当前位置:网站首页>VL53L0X V2激光测距传感器 采集距离数据串口输出
VL53L0X V2激光测距传感器 采集距离数据串口输出
2022-08-03 09:57:00 【优信电子】
一、简介
激光测距传感器模块功耗小,体积小,安装方便。它是根据红外LED发光,照射到被测物体后,返回光经过MCU接收,MCU计算时间差得到距离,直接输出距离值。
VL53LOX是新一代完全集成的传感器,配有嵌入式红外、人眼安全激光,先进的滤波器和超高速光子探测阵列,测量距离更长,速度和精度更高。
激光测距传感器的感测能力可以支持各种功能,包括各种创新用户界面的手势感应或接近检测,扫地机器人、服务性机器人的障碍物探测与防撞系统,家电感应面板、笔记本电脑的用户存在检测或电源开关监控器,以及无人机和物联网产品等。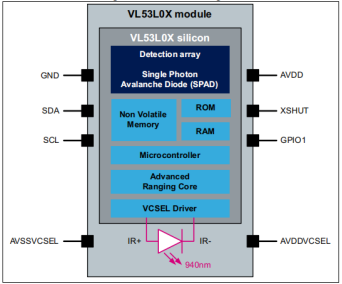
VL53LOX进行IIC通讯地址说明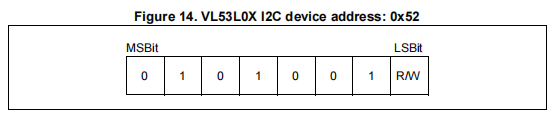
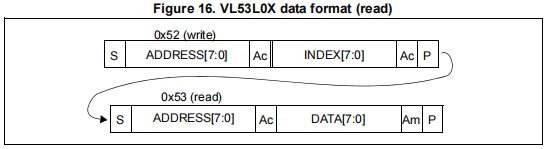
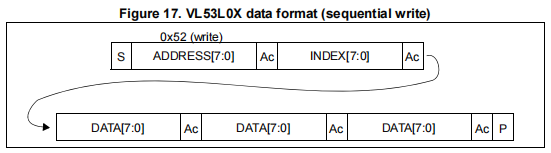
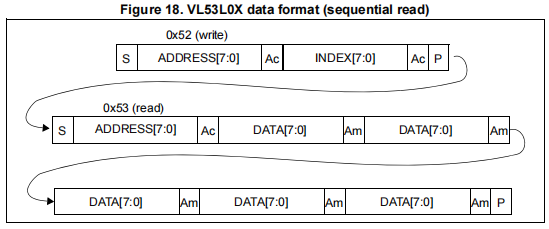
VL53LOX读写说明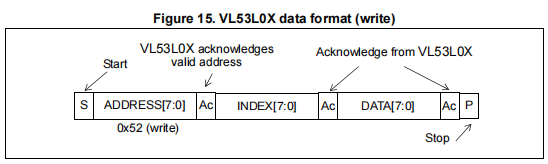
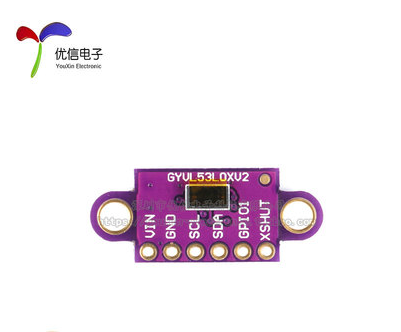
引脚说明
| 名称 | 描述 |
|---|---|
| VIN | 电源3~5V |
| GND | 接地 |
| SCL | IIIC串行时钟线 |
| SDA | IIC串行数据线 |
| GPIO1 | 中断 |
| XSHUT | 复位 |
二、使用前准备


| VL53L0X V2激光测距模块 激光测距传感器 ToF飞行时间测距 | 1个 |
|---|---|
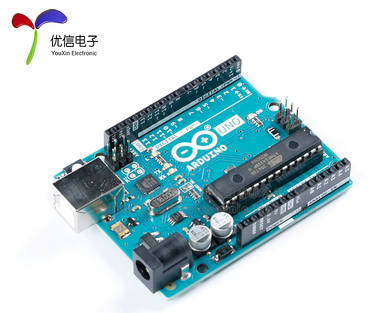
| 原装正版Arduino uno r3开发板 | 1个 |
| USB2.0打印机数据线高速方口连接转接线 A公对B公 | 1条 |
| 杜邦线 | 若干 |
三、测试方法
用USB2.0打印机数据线高速方口连接转接线与Arduino uno r3开发板连接在一起。Arduino uno r3开发板和VL53L0X V2激光测距模块连接,如下图所示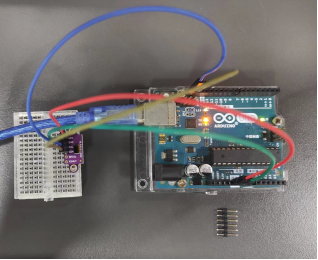
接线
5V —— VCC
GND —— GND
SCL —— SCL
SDA —— SDA
安装Arduino IDE ,打开ArduinoIDE,先安装【IRremote】库,点击【项目】,再点击【新建】,输入代码,如下图所示
,打开ArduinoIDE,先安装【IRremote】库,点击【项目】,再点击【新建】,输入代码,如下图所示
最后点击上传,如下图所示
代码如下:
/* This example shows how to get single-shot range measurements from the VL53L0X. The sensor can optionally be configured with different ranging profiles, as described in the VL53L0X API user manual, to get better performance for a certain application. This code is based on the four "SingleRanging" examples in the VL53L0X API. The range readings are in units of mm. */
#include <Wire.h>
#include <VL53L0X.h>
VL53L0X sensor;
// Uncomment this line to use long range mode. This
// increases the sensitivity of the sensor and extends its
// potential range, but increases the likelihood of getting
// an inaccurate reading because of reflections from objects
// other than the intended target. It works best in dark
// conditions.
