当前位置:网站首页>【飞控开发高级教程4】疯壳·开源编队无人机-360 度翻滚
【飞控开发高级教程4】疯壳·开源编队无人机-360 度翻滚
2022-08-03 19:43:00 【efans_Mike】
COCOFLY教程
——疯壳·无人机·系列
360 度翻滚

图1
一、“360 度翻滚”功能简介
360 度翻滚是 COCOFLY 的一大特色功能,支持前、后、左、右四个方向的
360 度翻滚,具体的实现方法如下:
(1)把打开电源的无人机平放在地面上,操控者站在飞机后面一到两米处, 打开遥控电源;
(2)飞机开机后默认是上锁状态,螺旋桨底部的呼吸灯会缓慢地明亮变幻;
(3)打开遥控器,左摇杆拉倒左下角,保持大概 2s,飞机指示灯闪烁一下, 表示解锁成功;
(4)解锁成功后松开摇杆,指示灯呈不断双闪状态,四个螺旋桨会低速转动;
(5)按下左摇杆按键,飞机会起飞到 1 米左右悬停;
(6)往上推油门,增加飞行高度到 1.5 米左右(执行翻滚操作最好高一点);
(7)正常飞行过程中,按一下左摇杆的按键,然后 2 秒内拨动右摇杆选择
翻滚方向即可实现翻滚操作。例如:按下左摇杆的按键,然后 2 秒内把右摇杆往前拨,则可实现飞机向前翻滚。
二、代码相关
代码中实现无人机翻滚主要依托于“filp”这一结构体,其中 flip.angle_x 和flip.angle_y 负责翻滚角度设置。无人机要想实现翻滚只需要对 flip.angle_x 和flip.angle_y 赋值即可,比如向右翻滚一圈,flip.angle_x=-360,flip.angle_y=0, 其中“flip.angle_x”对应无人机的左右方向,“flip.angle_y”对应前后方向。相关的代码如下图所示。


