当前位置:网站首页>PCL knowledge points - voxelized grid method for down sampling of point clouds
PCL knowledge points - voxelized grid method for down sampling of point clouds
2022-07-02 17:25:00 【Jerry_ Sea】
Voxelized mesh method :
“ The voxel mesh method is used to realize down sampling , That is, reduce the number of points , Reduce point cloud data , And maintain the shape characteristics of the point cloud at the same time , In improving registration 、 Surface reconstruction 、 Shape recognition and other algorithms are very practical in speed .
PCL Realized VoxelGrid Class creates a three-dimensional Voxel grid ( You can think of voxel grid as a collection of tiny spatial three-dimensional cubes ), And then in each Voxel ( Three dimensional cube ) Inside , The center of gravity of all points in the voxel is used to approximate the other points in the voxel , In this way, all points in the voxel are finally represented by a center of gravity , For all voxels, the filtered point cloud is obtained . This method is slower than the method of approaching with voxel Center , However, it is more accurate for the representation of the surface corresponding to the sampling point .”
2 Knowledge points supplement
2.1 Point cloud data structure
Point clouds from laser measurements , Contains three-dimensional coordinate information (xyz) And laser reflection intensity information (intensity), Laser reflection intensity and laser emission energy of the instrument 、 wavelength , The surface material of the target 、 Roughness 、 Incident angle correlation . Point clouds from photogrammetry , Including three-dimensional coordinates (xyz) And color information (rgb)
PCL The basic data type of is PointCloud, One PointCloud It's a C++ Template class of , It contains the following fields :
width(int): Specifies the width of the point cloud dataset
For unorganized data sets ,width Represents the total number of all points
For data sets in an organized format ,width Represents the total number of points in a row
height(int): Set the height of the point cloud dataset
For unorganized data sets , The value is 1
For data sets in an organized format , It means the total number of rows
points(std::vector): Contains all the PointT Data list of points of type
PLC The derivation types of are as follows :
PointXYZ - float x, y, z
PointXYZI - float x, y, z, intensity
PointXYZRGB - float x, y, z, rgb
PointXYZRGBA - float x, y, z, uint32_t rgba
Normal - float normal[3], curvature Normal direction , The measured value of the corresponding curvature
PointNormal - float x, y, z, normal[3], curvature Sampling point , Normals and curvature
Histogram - float histogram[N] For general purpose storage n Dimensional histogram
2.2 Reading and writing point cloud data
#include <iostream>
#include <pcl/io/pcd_io.h> //PCD data , Read and write class related header files
#include <pcl/point_types.h> //PCL Point type header files supported in , Include some PointT Structure declaration of type , Such as :pcl::PointXYZ This type of
int read();
void write();
int main(int argc,char** argv)
{
int ret_r = read();
write();
return 0;
}
int read()
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);// Create a PointCloud<PointXYZ> Ptr Share pointers and instantiate them .
//pcl::PointCloud<pcl::PointXYZ> By analogy vector<int>
if(pcl::io::loadPCDFile<pcl::PointXYZ>("test_pcd.pcd",*cloud)==-1)// Open the point cloud file
{
PCL_ERROR("Couldn't read file test_pcd.pcd\n");
return -1;
}
// Very important !!!!
//sensor_msgs::PointCloud2 cloud_blob; //sensor_msgs::PointCloud2 It is a kind of point cloud structure (ROS Point cloud topic ), You can talk to pcl::PointCloud<T> This transformation
//pcl::io::loadPCDFile("test_pcd.pcd", cloud_blob);
//pcl::fromROSMsg(cloud_blob, *cloud); // take sensor_msgs::PointCloud2 Convert to pcl::PointCloud<T>
std::cout<<"Loaded "<<cloud->width*cloud->height<< " data points from test_pcd.pcd with the following fields: "<<std::endl;
for(size_t i=0;i<cloud->points.size();++i)
std::cout<<" "<<cloud->points[i].x<<" "<<cloud->points[i].y<<" "<<cloud->points[i].z<<std::endl;
return 0;
}
void write()
{
pcl::PointCloud<pcl::PointXYZ> cloud;
// Create a point cloud
cloud.width=5;
cloud.height=1;
cloud.is_dense=false;
cloud.points.resize(cloud.width*cloud.height);
for(size_t i=0;i<cloud.points.size();++i)
{
cloud.points[i].x=1024*rand()/(RAND_MAX+1.0f);
cloud.points[i].y=1024*rand()/(RAND_MAX+1.0f);
cloud.points[i].z=1024*rand()/(RAND_MAX+1.0f);
}
std::cout<<"rand: "<<rand()<<"RAND_MAX: "<<RAND_MAX;
// Save point cloud
pcl::io::savePCDFileASCII("test_write_pcd.pcd",cloud);
std::cerr<<"Saved "<<cloud.points.size()<<" data points to test_pcd.pcd."<<std::endl;
for(size_t i=0;i<cloud.points.size();++i)
std::cerr<<" "<<cloud.points[i].x<<" "<<cloud.points[i].y<<" "<<cloud.points[i].z<<std::endl;
}
CMakeLists.txt:
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(pcd_read)
find_package(PCL 1.2 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable(pcd_read pcd_rw.cpp)
target_link_libraries(pcd_read ${PCL_LIBRARIES})
Output content :
[email protected]:~/wuhd/code/pcl/3/1/build$ ./pcd_read
Loaded 5 data points from test_pcd.pcd with the following fields:
1.28125 577.094 197.938
828.125 599.031 491.375
358.688 917.438 842.562
764.5 178.281 879.531
727.531 525.844 311.281
rand: 1967513926RAND_MAX: 2147483647Saved 5 data points to test_pcd.pcd.