//#define LONG_RANGE
// Uncomment ONE of these two lines to get
// - higher speed at the cost of lower accuracy OR
// - higher accuracy at the cost of lower speed
//#define HIGH_SPEED
//#define HIGH_ACCURACY
void setup()
{
Serial.begin(9600);
Wire.begin();
sensor.init();
sensor.setTimeout(500);
#if defined LONG_RANGE
// lower the return signal rate limit (default is 0.25 MCPS)
sensor.setSignalRateLimit(0.1);
// increase laser pulse periods (defaults are 14 and 10 PCLKs)
sensor.setVcselPulsePeriod(VL53L0X::VcselPeriodPreRange, 18);
sensor.setVcselPulsePeriod(VL53L0X::VcselPeriodFinalRange, 14);
#endif
#if defined HIGH_SPEED
// reduce timing budget to 20 ms (default is about 33 ms)
sensor.setMeasurementTimingBudget(20000);
#elif defined HIGH_ACCURACY
// increase timing budget to 200 ms
sensor.setMeasurementTimingBudget(200000);
#endif
}
void loop()
{
Serial.print(sensor.readRangeSingleMillimeters());
if (sensor.timeoutOccurred()) {
Serial.print(" TIMEOUT"); }
Serial.println();
}
四、实验现象
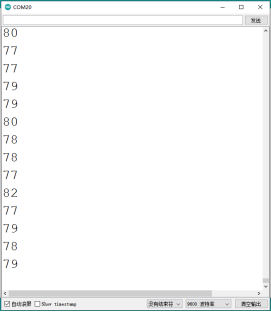
程序下载进去之后,显示测量的距离78mm。
总结
注意事项
(1)波特率要选择正确。
(2)要先安装【VL53L0X】库。
边栏推荐
猜你喜欢



随机推荐
Scapy的介绍(一)「建议收藏」
Index (3)
MySQL_关于JSON数据的查询
Flink Yarn Per Job - Submit application
Partition table (1)
Redis实现分布式锁
Apple Silicon配置二进制环境(二)
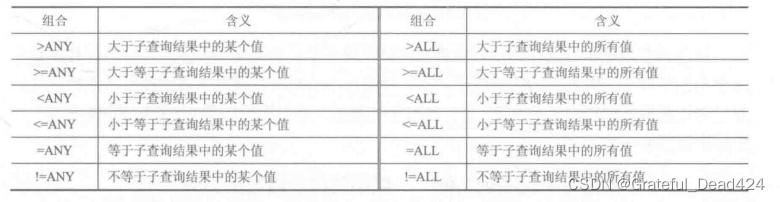
子查询和关联查询的区别
Cartesi 2022 年 7 月回顾
mysql的union和union all
10 Convolutional Neural Networks for Deep Learning 2
ECCV2022 | RU&谷歌:用CLIP进行zero-shot目标检测!
When deleting a folder, the error "Error ox80070091: The directory is not empty" is reported. How to solve it?
使用GBase 8c数据库的时候,遇到这种报错“[[email protected] ~]$ /home/gbase/script/gha_ctl install -p……
redis实现分布式锁的原理
【LeetCode】zj面试-把字符串转换成整数
如何优雅的消除系统重复代码
梯度消失和梯度爆炸
STP生成树(端口状态+端口角色+收敛机制 )|||| STP优化技术( uplinkfast技术+Portfast技术+backbonefast技术 )详解
milvus