图2
更多完整学习资料和对应开源套件,请登陆官网:“疯壳”
如需定制开发,请通过官网“疯壳”网页底部的“联系我们”进行联系
边栏推荐
- 【leetcode】剑指 Offer II 008. 和大于等于 target 的最短子数组(滑动窗口,双指针)
- net-snmp编译报错:/usr/bin/ld: cannot find crti.o: No such file or directory
- Benchmarking Lane-changing Decision-making for Deep Reinforcement Learning
- 数据驱动的软件智能化开发| ChinaOSC
- Unity获取canvas 下ui 在屏幕中的实际坐标
- Execute the mysql script file in the docker mysql container and solve the garbled characters
- Standard C language learning summary 11
- FreeRTOS Intermediate
- Compose原理-compose中是如何实现事件分法的
- Detailed steps for tensorflow-gpu2.4.1 installation and configuration
猜你喜欢
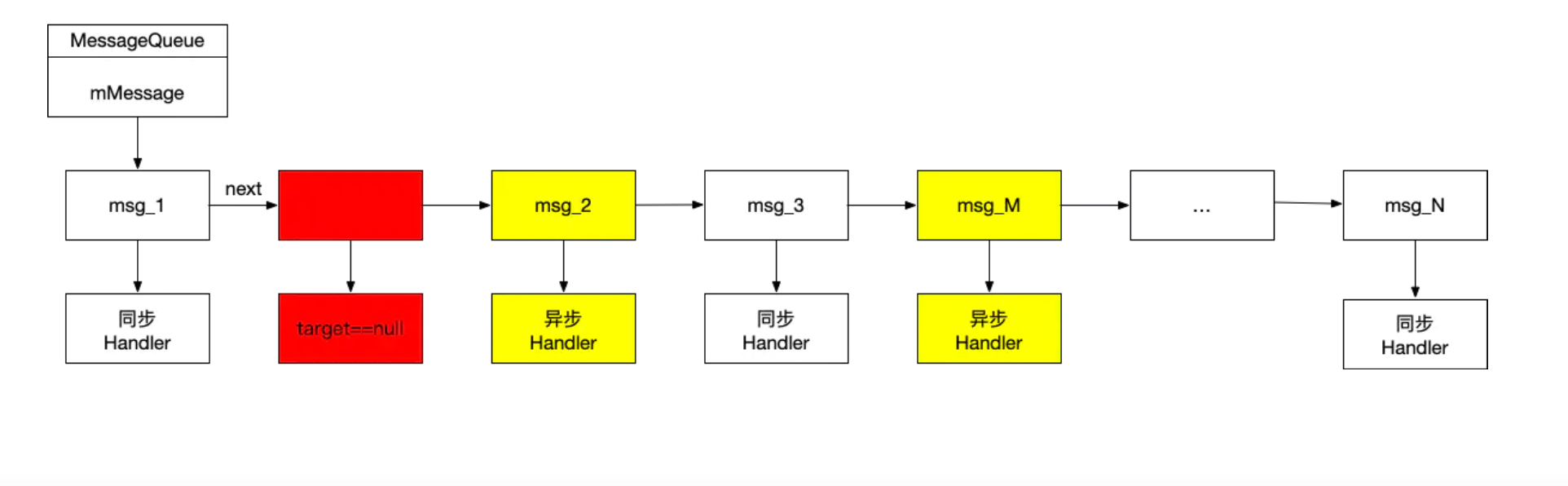
Handler source code analysis
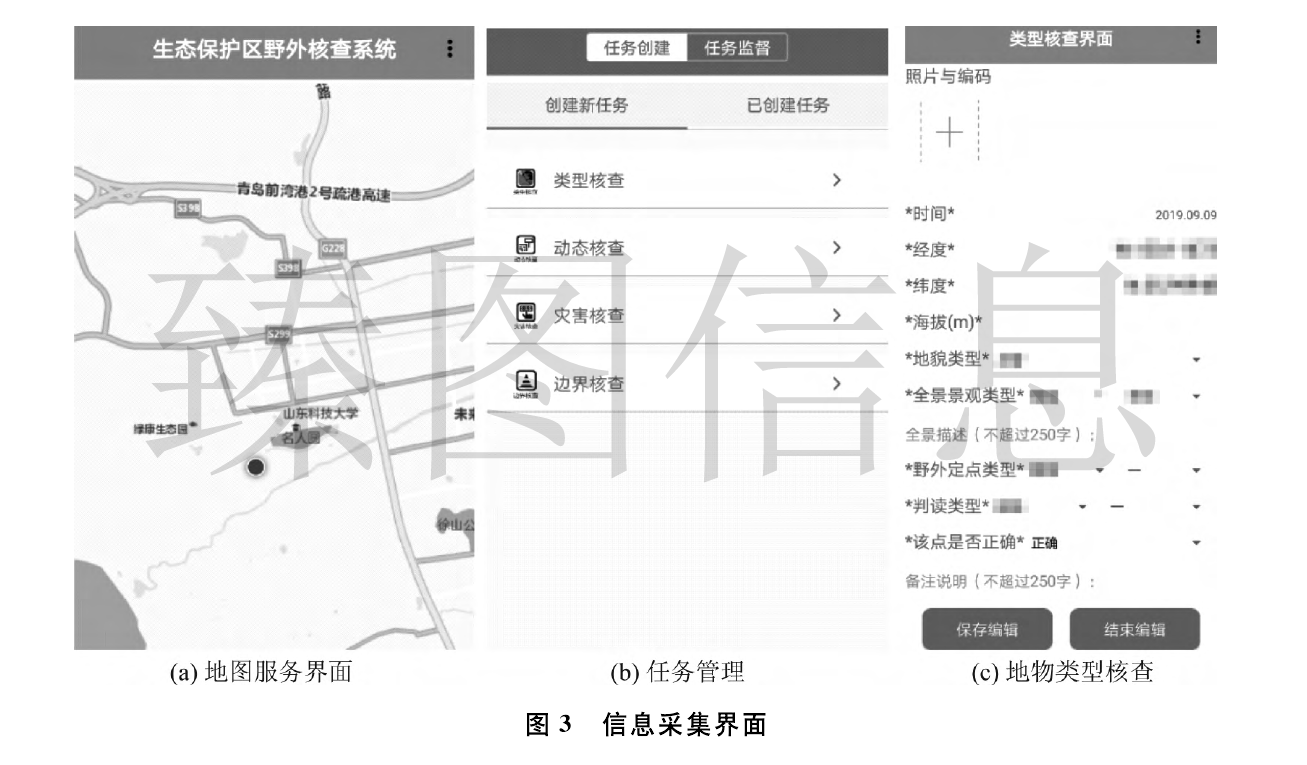
基于移动GIS的环保生态管理系统
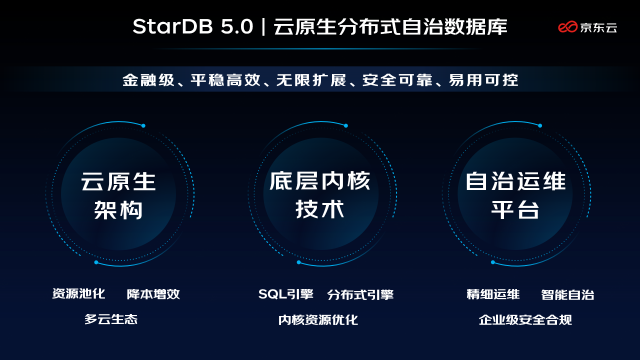
京东云发布新一代分布式数据库StarDB 5.0

