当前位置:网站首页>动作捕捉系统用于柔性机械臂的末端定位控制
动作捕捉系统用于柔性机械臂的末端定位控制
2022-07-31 13:29:00 【MocapLeader】
柔性机械臂是一种新型仿生机械臂,其设计受到自然界中生物结构启发,比如象鼻、章鱼爪、蚯蚓和蛇等。与传统机械臂相比,柔性机械臂可以在材料变形范围内进行任意形状的弯曲运动,通过调整自身形态在狭小复杂的空间内工作,有很强的适应能力。
柔性机械臂经常应用于医疗外科手术、空间救援、设备检修等领域。这些场景下对柔性机械臂末端作业精度要求很高,但是大多数研究都集中在了提高末端控制的重复定位精度,忽略了末端轨迹跟踪过程中的控制误差,而且柔性臂动力学模型难以准确的建立。
四川大学电气工程学院的研究人员设计了一种刚柔耦合的线驱动柔性机械臂,通过对柔性机械臂运动机理的分析,设计了基于逆动力学模型的柔性机械臂末端定位控制方案,并进行了仿真和实物样机末端定位控制实验。
柔性机械臂实物样机由机械臂本体、驱动装置和电控系统构成,其中驱动装置通过电动机带动滑台移动并牵引驱动线,完成机械臂本体的运动控制。为了准确记录柔性机械臂运动过程中末端位置的变化数据,研究人员在机械臂本体上方布置了NOKOV度量光学动作捕捉系统,并在柔性臂末端放置了一个反光标记球,利用动作捕捉相机来跟踪采集末端位置的实时数据。实验中NOKOV度量动作捕捉系统的定位精度达到亚毫米级。

研究人员对比了理想轨迹与仿真轨迹和实际轨迹(NOKOV度量动作捕捉系统采集),并分析了实物样机产生误差的原因。实验结果表明了这种基于逆动力学模型的末端定位控制算法的有效性。

参考文献:[1]马丛俊,赵涛,向国菲,任江涛,陈元科,佃松宜.基于逆运动学的柔性机械臂末端定位控制[J].机械工程学报,2021,57(13):163-171.
更多阅读:
机械臂 空间定位 位姿 | NOKOV度量动作捕捉NOKOV度量动作捕捉可提供高精度六自由度运动学数据,实现机械臂的精准定位 https://www.nokov.com/motion-capture-robotic-arm.html经典案例 | NOKOV度量动作捕捉经典案例https://www.nokov.com/support/case_studies/6.html#case-list-1
https://www.nokov.com/motion-capture-robotic-arm.html经典案例 | NOKOV度量动作捕捉经典案例https://www.nokov.com/support/case_studies/6.html#case-list-1
边栏推荐
猜你喜欢

MATLAB | 我也做了一套绘图配色可视化模板

技能大赛训练题:MS15_034漏洞验证与安全加固

Edge Cloud Explained in Simple Depth | 4. Lifecycle Management
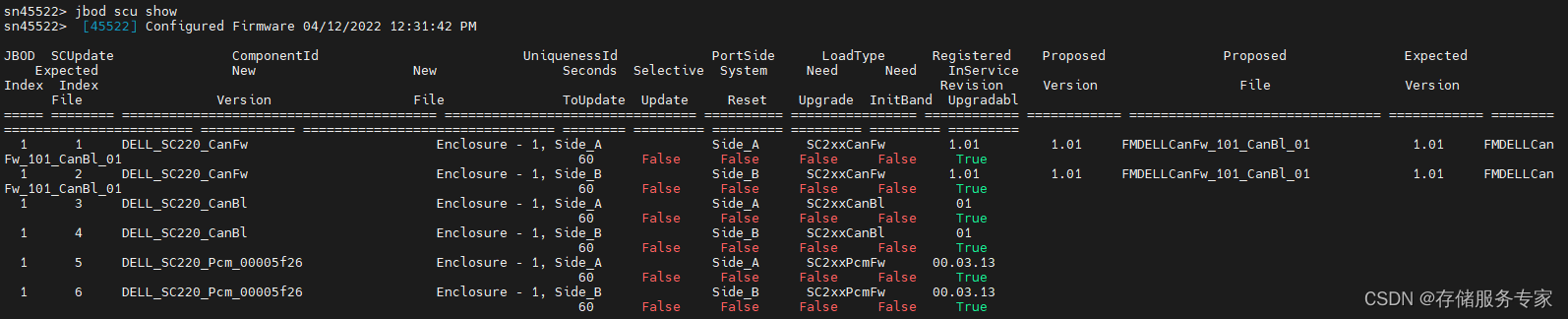
DELL SC compellent 康贝存储系统怎么抓取配置信息

