当前位置:网站首页>【Paper】2016_ A Learning-Based Fault Tolerant Tracking Control of an Unmanned Quadrotor Helicopter
【Paper】2016_ A Learning-Based Fault Tolerant Tracking Control of an Unmanned Quadrotor Helicopter
2022-06-30 04:34:00 【Zhao-Jichao】
List of articles
1 Introduction
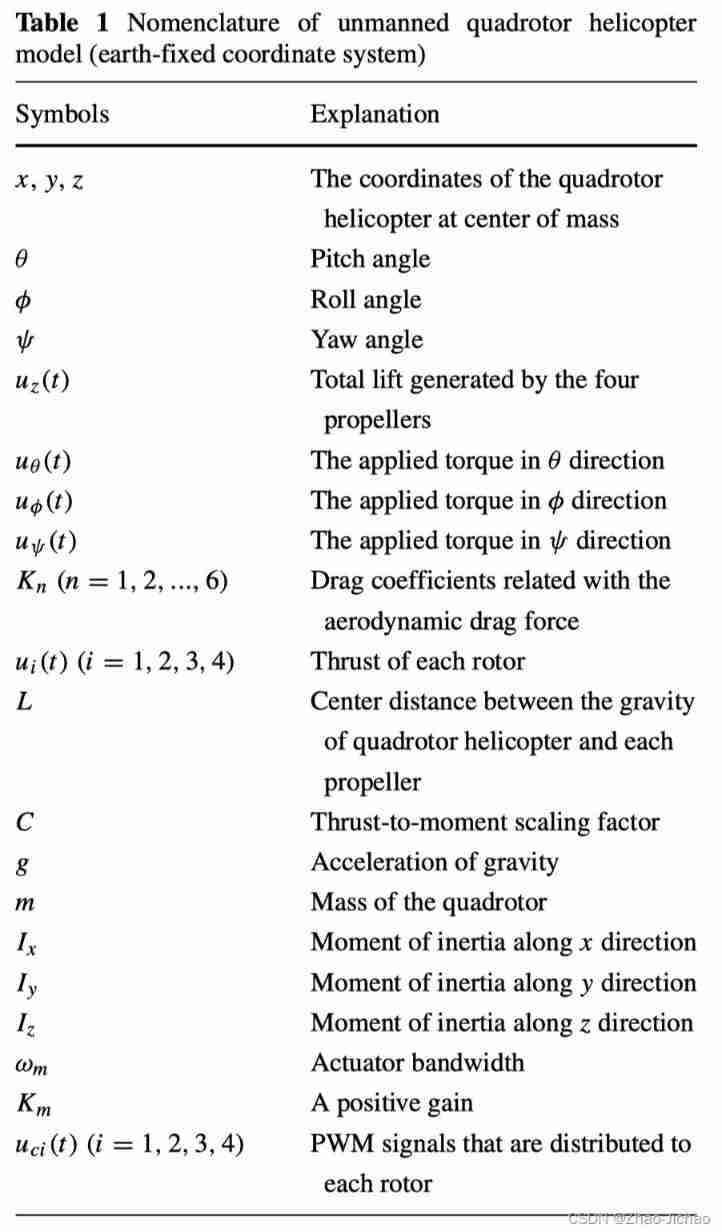
2 Description and Dynamics of the Unmanned Quadrotor Helicopter

