当前位置:网站首页>Racecar multi-point navigation experiment based on ROS communication mechanism
Racecar multi-point navigation experiment based on ROS communication mechanism
2022-07-24 09:13:00 【Bobo plays ROS】
be based on ROS Multipoint navigation experiment of communication mechanism
- One 、 The experiment purpose
- Two 、 Experimental environment
- 3、 ... and 、 Experimental principle
- Four 、 Experimental content
- 5、 ... and 、 The experimental steps
- 1. obtain rviz Send target point's topic;
- 2. Obtain the coordinates of the corresponding target points for the built map ( Multiple , That is, the target of the car ), Finish the construction before the construction ;
- 3. Access to information , Write and publish a target point python or c Script ;
- 4. Write and publish multiple target points python or c Script .
- 6、 ... and 、 Experimental data and result evaluation
One 、 The experiment purpose
- 1. Learn more ROS Communication mechanism ;
- 2. understand Turtlebot The relationship between nodes ;
- 3. Familiar use ROS Message type ;
- 4. Understand the closed-loop control of the trolley .
- 5. understand rviz How to send the target point .
Two 、 Experimental environment
Ubuntu16.04+ROS .
3、 ... and 、 Experimental principle
Publisher subscriber implementation , The publisher sends out the target point , Subscribers receive post control Turtlebo For navigation .
Four 、 Experimental content
- 1. obtain rviz Send target point's topic;
- 2. Obtain the coordinates of the corresponding target points for the built map ( Multiple , That is, the target of the car ), Finish the construction before the construction ;
- 3. Access to information , Write and publish a target point python or c Script ;
- 4. Write and publish multiple target points python or c Script .
5、 ... and 、 The experimental steps
1. obtain rviz Send target point's topic;

2. Obtain the coordinates of the corresponding target points for the built map ( Multiple , That is, the target of the car ), Finish the construction before the construction ;
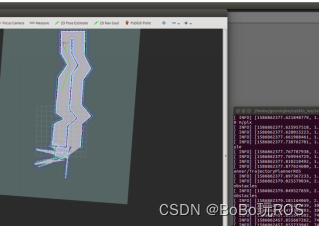
open gazebo roslaunch nav_sim myrobot_world.launch
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
By moving the car , Set the target point , Record the position coordinates displayed on the left .x y z And wrap separately xyz Angle of axis rotation :roll pitch yaw
3. Access to information , Write and publish a target point python or c Script ;
#include<iostream>
#include <ros/ros.h>
#include<geometry_msgs/Twist.h>
#include<geometry_msgs/PoseStamped.h>
using namespace std;
int flag=1;
class Goal{
public:
geometry_msgs::PoseStamped goal;
Goal(){
pub=n.advertise<geometry_msgs::PoseStamped>("/move_base_simple/goal",10);
sub=n.subscribe("/cmd_vel",1,&Goal::callback,this);
goal.header.frame_id = "map";
// Instead, record the coordinates of the target point by yourself
goal.pose.position.x = pose.x;
goal.pose.position.y = pose.y;
goal.pose.position.z = pose.z;
goal.pose.orientation.x = pose._x;
goal.pose.orientation.y = pose._y;
goal.pose.orientation.z = pose._z;
goal.pose.orientation.w = pose._w;
}
private:
ros::NodeHandle n;
ros::Publisher pub;
ros::Subscriber sub;
void callback(const geometry_msgs::Twist &v);
};
void Goal::callback(const geometry_msgs::Twist &v)
{
if(flag==1&&v.linear.x==0){
ROS_INFO("Sending goal!");
pub.publish(goal);
}
}
int main(int argc,char **argv)
{
ros::init(argc,argv,"send_goal");
Goal g;
ros::spin();
return 0;
}
4. Write and publish multiple target points python or c Script .
#include<iostream>
#include <ros/ros.h>
#include<geometry_msgs/Twist.h>
#include<geometry_msgs/PoseStamped.h>
using namespace std;
int flag=1;
int g1=0,g2=0,g3=0;
class Goal{
public:
geometry_msgs::PoseStamped goal_1;
geometry_msgs::PoseStamped goal_2;
geometry_msgs::PoseStamped goal_3;
Goal(){
pub=n.advertise<geometry_msgs::PoseStamped>("/move_base_simple/goal",10);
sub=n.subscribe("/cmd_vel",1,&Goal::callback,this);
goal_1.header.frame_id = "map";
goal_2.header.frame_id = "map";
goal_3.header.frame_id = "map";
// The following three goals are changed to the information of your goal points
//Goal one
goal_1.pose.position.x = 0.033449;
goal_1.pose.position.y = 8.273015;
goal_1.pose.position.z = 0.050003;
goal_1.pose.orientation.x = 0;
goal_1.pose.orientation.y = 0;
goal_1.pose.orientation.z = 0;
goal_1.pose.orientation.w = 1.487145;
//Goal two
goal_2.pose.position.x = -0.207746;
goal_2.pose.position.y = 17.607371;
goal_2.pose.position.z = 0.050003;
goal_2.pose.orientation.x = 0;
goal_2.pose.orientation.y = 0;
goal_2.pose.orientation.z = 0;
goal_2.pose.orientation.w = 1.483080;
//Goal three
goal_3.pose.position.x = 2.467109;
goal_3.pose.position.y = 9.938154;
goal_3.pose.position.z = 0.050002;
goal_3.pose.orientation.x = 0;
goal_3.pose.orientation.y = 0;
goal_3.pose.orientation.z = 0;
goal_3.pose.orientation.w = -1.889479;
}
private:
ros::NodeHandle n;
ros::Publisher pub;
ros::Subscriber sub;
void callback(const geometry_msgs::Twist &v);
};
void Goal::callback(const geometry_msgs::Twist &v){
// Send the first target point , If the transmission is successful ,v Will be bigger than the 0
if(flag==1&&v.linear.x==0){
ROS_INFO("Sending goal one!");
pub.publish(goal_1);
g1=1;
}
if(v.linear.x>0&&flag==1)
flag=2;
if(flag==2&&v.linear.x==0&&g1){
ROS_INFO("Sending goal two!");
pub.publish(goal_2);
g2=1;
}
if(v.linear.x>0&&flag==2&&g2)
flag=3;
if(flag==3&&v.linear.x==0&&g2){
ROS_INFO("Sending goal three!");
pub.publish(goal_3);
g3=1;
}
}
int main(int argc,char **argv)
{
ros::init(argc,argv,"many_goal");
Goal g;
ros::spin();
return 0;
}
stay CMakeLists.txt Add... To the file
add_executable(send_goal src/send_goal.cpp)
target_link_libraries(send_goal ${catkin_LIBRARIES})
add_executable(many_goal src/many_goal.cpp)
target_link_libraries(many_goal ${catkin_LIBRARIES})
stay move_base.launch Start... In file send_goal.cpp or many_goal.cpp
Add two lines :
<!--node pkg="nav_sim" type="send_goal" respawn="false" name="send_goal" output="screen"/-->
<node pkg="nav_sim" type="many_goal" respawn="false" name="many_goal" output="screen"/>
After successful compilation : function
roslaunch nav_sim myrobot_world.launch
roslaunch nav_sim move_base.launch
6、 ... and 、 Experimental data and result evaluation
experimental data :
- 1. Target points :3 individual
- 2. Target location :
one0.033449;y:8.273015;z:0.050003;_x:0;_y:0;_z:0;_w:1.487145;
two-0.207764;y:17.607371;z:0.050003;_x:0;_y:0;_z:0;_w:1.483080;
three2.467109;y:9.938154;z:0.050002;_x:0;_y:0;_z:0;_w:-1.889479; - 3. Coordinate system frame_id :map
Result evaluation :
1. Whether the script can send the target point
Sure , But it needs to be manually 2D Nav Goal
2.Turtlebot Can you continue to send the second target point after reaching a target point
Sure 

