当前位置:网站首页>Anchor free detector: centernet
Anchor free detector: centernet
2022-07-27 10:01:00 【yfy2022yfy】
2019/07/15, Reprint please indicate
Address of thesis :https://arxiv.org/abs/1904.07850
Source code :https://github.com/xingyizhou/CenterNet
One 、 Abstract
At present, more successful detectors , They all list a lot of potential target locations , Then classify each , After that, we need to add post-processing , The author believes that this practice is still inefficient .
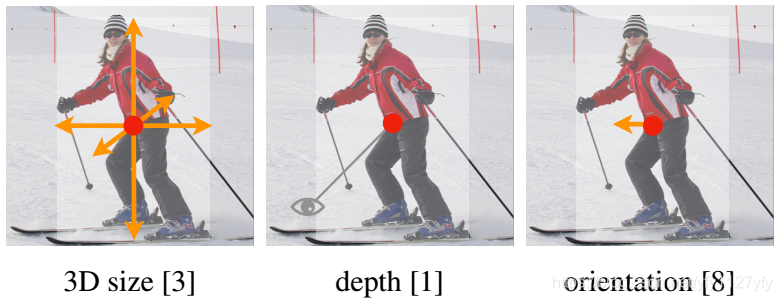
In this paper , The author put A goal is modeled as a point -- The center point of the target detection frame . The detector estimates through key points , Find the center point , And return to other attributes , such as size,3D Location , Direction and even posture .
CenterNet stay MS COCO The best speed accuracy performance is achieved on the data set :
- 28.1%AP @142fps
- 37.4%AP @52fps
- 45.1%AP @1.4fps( Multi scale testing ).
Two 、 primary coverage
1、 Methods to introduce
In this paper , The author modeled a goal as a point -- The center point of the target detection frame . The detector estimates through key points , Find the center point , And return to other attributes , such as size,3D Location , Direction and even posture .
object detection It has become a standard key point prediction problem :
- Input the picture into the full convolution network to generate heatmap, The peak value of the heat map corresponds to the target center ;
- Predict the width and height of the target detection frame according to the picture features at the peak ;
in addition , Output additional predictions at the center , Can be done 3d object detection , And multi person posture estimation :
- about 3D Box estimates , We return to the absolute depth of the object 、 3、 ... and D Box size and object orientation
- For human posture estimation , We regard the two-dimensional joint point as the central position + Offset , Direct regression offset
2、 As before based on anchor Comparison of methods
This method and is based on anchor Of one stage The method is similar to . The center point itself can also be regarded as a box with unknown shape anchor.
The difference is :
- Center point anchor Allocation is only based on location , Don't consider IoU, There is no threshold and classification ;
- A goal has only one positive example center , no need NMS, But simply from heatmap Take the peak .
- CenterNet Higher output resolution , Output stride=4, Compared with the traditional stride=16.
3、 Output thermal diagram
The network output result is down sampling stride=4. The author uses several full convolutional codes - Decode the network prediction heat map : Stacked Hourglass The Internet , On the sampling ResNet, And deep polymerization DLA.
First calculate GT Key points , Using Gauss check GT Point and adjacent pixel calculation . If there is overlap after Gaussian calculation , Then the maximum value is used for each pixel . Use during training focal loss.
To compensate for downsampling (stride=4) Resulting quantization error , We additionally predicted the center point offset , For training L1 loss.
4、 The central point is the goal
Suppose the coordinates of the target box are  . Center point
. Center point  Output from the thermodynamic diagram network . in addition , You can return to the target frame width and height
Output from the thermodynamic diagram network . in addition , You can return to the target frame width and height  . Considering the amount of calculation , Here, only the output thermal map is used to predict the size of the target frame , Use L1 loss.
. Considering the amount of calculation , Here, only the output thermal map is used to predict the size of the target frame , Use L1 loss.
The author uses a network to predict key points at the same time 、 Center point offset 、 And scale , common C+4 results ( For key points C A thermodynamic diagram shows ) By the way , The value of the center point is 0~1 between , Is confidence . All outputs share a backbone , Then each output will use one 3x3 Convolution ,ReLU and 1x1 Convolution .

- Heat map C The thermodynamic diagrams of this category share C individual .
- It is written that every thermodynamic diagram has n A peak , The author sets the maximum 100, I understand it is multi-target detection .
- Each target has a corresponding center point and frame size
5、 Detection extension
In addition to output target detection , This method can be in the same form , increase 3D testing 、 The branch of human posture estimation .

6、 experimental result
(1) object detection


Most of the one-stage detector , Single scale / Multiscale testing .
(2)3D object detection

(3) Human posture estimation

There is an appendix after the quotation of the paper , If you are interested, you can have a look .
边栏推荐
- 3D face reconstruction and dense alignment with position map progression network
- 活体检测综述
- Talk about 10 scenarios of index failure. It's too stupid
- Understand chisel language. 25. Advanced input signal processing of chisel (I) -- asynchronous input and de jitter
- StyleGAN论文笔记+修改代码尝试3D点云生成
- Gbase 8A MPP cluster capacity expansion practice
- 刷题《剑指Offer》day04
- Practice and exploration of overseas site Seata of ant group
- Understand chisel language. 24. Chisel sequential circuit (IV) -- detailed explanation of chisel memory
- PCL的ICP配准示例
猜你喜欢
中高级试题」:MVCC 实现原理是什么?

语音直播系统——开发推送通知需要遵守的原则

安装了HAL库如何恢复原来的版本

Provincial Emergency Management Department: Guangzhou can strive to promote the experience of emergency safety education for children

吃透Chisel语言.23.Chisel时序电路(三)——Chisel移位寄存器(Shift Register)详解

吃透Chisel语言.27.Chisel进阶之有限状态机(一)——基本有限状态机(Moore机)

C # set different text watermarks for each page of word

LeetCode.814. 二叉树剪枝____DFS

华为交换机双上行组网Smart-link配置指南

XML overview
随机推荐
Snowflake vs. Databricks谁更胜一筹?2022年最新战报
Talk about 10 scenarios of index failure. It's too stupid
3D人脸重建:Joint 3D Face Reconstruction and Dense Alignment with position Map Regression Network
3D restoration paper: shape painting using 3D generative advantageous networks and recurrent revolutionary networks
深度剖析分库分表最强辅助Sharding Sphere
Summary of binary tree exercises
Gbase 8A MPP cluster capacity expansion practice
PCL的ICP配准示例
Meeting seating function of conference OA project & Implementation of meeting submission for approval
超赞的卡尔曼滤波详解文章
MOS drive in motor controller
吃透Chisel语言.26.Chisel进阶之输入信号处理(二)——多数表决器滤波、函数抽象和异步复位
注解与反射
Concurrent thread state transition
Review of in vivo detection
面试必备:虾皮服务端15连问
GBase 8a MPP集群扩容实战
Simple use of tflite
食品安全 | 垃圾食品越吃越想吃?这份常见食品热量表请收好
Annotation and reflection