Pictured 1 Shown , thrust ( u 1 , u 2 , u 3 , u 4 u_1, u_2, u_3, u_4 u1,u2,u3,u4) It consists of four parts respectively arranged in the front corner 、 Back corner 、 The propeller driven by the independent motor in the left and right corners . The front and rear motors rotate clockwise , The left and right motors rotate counterclockwise . The resulting thrust is z B z _B zB Always up in the direction .
therefore ,1) The vertical translation can be realized by directly distributing the same number of control signals to each motor ; 2) Horizontal translation requires the four rotor helicopter to roll or pitch in advance , This allows for forward or lateral movement . Besides , Roll and pitch rotation can be achieved by assigning different amounts of control signals to the opposite motors , This forces the four rotor helicopter to tilt towards the slowest motor [1].
2.1 Nonlinear Model of the Unmanned Quadrotor Helicopter
utilize [28] and [29] Four rotor helicopter model in , The commonly used dynamic models of four rotor helicopters in the earth fixed coordinate system can be :
{ x ¨ = ( cos ϕ sin θ cos ψ + sin ϕ sin ψ ) u 1 ( t ) − K 1 x ˙ m y ¨ = ( cos ϕ sin θ sin ψ − sin ϕ cos ψ ) u 1 ( t ) − K 2 y ˙ m z ¨ = ( cos ϕ cos θ ) u z ( t ) − K 3 z ˙ m − g ϕ ¨ = u 3 ( t ) − K 4 ϕ ˙ I x θ ¨ = u 2 ( t ) − K 5 θ ˙ I y ψ ¨ = u 4 ( t ) − K 6 ψ ˙ I z (1) \left\{\begin{aligned} \ddot{x} &= \frac{(\cos\phi \sin\theta \cos\psi + \sin\phi \sin\psi)~ u_1(t) - K_1 \dot{x}}{m} \\ \ddot{y} &= \frac{(\cos \phi \sin\theta \sin\psi - \sin\phi \cos\psi)~ u_1(t) - K_2 \dot{y}}{m} \\ \ddot{z} &= \frac{(\cos\phi \cos\theta)~ u_z(t) - K_3 \dot{z}}{m} - g \\ \ddot{\phi} &= \frac{u_3(t) - K_4 \dot{\phi}}{I_x} \\ \ddot{\theta} &= \frac{u_2(t) - K_5 \dot{\theta}}{I_y} \\ \ddot{\psi} &= \frac{u_4(t) - K_6 \dot{\psi}}{I_z} \\ \end{aligned}\right. \tag{1} ⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎧x¨y¨z¨ϕ¨θ¨ψ¨=m(cosϕsinθcosψ+sinϕsinψ) u1(t)−K1x˙=m(cosϕsinθsinψ−sinϕcosψ) u1(t)−K2y˙=m(cosϕcosθ) uz(t)−K3z˙−g=Ixu3(t)−K4ϕ˙=Iyu2(t)−K5θ˙=Izu4(t)−K6ψ˙(1)
Acceleration and lift / The relationship between moments is expressed as :
[ u z ( t ) u θ ( t ) u ϕ ( t ) u ψ ( t ) ] = [ 1 1 1 1 L − L 0 0 0 0 L − L C C − C − C ] [ u c 1 ( t ) u c 2 ( t ) u c 3 ( t ) u c 4 ( t ) ] (2) \begin{aligned} \left[\begin{matrix} u_z(t) \\ u_\theta(t) \\ u_\phi(t) \\ u_\psi(t) \\ \end{matrix}\right]&= \left[\begin{matrix} 1 & 1 & 1 & 1 \\ L & -L & 0 & 0 \\ 0 & 0 & L & -L \\ C & C & -C & -C \\ \end{matrix}\right] \left[\begin{matrix} u_{c1}(t) \\ u_{c2}(t) \\ u_{c3}(t) \\ u_{c4}(t) \\ \end{matrix}\right] \end{aligned} \tag{2} ⎣⎢⎢⎡uz(t)uθ(t)uϕ(t)uψ(t)⎦⎥⎥⎤=⎣⎢⎢⎡1L0C1−L0C10L−C10−L−C⎦⎥⎥⎤⎣⎢⎢⎡uc1(t)uc2(t)uc3(t)uc4(t)⎦⎥⎥⎤(2)
Each motor is modulated by its corresponding pulse width (PWM) Signal control , The relationship is defined as :
u i ( t ) = K m ω m s + ω m u c i ( t ) (3) u_i(t) = K_m \frac{\omega_m}{s+\omega_m} u_{ci}(t) \tag{3} ui(t)=Kms+ωmωmuci(t)(3)
2.2 Linearized Model of the Unmanned Quadrotor Helicopter
Assumption 1
It is assumed that the four rotor unmanned helicopter is in hover during operation [20], This indicates that in the vertical direction u z ≈ m g u_z \approx mg uz≈mg. The change range of pitch angle and roll angle is also relatively small , Yes sin ϕ ≈ ϕ , sin θ ≈ θ \sin \phi \approx \phi, \sin \theta \approx \theta sinϕ≈ϕ,sinθ≈θ, And there is no heading angle change ψ ≈ 0 \psi \approx 0 ψ≈0. in addition , When the UAV moves very slowly , The drag coefficient is negligible .
Then according to the above assumption 1, Can simplify formula (1) Turn into
{ x ¨ = θ g y ¨ = − ϕ g z ¨ = u z ( t ) / m − g I x θ ¨ = u θ ( t ) I y ϕ ¨ = u ϕ ( t ) I z ψ ¨ = u ψ ( t ) (4) \begin{aligned} \left\{\begin{aligned} &\ddot{x} = \theta g \\ &\ddot{y} = - \phi g \\ &\ddot{z} = u_z(t)/m - g \\ &I_{x} \ddot{\theta} = u_{\theta}(t) \\ &I_{y} \ddot{\phi} = u_{\phi}(t) \\ &I_{z} \ddot{\psi} = u_{\psi}(t) \\ \end{aligned}\right. \end{aligned} \tag{4} ⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎧x¨=θgy¨=−ϕgz¨=uz(t)/m−gIxθ¨=uθ(t)Iyϕ¨=uϕ(t)Izψ¨=uψ(t)(4)
further , When taking the UAV and its actuator as a whole , Actuator dynamics can be neglected in the design of control system , And will not cause significant residual error , This is because the time constant of the actuator is much smaller than that of the UAV [30].
So the formula (3) It can be simplified to K m ω m s + ω m ≈ K m K_m \frac{\omega_m}{s+\omega_m} \approx K_m Kms+ωmωm≈Km, This can still be used to describe the effectiveness of control behavior . therefore , The formula (2) Can be written as
[ u z ( t ) u θ ( t ) u ϕ ( t ) u ψ ( t ) ] = [ K m K m K m K m K m L − K m L 0 0 0 0 K m L − K m L K m C K m C − K m C − K m C ] [ u c 1 ( t ) u c 2 ( t ) u c 3 ( t ) u c 4 ( t ) ] (5) \begin{aligned} \left[\begin{matrix} u_z(t) \\ u_\theta(t) \\ u_\phi(t) \\ u_\psi(t) \\ \end{matrix}\right]&= \left[\begin{matrix} K_m & K_m & K_m & K_m \\ K_mL & -K_mL & 0 & 0 \\ 0 & 0 & K_mL & -K_mL \\ K_mC & K_mC & -K_mC & -K_mC \\ \end{matrix}\right] \left[\begin{matrix} u_{c1}(t) \\ u_{c2}(t) \\ u_{c3}(t) \\ u_{c4}(t) \\ \end{matrix}\right] \end{aligned} \tag{5} ⎣⎢⎢⎡uz(t)uθ(t)uϕ(t)uψ(t)⎦⎥⎥⎤=⎣⎢⎢⎡KmKmL0KmCKm−KmL0KmCKm0KmL−KmCKm0−KmL−KmC⎦⎥⎥⎤⎣⎢⎢⎡uc1(t)uc2(t)uc3(t)uc4(t)⎦⎥⎥⎤(5)
The Euler angular acceleration is mapped to the propeller speed .
边栏推荐
- Junior students summarize JS advanced interview questions
- Es2018 key summary
- Redis implements SMS login function (I) traditional session login
- 【WEBRTC】ADM: rtc_include_internal_audio_device 触发 RTC_DCHECK(adm) 断言
- Named pipes for interprocess communication
- Foreign SSL certificate
- Threejs realizes the simulation of river, surface flow, pipe flow and sea surface
- Detailed explanation of data link layer
- Slam mapping, automatic navigation and obstacle avoidance based on ROS (bingda robot)
- Detailed explanation of cookies and sessions
猜你喜欢