0.352222 -0.151883 -0.106395
-0.397406 -0.473106 0.292602
-0.731898 0.667105 0.441304
-0.734766 0.854581 -0.0361733
-0.4607 -0.277468 -0.916762
Use cat Commands can be viewed pcd file (PCD The documents are as follows )
[email protected]:~/wuhd/code/pcl/3/1/build$ cat test_write_pcd.pcd
# .PCD v0.7 - Point Cloud Data file format
VERSION 0.7
FIELDS x y z
SIZE 4 4 4
TYPE F F F
COUNT 1 1 1
WIDTH 5
HEIGHT 1
VIEWPOINT 0 0 0 1 0 0 0
POINTS 5
DATA ascii
0.35222197 -0.15188313 -0.10639524
-0.3974061 -0.47310591 0.29260206
-0.73189831 0.66710472 0.44130373
-0.73476553 0.85458088 -0.036173344
-0.46070004 -0.2774682 -0.91676188
VERSION 0.5 Appoint PCS Document version
FIELDS x y z Specify the name of each dimension and field of a point , for example
FIELDS x y z # XYZ data
FIELDS x y z rgb # XYZ + colors
FIELDS x y z normal_x normal_y normal_z # XYZ + surface normals
SIZE 4 4 4 Specify the number and size of bytes for each dimension
TYPE F F F Specify the type of each dimension ,I Express int,U Express uint,F It means floating point
COUNT 1 1 1 Specify the number of elements contained in each dimension , without COUNT, The default is 1
WIDTH 5 The width of the point cloud dataset
HEIGHT 1 The height of the point cloud dataset
VIEWPOINT 0 0 0 1 0 0 0 Specify the viewpoint and angle obtained by the point cloud , Use... When converting between different coordinate systems ( from 3 A translation +4 Quaternions form )
POINTS 5 Total points ( It seems superfluous )
DATA ascii The data type for storing point cloud data ,ASCII and binary
Add :PCL in PCD The official release of the file format is 0.7 edition , Before that 0.5,0.6 edition .
Sometimes to save space , Improve reading and writing efficiency , It will also binary To be serialized , the save Operation changed to
pcl::io::savePCDFileBinary("test_pcd_binary.pcd", cloud);
// or
pcl::io::savePCDFile("test_pcd_binary.pcd", cloud, true);
At this time, the output content is as follows :
[email protected]:~/wuhd/code/pcl/3/1/build$ cat test_write_pcd_bin.pcd
# .PCD v0.7 - Point Cloud Data file format
VERSION 0.7
FIELDS x y z
SIZE 4 4 4
TYPE F F F
COUNT 1 1 1
WIDTH 5
HEIGHT 1
VIEWPOINT 0 0 0 1 0 0 0
POINTS 5
DATA binary
pV�>@����ٽ�x˾�:���ϕ>�];�`�*?���>�<���Z?�*�����P����j�
Note that the last line of output is saved in binary , Therefore, you cannot directly see the value .
