当前位置:网站首页>STM32 project design: temperature, humidity and air quality alarm, sharing source code and PCB
STM32 project design: temperature, humidity and air quality alarm, sharing source code and PCB
2022-06-26 08:22:00 【Turn into dust】
List of articles
2021 year 10 month 27-2022 year 1 month 1 Japan Can undertake single chip microcomputer design , Intentionally added Q2809786963
Baidu online data link :https://pan.baidu.com/s/1J6AuQpoDJbjMko3kSD4aZw
Extraction code :81f5
Take a like ~
One 、 subject
1、 use DHT11 The temperature and humidity sensor obtains the temperature and humidity information , According to the OLED On the screen
2、 use MQ-135 The air quality sensor obtains air quality information , According to the OLED On the screen
3、 Design an alarm system , The upper limit of temperature, humidity and air quality can be set , Beyond this value, the buzzer will give an audible alarm
Two 、 Prepare the material
( One )、 Master chip stm32f103c8t6 Core board 
( Two )DHT11 Temperature and humidity sensor 
( 3、 ... and )mq135 Air quality sensors 
( Four )4 The needle IIC OLED
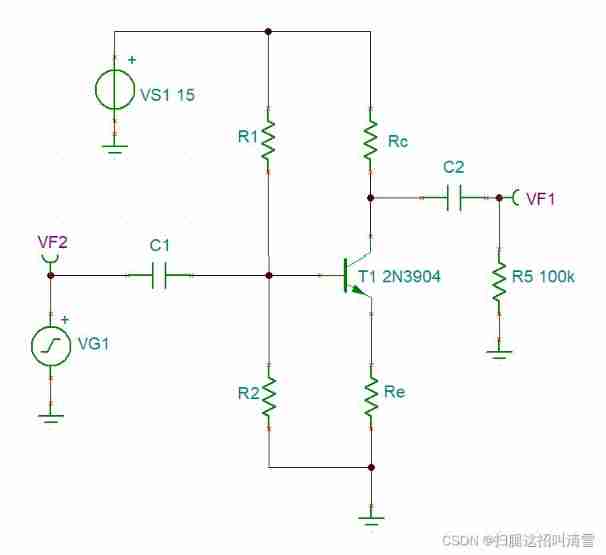
3、 ... and 、 Schematic and PCB Design
( One ) Schematic design 
( Two )PCB Design 
Four 、 Programming
( One )DHT11 drive
DHT11.c
#include "DHT11.h"
#include "delay.h"
//???DHT11
//??:??????(????)
u8 DHT11_Init()
{
GPIO_InitTypeDef GPIO_InitStruce;
RCC_APB2PeriphClockCmd(DHT11_DQ_RCC,ENABLE); //????PA0
GPIO_InitStruce.GPIO_Pin = DHT11_DQ_PIN;
GPIO_InitStruce.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruce.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DHT11_DQ_PORT,&GPIO_InitStruce);
DHT11_Rst();
return DHT11_Check();
}
//??DHT11
void DHT11_Rst(void)
{
DHT11_IO_OUT(); //SET OUTPUT
DHT11_DQ_OUT=0; //??DQ
delay_ms(20); //????18ms
DHT11_DQ_OUT=1; //DQ=1
delay_us(30); //????20~40us
}
//??DHT11???
//??1:????DHT11???
//??0:??
u8 DHT11_Check(void)
{
u8 retry=0;
DHT11_IO_IN();//SET INPUT
while (DHT11_DQ_IN&&retry<100)//DHT11???40~80us
{
retry++;
delay_us(1);
};
if(retry>=100)return 1;
else retry=0;
while (!DHT11_DQ_IN&&retry<100)//DHT11????????40~80us
{
retry++;
delay_us(1);
};
if(retry>=100)return 1;
return 0;
}
//?DHT11?????
//???:1/0
u8 DHT11_Read_Bit(void)
{
u8 retry=0;
while(DHT11_DQ_IN&&retry<100)//???????
{
retry++;
delay_us(1);
}
retry=0;
while(!DHT11_DQ_IN&&retry<100)//??????
{
retry++;
delay_us(1);
}
delay_us(40);//??40us
if(DHT11_DQ_IN)
return 1;
else
return 0;
}
//?DHT11??????
//???:?????
u8 DHT11_Read_Byte(void)
{
u8 i,dat;
dat=0;
for (i=0;i<8;i++)
{
dat<<=1;
dat|=DHT11_Read_Bit();
}
return dat;
}
//?DHT11??????
//temp:???(??:0~50? humi:???(??:20%~90%)
//???:0,??;1,????
u8 DHT11_Read_Data(u8 *temp,u8 *humi)
{
u8 buf[5];
u8 i;
DHT11_Rst();
if(DHT11_Check()==0)
{
for(i=0;i<5;i++)//??40???
{
buf[i]=DHT11_Read_Byte();
}
if((buf[0]+buf[1]+buf[2]+buf[3])==buf[4])
{
*humi=buf[0];