ICML2022 | 面向自监督图表示学习的全粒度自语义传播

Solution for browser hijacking by hao360
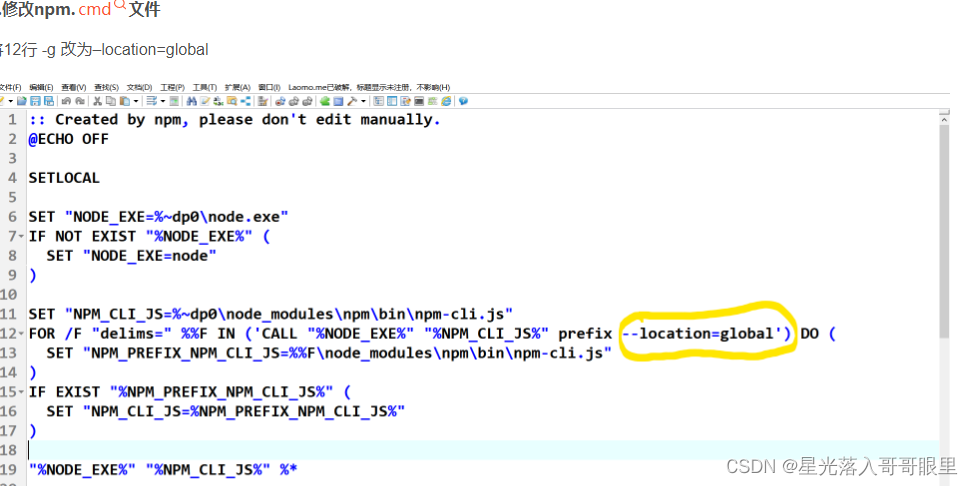
Introduction to using NPM

ERROR 1819 (HY000) Your password does not satisfy the current policy requirements
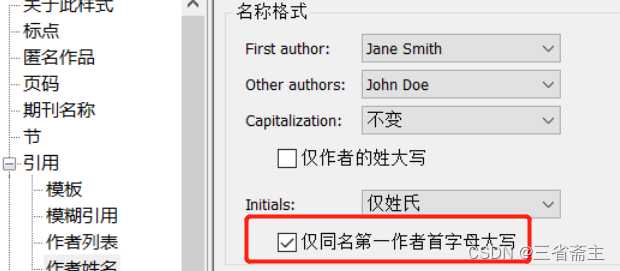
endnote引用
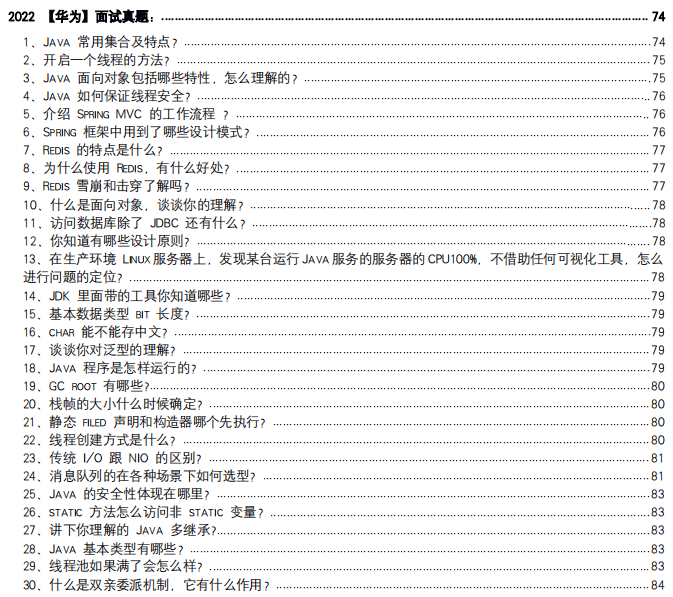
「面经分享」西北大学 | 字节 生活服务 | 一面二面三面 HR 面
随机推荐
SAP 电商云 Spartacus SSR Optimization Engine 几处 timeout 的执行顺序
网络协议及相关技术详解
golang-gin - graceful restart
go中select语句
STM32的CAN过滤器
C#获得网卡信息 NetworkInterface IPInterfaceProperties
生产力工具和插件
TensorRT安装及使用教程「建议收藏」
Selenium自动化测试之Selenium IDE
Reasons and solutions for Invalid bound statement (not found)
The importance of strategic offensive capability is much higher than strategic defensive capability
EXCEL如何快速拆分合并单元格数据
Error: npm ERR code EPERM
ASM module in SAP Ecommerce Cloud Spartacus UI and Accelerator UI
/run/NetworkManager占用空间过大
报错IDEA Terminated with exit code 1
STM32——软件SPI控制AD7705[通俗易懂]
C# control StatusStrip use
浏览器被hao360劫持解决办法
计算机复试面试问题(计算机面试常见问题)