当前位置:网站首页>【OpenCV 例程 300篇】240. OpenCV 中的 Shi-Tomas 角点检测
【OpenCV 例程 300篇】240. OpenCV 中的 Shi-Tomas 角点检测
2022-07-26 16:43:00 【YouCans】
『youcans 的 OpenCV 例程300篇 - 总目录』
【youcans 的 OpenCV 例程 300篇】240. OpenCV 中的 Shi-Tomas 角点检测
角是直线方向的快速变化。角点通常被定义为两条边的交点,或者说角点的邻域应该具有两个不同区域的不同方向的边界。
角是高度有效的特征。角点检测(Corner Detection)广泛应用于运动检测、图像匹配、视频跟踪、三维重建和目标识别。
Shi-Tomas 算法是对 Harris角点检测算法的改进,一般会比Harris算法得到更好的角点。
6.1 哈里斯-斯蒂芬斯角检测器(Harris)
Harris角点检测算法的原理是,通过检测窗口在图像上移动,计算移动前后窗口中像素的灰度变化。角点是两条边的交点,其特征是检测窗口沿任意方向移动都会导致灰度的显著变化。
对于点 ( x , y ) (x,y) (x,y),令 w ( x , y ) w(x,y) w(x,y) 为矩形检测窗口或高斯检测窗口, I ( x , y ) I(x,y) I(x,y) 是检测窗口在点 ( x , y ) (x,y) (x,y) 的灰度值, I ( x + u , y + v ) I(x+u,y+v) I(x+u,y+v) 是检测窗口滑动 ( u , v ) (u,v) (u,v) 距离之后的灰度值。
计算窗口 w ( x , y ) w(x,y) w(x,y) 滑动 ( u , v ) (u,v) (u,v) 距离之后的灰度变化:
E ( u , v ) = ∑ x , y w ( x , y ) [ I ( x + u , y + v ) − I ( x , y ) ] 2 E(u,v) = \sum _{x,y} w(x,y) [I(x+u, y+v) - I(x,y)]^2 E(u,v)=x,y∑w(x,y)[I(x+u,y+v)−I(x,y)]2
对于很小的位移 ( u , v ) (u,v) (u,v),使用一阶泰勒展开进行简化:
E ( u , v ) = ∑ x , y w ( x , y ) [ I ( x , y ) + u I x + v I y + O ( u 2 , v 2 ) − I ( x , y ) ] 2 ≈ ∑ x , y w ( x , y ) [ u 2 I x 2 + 2 u v I x I y + v 2 I y 2 ] ≈ [ u , v ] ∑ x , y w ( x , y ) [ I x I x I x I y I x I y I y I y ] [ u v ] \begin{aligned}E(u,v) = &\sum_{x,y} w(x,y) [I(x,y) + uI_x + vI_y +O(u^2,v^2)- I(x,y)]^2 \\\approx & \sum_{x,y} w(x,y) [u^2 I_x^2 + 2uv I_x I_y + v^2 I_y^2] \\\approx & [u,v] \sum_{x,y}w(x,y)\begin{bmatrix}I_x I_x & I_x I_y \\I_x I_y & I_y I_y\end{bmatrix}\begin{bmatrix}u\\v\end{bmatrix}\end{aligned} E(u,v)=≈≈x,y∑w(x,y)[I(x,y)+uIx+vIy+O(u2,v2)−I(x,y)]2x,y∑w(x,y)[u2Ix2+2uvIxIy+v2Iy2][u,v]x,y∑w(x,y)[IxIxIxIyIxIyIyIy][uv]
I x , I y I_x,I_y Ix,Iy 分别是在 x, y 方向的导数,可以由 Sobel 梯度算子求出。
记 M 为梯度的协方差矩阵:
M = ∑ x , y w ( x , y ) [ I x I x I x I y I x I y I y I y ] M =\sum_{x,y} w(x,y)\begin{bmatrix}I_x I_x & I_x I_y \\I_x I_y & I_y I_y\end{bmatrix} M=x,y∑w(x,y)[IxIxIxIyIxIyIyIy]
在几何模型中通过判断两个特征值的大小,来判定像素的属性。矩阵 M 是 I x , I y I_x,I_y Ix,Iy 的二次函数,可以表示为椭圆形状,椭圆的长短半轴由矩阵 M 的特征值 λ 1 , λ 2 \lambda _1,\lambda _2 λ1,λ2 决定,方向由特征向量决定。
定义角点响应函数 R:
R = d e t ( M ) − k [ t r a c e ( M ) ] 2 d e t ( M ) = λ 1 ∗ λ 2 t r a c e ( M ) = λ 1 + λ 2 \begin{aligned}R =& det(M) - k [trace(M)]^2 \\&det(M) = \lambda _1 * \lambda _2 \\&trace(M) = \lambda _1 + \lambda _2\end{aligned} R=det(M)−k[trace(M)]2det(M)=λ1∗λ2trace(M)=λ1+λ2
k 是调节参数(通常取 0.04~0.06)。
角点响应函数 R 只与矩阵 M 的特征值 λ 1 , λ 2 \lambda _1,\lambda _2 λ1,λ2 有关,可以用来判断区域是拐角、边缘还是平坦:
- λ 1 , λ 2 \lambda _1,\lambda _2 λ1,λ2 较小时, ∣ R ∣ |R| ∣R∣ 较小,即各个方向上灰度基本不变,表明检测器处于平坦区域;
- λ 1 > > λ 2 \lambda _1 >> \lambda _2 λ1>>λ2 或 $ \lambda _2 >> \lambda _1$ 时, R < 0 R <0 R<0 ,即灰度在某个方向变化,但在其正交方向不变化,表明检测器处于边缘区域;
- λ 1 , λ 2 \lambda _1,\lambda _2 λ1,λ2 较大且 λ 1 ∼ λ 2 \lambda _1 \sim \lambda _2 λ1∼λ2时, ∣ R ∣ |R| ∣R∣ 很大,即灰度在所有方向都发生重大变化,表明检测器包含角点(或孤立点。
6.3 OpenCV 中的 Shi-Tomas 角检测器
Shi-Tomas 算法是对 Harris角点检测算法的改进,一般会比Harris算法得到更好的角点。
Harris 算法中的角点响应函数为:
R = λ 1 λ 2 − k ( λ 1 + λ 2 ) 2 R =\lambda _1 \lambda _2 - k (\lambda _1 + \lambda _2)^2 R=λ1λ2−k(λ1+λ2)2
Shi-Tomas 算法将角点响应函数修改为:
R = m i n ( λ 1 , λ 2 ) R = min (\lambda _1 , \lambda _2 ) R=min(λ1,λ2)
只有当 M 矩阵的特征值 $ \lambda _1,\lambda _2$ 都大于最小值 λ m i n \lambda {min} λmin 时,才将其视为拐角。