小马智行起诉擎天智卡:索赔6000万 彭军称要斗争到底
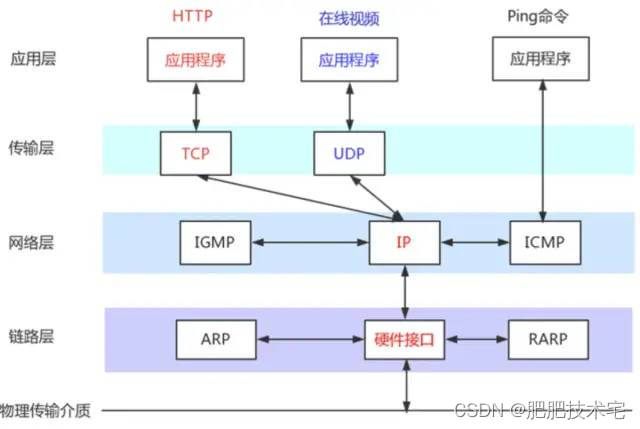
网络协议-TCP、UDP区别及TCP三次握手、四次挥手
flex布局

友宏医疗与Actxa签署Pre-M Diabetes TM 战略合作协议
Compose原理-compose中是如何实现事件分法的

开发即时通讯到底需要什么样的技术,需要多久的时间
Reveal how the five operational management level of hundreds of millions of easily flow system
随机推荐
Handler source code analysis
开发即时通讯到底需要什么样的技术,需要多久的时间
1161 最大层内元素和——Leetcode天天刷【BFS】(2022.7.31)
【统计机器学习】线性回归模型
Interview Blitz: What Are Sticky Packs and Half Packs?How to deal with it?
Node version switching tool NVM and npm source manager nrm
Postgresql源码(65)新快照体系Globalvis工作原理分析
高效目标检测:动态候选较大程度提升检测精度(附论文下载)
FreeRTOS Intermediate
利用net-snmp的库实现snmpget,snmpset
入门3D建模基础教程详细分解
MVC vs MVP
虚拟机vmware设置桥接模式上网
ERROR: You don‘t have the SNMP perl module installed.
小马智行起诉擎天智卡:索赔6000万 彭军称要斗争到底
安装radondb mysql遇到问题
Use ControlTemplate or Style from resource file in WPF .cs and find the control
Internet Download Manager简介及下载安装包,IDM序列号注册问题解决方法
NNLM、RNNLM等语言模型 实现 下一单词预测(next-word prediction)
余弦距离介绍