*temp=buf[2];
}
}else return 1;
return 0;
}
DHT11.h
#ifndef __DHT11_H
#define __DHT11_H
#include "sys.h"
#define DHT11_IO_IN() {
GPIOA->CRL&=0XFF0FFFFF;GPIOA->CRL|=8<<20;}
#define DHT11_IO_OUT() {
GPIOA->CRL&=0XFF0FFFFF;GPIOA->CRL|=3<<20;}
#define DHT11_DQ_OUT PAout(5)
#define DHT11_DQ_IN PAin(5)
#define DHT11_DQ_RCC RCC_APB2Periph_GPIOA
#define DHT11_DQ_PIN GPIO_Pin_5
#define DHT11_DQ_PORT GPIOA
u8 DHT11_Init(void);
u8 DHT11_Read_Data(u8 *temp,u8 *humi);
u8 DHT11_Read_Byte(void);
u8 DHT11_Read_Bit(void);
void DHT11_Rst(void);
u8 DHT11_Check(void);
#endif
( Two )MQ-135 drive , Because it uses ADC, Go straight up ADC Code
#include "adc.h"
#include "delay.h"
// initialization ADC
// Here we just take the regular channel as an example
// We will open the channel by default 0~3
void Adc_Init(void)
{
ADC_InitTypeDef ADC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA |RCC_APB2Periph_ADC1 , ENABLE ); // Can make ADC1 Channel clock
RCC_ADCCLKConfig(RCC_PCLK2_Div6); // Set up ADC Division factor 6 72M/6=12,ADC The maximum time cannot exceed 14M
//PA1 As an analog channel input pin
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; // Analog input pins
GPIO_Init(GPIOA, &GPIO_InitStructure);
ADC_DeInit(ADC1); // Reset ADC1
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //ADC Working mode :ADC1 and ADC2 Working in independent mode
ADC_InitStructure.ADC_ScanConvMode = DISABLE; // Analog to digital conversion works in single channel mode
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; // A / D conversion works in single conversion mode
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; // The transformation is initiated by software rather than external triggers
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //ADC Data right alignment
ADC_InitStructure.ADC_NbrOfChannel = 1; // In order to change the rules ADC The number of channels
ADC_Init(ADC1, &ADC_InitStructure); // according to ADC_InitStruct The parameter specified in ADCx The register of
ADC_Cmd(ADC1, ENABLE); // Enable to designate ADC1
ADC_ResetCalibration(ADC1); // Enable reset calibration
while(ADC_GetResetCalibrationStatus(ADC1)); // Wait for the reset calibration to finish
ADC_StartCalibration(ADC1); // Turn on AD calibration
while(ADC_GetCalibrationStatus(ADC1)); // Wait for the calibration to finish
// ADC_SoftwareStartConvCmd(ADC1, ENABLE); // Enable to designate ADC1 Software conversion start function
}
// get ADC value
//ch: Value channel 0~3
u16 Get_Adc(u8 ch)
{
// Set the specified ADC The rule group channel for , A sequence , Sampling time
ADC_RegularChannelConfig(ADC1, ch, 1, ADC_SampleTime_239Cycles5 ); //ADC1,ADC passageway , The sampling time is 239.5 cycle
ADC_SoftwareStartConvCmd(ADC1, ENABLE); // Enable to designate ADC1 Software conversion start function
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC ));// Wait for the conversion to finish