OpenCV 中提供了 Shi-Tomas 角点检测函数 cv.goodFeaturesToTrack() 。
函数说明:
cv.goodFeaturesToTrack(image, maxCorners, qualityLevel, minDistance[, corners=None, mask=Mat(), blockSize=3, useHarrisDetector=false, k=0.04]) → corners
函数 cv.goodFeaturesToTrack 通过 Shi-Tomasi 方法找出图像中最突出的 N 个角点。
参数说明:
- src:输入图像,单通道的 8 位图像或 32 位浮点数图像
- corners:输出向量,检测到的角点
- maxCorners:获取的角点数量的上限阈值
- qualityLevel:可接受的角点质量最低阈值,取值范围 0~1
- minDistance:可接受的角点之间最小的欧式距离
- mask:掩模区域,仅在掩模区域检测角点
- blockSize:邻域尺寸,默认值为 3
- k:Harris 检测器调节参数,默认值 0.04
- useHarrisDetector :默认值 False,使用 cornerMinEigenVal 的参数,True 表示使用 Harris 检测器
注意事项:
- 函数使用 cornerMinEigenVal 或 cornerHarris 计算出每个像素的角点响应结果。
- 以 qualityLevel 与最大角点值相乘作为最小特征值(cornerMinEigenVal)或响应函数值(cornerHarris),小于该值的角点都被拒绝。例如,最大响应值为 1500,系数为 0.1,则响应值小于 150 的角点都被放弃。
- 小于 maxDistance 距离的角点被拒绝,以避免得到相邻特征点。
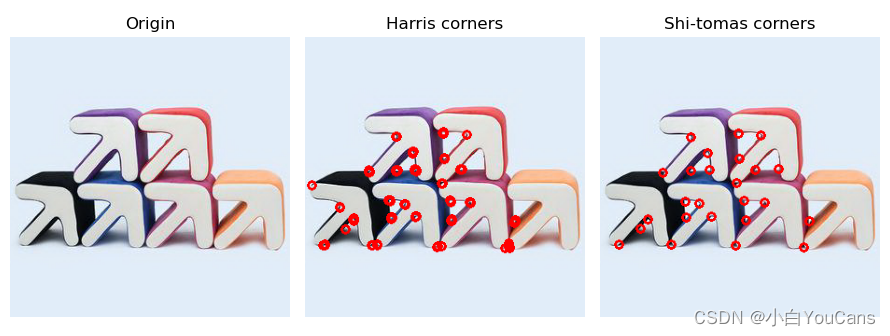
例程 14.21:特征检测之 Shi-tomas 角检测器
# 14.21 特征检测之 Shi-tomas 角检测器
img = cv2.imread("../images/sign04.png", flags=1) # (300, 300, 3)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# Harris 检测角点
dst = cv2.cornerHarris(gray, 2, 3, k=0.04)
# Harris[dst > 0.01*dst.max()] = [0, 0, 255] # 筛选角点,红色标记
corners = np.column_stack(np.where(dst>0.1*dst.max())) # 筛选并返回角点坐标 (y,x)
corners = corners.astype(np.int) # 检测到的角点的点集 (y,x), (92, 2)
imgHarris = np.copy(img)
for point in corners: # 注意坐标次序
cv2.circle(imgHarris, (point[1], point, 4, (0,0,255), 2) # # 在点 (x,y) 处画圆
# Shi-tomas 检测角点
corners = cv2.goodFeaturesToTrack(gray, 30, 0.3, 5) # (30, 1, 2)
corners = np.squeeze(corners).astype(np.int) # (30, 1, 2)->(30,2) 角点坐标 (x,y)
imgShiTomas = np.copy(img)
for point in corners:
cv2.circle(imgShiTomas, point, 4, (0,0,255), 2) # # 在点 (x,y) 处画圆
plt.figure(figsize=(9, 6))
plt.subplot(131), plt.axis('off'), plt.title("Origin")
plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
plt.subplot(132), plt.axis('off'), plt.title("Harris corners")
plt.imshow(cv2.cvtColor(imgHarris, cv2.COLOR_BGR2RGB))
plt.subplot(133), plt.axis('off'), plt.title("Shi-tomas corners")
plt.imshow(cv2.cvtColor(imgShiTomas, cv2.COLOR_BGR2RGB))
plt.tight_layout()
plt.show()
【本节完】
版权声明:
[email protected] 原创作品,转载必须标注原文链接:(https://blog.csdn.net/youcans/article/details/125828053)
Copyright 2022 youcans, XUPT
Crated:2022-7-15238. OpenCV 中的 Harris 角点检测
239. Harris 角点检测之精确定位(cornerSubPix)
240. OpenCV 中的 Shi-Tomas 角点检测
边栏推荐
- Interface comparator
- Three misunderstandings of CRM implementation: lack of strategy, lack of identity, and technology first
- SQL注入(思维导图)
- Pyqt5 rapid development and practice 3.2 introduction to layout management and 3.3 practical application of QT Designer
- After Oracle creates a table partition, the partition is not given during the query, but the value specified for the partition field will be automatically queried according to the partition?
- How emqx 5.0 under the new architecture of mria+rlog realizes 100million mqtt connections
- 办公软件常用快捷键大全
- [Luogu p8063] shortest paths (graph theory)
- Chuan Hejing technology's mainland factory was invaded by a virus, and the whole line was shut down!
- Using MySQL master-slave replication delay to save erroneously deleted data
猜你喜欢
浅谈云原生边缘计算框架演进