2.3 ROS Real time acquisition and visualization of point cloud data
cpp
#include <ros/ros.h>
#include <pcl_ros/point_cloud.h>
#include <pcl/io/pcd_io.h>
#include <sstream>
#include <string.h>
typedef pcl::PointXYZRGB PointT;
typedef pcl::PointCloud<PointT> PointCloudT;
PointCloudT::Ptr cloud(new PointCloudT);
//std::string world_frame_id;
std::string frame_id;
std::string path;
void cloud_cb (const PointCloudT::ConstPtr& callback_cloud)
{
*cloud = *callback_cloud;
frame_id = cloud->header.frame_id;
std::stringstream ss;
std::string s1;
ss<<ros::Time::now();
s1=ss.str();
// cloud saving:
std::string file_name=path+"cloud_"+frame_id.substr(0, frame_id.length())+"_"+s1+".pcd";
// Form 1 :substr(pos,n) notes :1.pos Indicates the subscript of the intercepted character .2.n Represents intercepting from pos After that n Characters .
// Form 2 :substr(n) notes :1. if n>=0, Indicates that the intercept subscript is n All characters after .2. if n<0, Indicates the penultimate of the intercepted string n All characters after .
std::cout<<file_name<<std::endl;
pcl::io::savePCDFileBinary(file_name,*cloud);
}
int
main (int argc, char** argv)
{
ros::init(argc, argv, "save_cloud");
ros::NodeHandle nh("~");
//Read some parameters from launch file:
std::string pointcloud_topic = "/camera/depth_registered/points";
path = "./pointtest/";
// Subscribers:
ros::Subscriber sub = nh.subscribe(pointcloud_topic, 1, cloud_cb);
std::cout<<"receive messages successfully!"<<std::endl;
ros::spin();
return 0;
}
CMakeLists.txt
cmake_minimum_required(VERSION 2.8.3)
project(my_savecloud_tutorials)
find_package(catkin REQUIRED COMPONENTS
pcl_conversions
pcl_ros
roscpp
sensor_msgs
std_msgs
)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES my_savecloud_tutorials
# CATKIN_DEPENDS pcl_conversions pcl_ros roscpp sensor_msgs std_msgs
# DEPENDS system_lib
)
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
add_executable(save_cloud src/save_cloud.cpp)
target_link_libraries(save_cloud ${catkin_LIBRARIES})
边栏推荐
- 畅玩集团冲刺港股:年营收2.89亿 刘辉有53.46%投票权
- Sword finger offer 25 Merge two sorted linked lists
- Win10系统使用pip安装juypter notebook过程记录(安装在系统盘以外的盘)