return ADC_GetConversionValue(ADC1); // Go back to the last time ADC1 Conversion result of rule group
}
u16 Get_Adc_Average(u8 ch,u8 times)
{
u32 temp_val=0;
u8 t;
for(t=0;t<times;t++)
{
temp_val+=Get_Adc(ch);
delay_ms(5);
}
return temp_val/times;
}
( 3、 ... and ) The main program
main.c Part of the code
int main(void)
{
u16 key;
int adc,cnt=0;
float volt;
delay_init();
NVIC_Configuration();
BEEP_Init();
OLED_Init();
OLED_Clear();
uart_init(115200);
printf(" Welcome to the dust health gadget \r\n");
KEY_Init();
LED_Init();
TIM3_Int_Init(500-1,720-1);
DEV_Init();
OLED_Clear();
OLED_Dis_Menu();
while(1)
{
if(cnt++ ==1000)
{
cnt = 0;
LED0=!LED0;
adc = Get_Adc_Average(0,5);
volt = adc*3.3/4096;
air = pow((3.4880*10*volt)/(5-volt),(1.0/0.3203));
printf("air :%d\r\n",air);
// Get temperature and humidity
DHT11_Read_Data( &temp, &humi);
if(last_temp!=temp || last_humi!=humi)
{
OLED_Dis_DHT(temp,humi,air);
}
}
key = Key_GetValue(); // Key scan
if(key)
DealKeyVal(key);
if(!KEY1_IO())
{
printf("%d\r\n",GetTime());
}
if(temp>Max_temp || humi>Max_humi || air>Max_air)
{
if(cnt<500)BEEP=1;
else if(cnt<1000)BEEP=0;
}else BEEP=0;
delay_ms(1);
}
}
边栏推荐
- MySQL practice: 4 Operation of data
- swift 代码实现方法调用
- Chapter VIII (classes and objects)
- Power apps application practice | easily develop employee leave attendance management applet with power apps
- Microcontroller from entry to advanced
- Idea uses regular expressions for global substitution
- Interview JS and browser
- 73b2d wireless charging and receiving chip scheme
- JS Date object
- Flume learning notes
猜你喜欢

JMeter performance testing - Basic Concepts

Baoyan postgraduate entrance examination interview - Network

Chapter 5 (array)

X-VLM多模态模型解读
ASP. Net and Net framework and C #

Chapter 4 (functions and preprocessing)

Idea auto Guide
Design of reverse five times voltage amplifier circuit

See which processes occupy specific ports and shut down

Calculation of decoupling capacitance
随机推荐
Use a switch to control the lighting and extinguishing of LEP lamp
Uniapp scrolling load (one page, multiple lists)
Vs2019-mfc setting edit control and static text font size
Comparison version number [leetcode]
RF filter
Pychart connects to Damon database
Detailed explanation of SOC multi-core startup process
Baoyan postgraduate entrance examination interview - operating system
Pic 10B parsing
Area of Blue Bridge Cup 2 circle
MySQL query time period
Project practice: parameters of pycharm configuration for credit card digital recognition and how to use opencv in Anaconda
SOC的多核启动流程详解
JS file message invalid character error
[issue 22] sheen cloud platform one side & two sides
swift 代码实现方法调用
STM32 encountered problems using encoder module (library function version)
h5 localStorage
Idea auto Guide
Uploading pictures with FileReader object