MySQL DDL change

File system and directory operations
The most comprehensive summary notes of redis foundation + advanced project in history

BeanFactory创建流程

System programming summary

Redis implements SMS login function (II) redis implements login function

How the FortiGate firewall rejects a port by using the local in policy policy

基于SSM框架茶叶商城系统【项目源码+数据库脚本+报告】

Junior students summarize JS advanced interview questions

How to use div boxes to simulate line triangles
随机推荐
Introduction to system programming
Myrpc version 2
Redis实现短信登入功能(二)Redis实现登入功能
iMile 利用 Zadig 多云环境周部署千次,跨云跨地域持续交付全球业务
Redis implements SMS login function (II) redis implements login function
Anonymous pipeline for interprocess communication
Interprocess communication
IO stream, byte stream read / write copy
[FPGA] IIC读写EEPROM 的实现
Myrpc version 5
基于servlet+jsp+mysql实现的工资管理系统【源码+数据库】
Paging query, using jdbc-- paging query
Redis实现短信登入功能(一)传统的Session登入
[learn FPGA programming from scratch -52]: high level chapter - FPGA development based on IP core - basic framework for IP core use (taking PLL as an example)
7-3 single source shortest circuit for strange play upgrade
Qt6 QML Book/Qt Quick 3D/Qt Quick 3D
Es2018 key summary
FortiGate firewall quick initialization administrator password
基于SSM框架茶叶商城系统【项目源码+数据库脚本+报告】
Find the interface and add parameters to the form