当前位置:网站首页>1266_ Implementation analysis of FreeRTOS scheduler startup code
1266_ Implementation analysis of FreeRTOS scheduler startup code
2022-06-11 06:58:00 【grey_ csdn】
All learning summary : GreyZhang/g_FreeRTOS: learning notes about FreeRTOS. (github.com)
Take a look this time FreeRTOS What actions have been performed during the startup of .
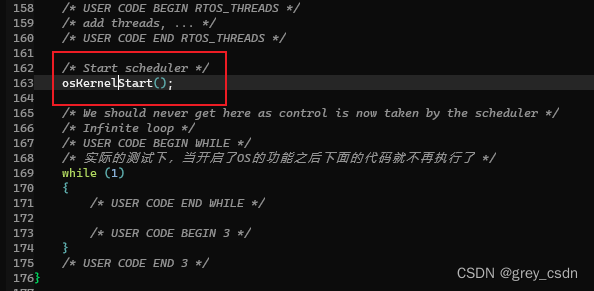
This is CubeIDE The interface started by the kernel in the generated code , This is not FreeRTOS The original interface is the result of some encapsulation . Take a look at the implementation of this interface .

The meaning of this kind of encapsulation doesn't seem very big , Because there is no substantial change , Just add an invalid return value . However , The added invalid return value is discarded during the call . therefore , This can be called directly FreeRTOS The interface of .

In my project , It can be modified according to the above form , There is no essential difference in operation .

As long as it is FreeRTOS Configured to support static storage allocation , Support static task creation mode , Then a task scheduler will be created statically before the task scheduler is started idle task.Idle task During static creation , First, get the specified stored information 、TCB Object location and stack size , Then use this information to create a static task. Last , Make a judgment about creating idle task The success of .

Information acquisition interface for storing and defining objects , The implementation is relatively simple . But this involves a new complex data structure . Combine the above two parts of code , Create in a static way idle task In fact, it does not occupy FreeRTOS Of heap Spatial .


This data structure can be seen from the comments , In fact, it is just a process of storage allocation and alignment . however , This is not very readable , It is not recommended to visit the members . I guess this is the same as the standard TCB_t There is correspondence , I tested the size of both , It is found that the storage space occupied is actually the same .

I can see you , The two occupy the same storage space . Probably , In the rear OS There will be a certain transformation mapping relationship between the two in the processing of .

If static mode is not supported , Then, when the scheduler is started, it will be created in a dynamic way idle task.

This part of the code above , The effective part is only a little , That's it : If the front idle task Created successfully , Next, disable interrupts . About interrupt disabled interfaces , An analysis has been done before , I don't want to talk about it here .


Next , Update part of OS After the basic information of , Enter the start of the scheduler . About the start of the scheduler , Further analysis will be made later . If idle task If the creation fails , Then it will stop directly at the position of the assertion .

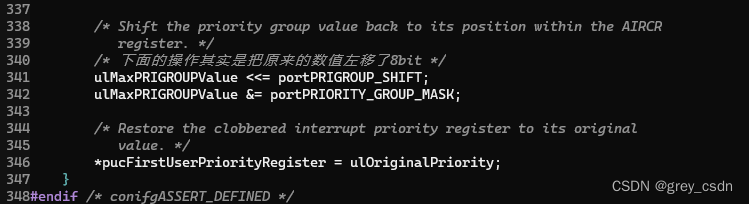
Start the scheduler , First of all, I judged configMAX_SYSCALL_INTERRUPT_PRIORITY The rationality of setting . This cannot be 0, It has been tested before , In the current project, this value is 80. after , Read the contents of the first interrupt priority register and make a save backup . after , Write... To this register 0xFF Then read back , Therefore, judge the interrupt priority support of this kernel implementation . Last , According to the support information of the maximum priority, set the possible error of the previously configured maximum system call interrupt priority 1 Of bit Zero clearing .

here , Print again to confirm .

These functions are described in the notes , In fact, there should be a 3 Result . I added an intermediate quantity to see the real result .

This is the printed result , It can be seen that it is consistent with the previous analysis .

This is actually a verification of the calculated results and the results in the configuration . that , Where did the calculation come from , Where does the configuration information come from ?

This is the basis of the above calculation , From the kernel manual .

This is the basis for the above configuration , From the chip manual .


For the previously calculated group priority, the value is 3, What do you mean by that ? Combined with notes , You can find the document above . Final , This group priority is used to fill in the above SCB_AIRCR Of the group priority bits of the register . And the filling effect is , All priorities are group priorities , There is no sub priority .



Combine this part of the document , It is understandable to set the priority to the lowest . But I don't understand why 3 The third register must be used , Here I try to switch to the first two , It is found that the behavior of the whole system is the same as before when the first one is used . When using the second , An exception occurred in the system .