notes : It can also be done without Turtlebot, Use nav _sim Bag car or racecar Of minicar.
Last week's task :
边栏推荐
- 【我的创作一周年纪念日】爱情是需要被纪念的,创作也是
- 超全总结:Go语言如何操作文件
- 代码随想录笔记_链表_25K个一组翻转链表
- JUC powerful auxiliary class
- C# 简述里氏替换原则的应用
- How should tiktok account operate?
- What is the "age limit" on tiktok and how to solve it?
- Why does TCP shake hands three times instead of two times (positive version)
- 排序入门—插入排序和希尔排序
- Android系统安全 — 5.2-APK V1签名介绍
猜你喜欢

Why does TCP shake hands three times instead of two times (positive version)
Let's test 5million pieces of data. How to use index acceleration reasonably?

Why is TCP a triple handshake

The detailed process of building discuz forum is easy to understand

gnuplot软件学习笔记

(5) Cloud integrated gateway gateway +swagger documentation tool

Detailed explanation of the whole process of R & D demand splitting | agile practice

Protocol buffers 的问题和滥用

Tiflash source code reading (V) deltatree storage engine design and implementation analysis - Part 2

Little dolphin "transformed" into a new intelligent scheduling engine, which can be explained in simple terms in the practical development and application of DDS
随机推荐
在npm上发布自己的库
[the first anniversary of my creation] love needs to be commemorated, so does creation
Wildcards in MySQL like statements: percent, underscore, and escape
【基于ROS的URDF练习实例】四轮机器人与摄像头的使用
The difference between classification and regression
Interviewer: man, how much do you know about the read-write lock of go language?
Account 1-3
Un7.22: how to upload videos and pictures simultaneously with the ruoyi framework in idea and vs Code?
Paclitaxel loaded tpgs reduced albumin nanoparticles /ga-hsa gambogic acid human serum protein nanoparticles
DP longest common subsequence detailed version (LCS)
The difference between & &, | and |
How should tiktok account operate?
What is the component customization event we are talking about?
Map processing background management menu data
Asyncdata cross domain error after nuxt route switching
Linked list - 19. Delete the penultimate node of the linked list
Re6:读论文 LeSICiN: A Heterogeneous Graph-based Approach for Automatic Legal Statute Identification fro
Leetcode question brushing series -- 174. Dungeon games
How can tiktok transport videos not be streaming limited?
web安全入门-开源防火墙Pfsense安装配置