- [leetcode] 14. Préfixe public le plus long
- 几行代码搞定RPC服务注册和发现
- Goodbye, shucang. Alibaba's data Lake construction strategy is really awesome!
- AP and F107 data sources and processing
- The beginning of life
- Eth data set download and related problems
- 简单介绍BASE64Encoder的使用
猜你喜欢

Connect Porsche and 3PL EDI cases
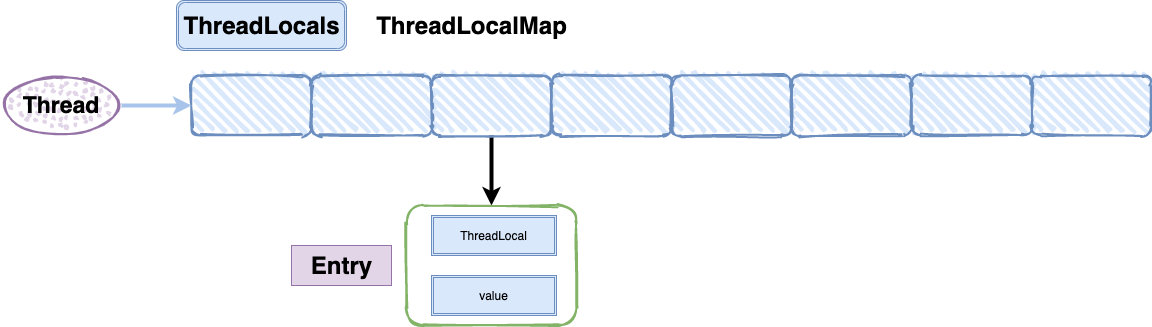
ThreadLocal
![[fluent] dart data type map type (create map set | initialize map set | traverse map set)](/img/02/75d21470ea0ae4cd3d17696a93d1ca.jpg)
[fluent] dart data type map type (create map set | initialize map set | traverse map set)

Changwan group rushed to Hong Kong stocks: the annual revenue was 289million, and Liu Hui had 53.46% voting rights

Sword finger offer 26 Substructure of tree

The computer comes with software to make the background color of the picture transparent (matting white background)
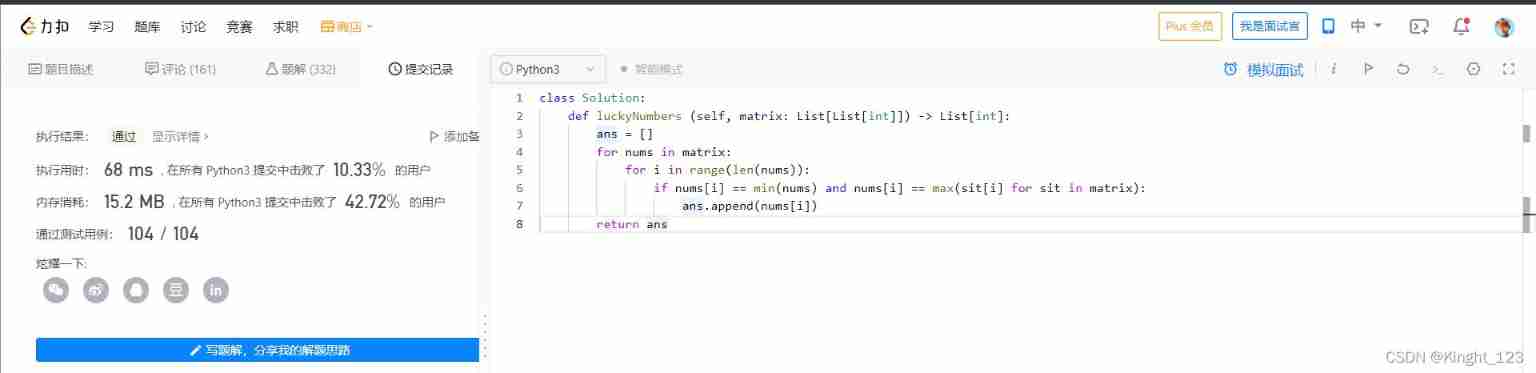
LeetCode:1380. Lucky number in matrix -- simple
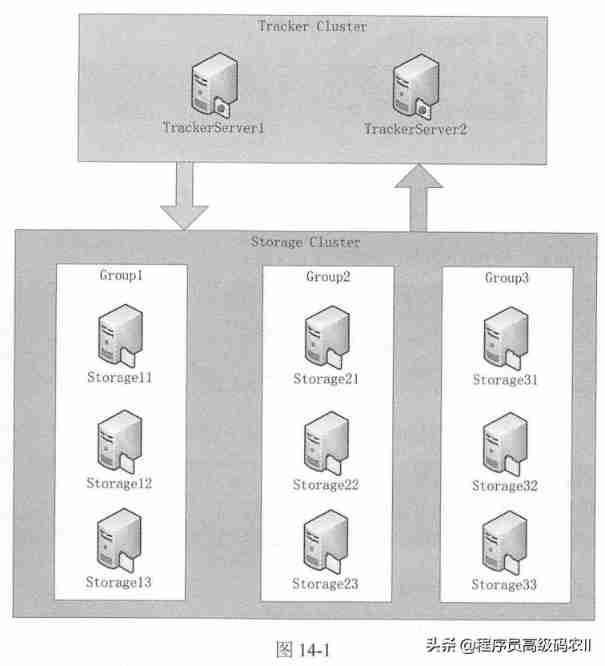
Microservice architecture practice: Construction of highly available distributed file system fastdfs architecture
剑指 Offer 26. 树的子结构

si446使用记录(二):使用WDS3生成头文件
随机推荐
Win10系统使用pip安装juypter notebook过程记录(安装在系统盘以外的盘)
求简单微分方程
JS20 array flattening
class和getClass()的区别
SSB threshold_ SSB modulation "suggestions collection"
Green bamboo biological sprint Hong Kong stocks: loss of more than 500million during the year, tiger medicine and Beijing Yizhuang are shareholders
2020 "Lenovo Cup" National College programming online Invitational Competition and the third Shanghai University of technology programming competition (a sign in, B sign in, C sign in, D thinking +mst
对接保时捷及3PL EDI案例
SAP Commerce Cloud Storefront 框架选型:Accelerator 还是 Spartacus?
Idea2021.1 installation tutorial
Use of openpose
OpenHarmony如何启动FA(本地和远程)
简单线性规划问题
体验居家办公完成项目有感 | 社区征文
13、Darknet YOLO3
AP and F107 data sources and processing
剑指 Offer 27. 二叉树的镜像
How to quickly distinguish controlled components from uncontrolled components?
[fluent] dart data type map type (create map set | initialize map set | traverse map set)
2022 interview questions