Pyqt5 rapid development and practice 3.2 introduction to layout management and 3.3 practical application of QT Designer

【开发教程7】疯壳·开源蓝牙心率防水运动手环-电容触摸

Review the past and know the new MySQL isolation level

【开发教程8】疯壳·开源蓝牙心率防水运动手环-三轴计步伐

Win11系统如何一键进行重装?

How to ensure cache and database consistency
Advantages of time series database and traditional database
How does win11 reinstall the system?

Redis persistence - detailed analysis of RDB source code | nanny level analysis! The most complete network
随机推荐
[basic course of flight control development 2] crazy shell · open source formation UAV - timer (LED flight information light and indicator light flash)
2022软件测试技能 Postman+newman+jenkins 持续集成 实战教程
Eureka Registry - from entry to application
[visdrone data set] yolov7 training visdrone data set and results
[C language classic topic exercise 2]
[development tutorial 8] crazy shell · open source Bluetooth heart rate waterproof sports Bracelet - triaxial meter pace
大家下午好,请教一个问题:如何从保存点启动一个之前以SQL提交的作业?问题描述:用SQL在cl
Win11 auto delete file setting method
PXE高效批量网络装机
Realizing DDD based on ABP -- related concepts of DDD
About the difference between BigDecimal conversion string toengineeringstring, toplainstring and toString
快速学会配置yum的本地源和网络源,并学会yum的使用
The user experience center of Analysys Qianfan bank was established to help upgrade the user experience of the banking industry
【飞控开发基础教程1】疯壳·开源编队无人机-GPIO(LED 航情灯、信号灯控制)
37. [categories of overloaded operators]
2022-2023 topic recommendation of information management graduation project
Sharing of 40 completed projects of high-quality information management specialty [source code + Thesis] (VI)
Tcpdump命令详解
How to use C language nested linked list to realize student achievement management system
There are six ways to help you deal with the simpledateformat class, which is not a thread safety problem