor
indoor 
边栏推荐
- Introduce you to ldbc SNB, a powerful tool for database performance and scenario testing
- 「R」使用ggpolar绘制生存关联网络图
- 结构化机器学习项目(一)- 机器学习策略
- Flask application case
- STM32与RC522简单公交卡系统的设计
- 批量处理-Excel导入模板1.1-支持多Sheet页
- 解决本地连接不上虚拟机的问题
- One to many association in MySQL to obtain the latest data in multiple tables
- 跟着存档教程动手学RNAseq分析(三):使用DESeq2进行计数标准化
- Structured machine learning project (II) - machine learning strategy (2)
猜你喜欢

九九乘法表——C语言

医美大刀,砍向00后

二维数组中修改代价最小问题【转换题意+最短路径】(Dijkstra+01BFS)
Arcgis-engine二次开发之空间关系查询与按图形查询

Exclusive interview with millions of annual salary. What should developers do if they don't fix bugs?
![[microservices] (16) -- distributed transaction Seata](/img/1b/aeb534d5a0bd40f5fc14e64bdf5aa9.png)
[microservices] (16) -- distributed transaction Seata

Deep learning has a new pit! The University of Sydney proposed a new cross modal task, using text to guide image matting

Penetration learning - shooting range chapter - detailed introduction to Pikachu shooting range (under continuous update - currently only the SQL injection part is updated)

Structured machine learning project (I) - machine learning strategy

《7天学会Go并发编程》第六天 go语言Sync.cond的应用和实现 go实现多线程联合执行
随机推荐
跟着存档教程动手学RNAseq分析(三):使用DESeq2进行计数标准化
PHP connects to database to realize user registration and login function
通过tidymodels使用XGBOOST
扁平数组和JSON树的转换
PHP连接数据库实现用户注册登录功能
爬虫笔记(1)- urllib
Mysql database experiment report (I)
Oracle obtains the beginning and end of the month time, and obtains the beginning and end of the previous month time
Contest 2050 and Codeforces Round #718 (Div. 1 + Div. 2)
Day 7 of "learning to go concurrent programming in 7 days" go language concurrent programming atomic atomic actual operation includes ABA problem
01 golang environment construction
爬虫笔记(3)-selenium和requests
Gartner focuses on low code development in China how UNIPRO practices "differentiation"
资深猎头团队管理者:面试3000顾问,总结组织出8大共性(茅生)
Is it safe to open a stock account through the account opening link given by the CICC securities manager? I want to open an account
"I make the world cooler" 2022 Huaqing vision R & D product launch was a complete success
Memoirs of actual combat: breaking the border from webshell
Crawler notes (2) - parse
[suggested collection] ABAP essays-excel-4-batch import recommended
【微服务】(十六)—— 分布式事务Seata