What to do next , Is for the first interface above vPortSetupTimerInterrupt Call to . See the code here , Find out systick It has come into effect . This makes me feel a little confused , There was actually a timer used for tick To deal with , Also tested . That is, the second code above . This time I did a comparative test , Shielding this Tick Add interface , It is found that the callback function is still executing ,OS It can also operate normally . therefore , The functions realized here , Maybe it's just a counter or timer , however FreeRTOS The function of depends on SysTick To achieve .

here , Realized SysTick Interrupt handling . Here I can't help wondering , If you put this part of processing directly into the previous callback function OS Whether it can run ? Tried to make a change , The timer processing when the scheduler starts is disabled , The relevant processing is put into the callback function of the timer , Test that the previous task runs normally . such ,vPortSetupTimerInterrupt In fact, it can be disabled . A more elegant approach would be to redefine , Override the function of this part . however , current CubeIDE The generated code does not handle this well .

Next , Started the first task 、 Context switching and an error check are performed .
such , The analysis of the framework started by the scheduler is finished . The content in the middle doesn't seem complicated , But there are many pieces of information . and , And the last few OS The relevant interfaces have not been substantially analyzed . Back , We still have to take time to see the specific implementation .
边栏推荐
- Resolve typeerror: ctx injections. tableRoot.$ scopedSlots[ctx.props.column.slot] is not a function
- 1266_FreeRTOS调度器启动代码实现分析
- Web API、DOM
- About the principle and code implementation of Siou (review IOU, giou, Diou, CIO)
- 通过 Ingress 进行灰度发布
- 品牌定位个性六种形态及结论的重大意义
- How exactly does instanceof judge the reference data type!
- Cross-Modal Pattern-Propagation for RGB-T Tracking
- 搜狐员工遭遇工资补助诈骗 黑产与灰产有何区别 又要如何溯源?
- Stack -- one of two common linear structures of linear structure
猜你喜欢

JVM from getting started to abandoning 1: memory model
![Quick sorting of graphic array [with source code]](/img/ef/b1b98db5b16f0c4efc8d3c5247e8b0.jpg)
Quick sorting of graphic array [with source code]

Drawing with qpainter
![JS implementation of Hill sort of graphic insertion sort [with source code]](/img/5a/b89fd5a0ebbc7ca17cc3e1fcb37c8f.jpg)
JS implementation of Hill sort of graphic insertion sort [with source code]

搜狐员工遭遇工资补助诈骗 黑产与灰产有何区别 又要如何溯源?

争议很大的问题

latex 各种箭头/带文字标号的箭头/可变长箭头

617. merge binary tree

VTK-vtkPlane和vtkCutter使用
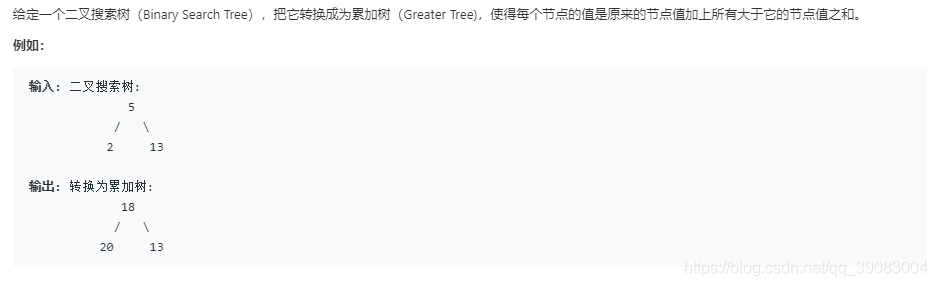
538. convert binary search tree to cumulative tree
随机推荐
Summary and review
网狐游戏服务器房间配置约战定制功能实现
【Matlab WSN通信】A_Star改进LEACH多跳传输协议【含源码 487期】
Won't virtual DOM be available in 2022? Introduction to virtual Dom and complete implementation of diff and patch
Practice: how to reasonably design functions to solve practical problems in software development (I)
563. slope of binary tree
[turn] flying clouds_ Qt development experience
SQL语言-查询语句
Comparison of DOM tags of wechat applet development (native and uniapp)
Redux learning (III) -- using Redux saga, writing middleware functions, and splitting reducer files
saltstack的常用模块
品牌定位个性六种形态及结论的重大意义
UEFI查找PCI设备
Required reading 1: the larger the pattern, the better they know how to speak
Aircraft war from scratch (II) simple development
数学方法论的含义和研究意义
Common troubleshooting tools and analysis artifacts are worth collecting
【概率论与数理统计】猴博士 笔记 p41-44 统计量相关小题、三大分布的判定、性质、总体服从正态分布的统计量小题
Quick sorting of graphic array [with source code]
Reconstruction and preheating of linked list information management system (2) how to write the basic logic using linear discontinuous structure?