当前位置:网站首页>【ROS基础】rosbag 的使用方法
【ROS基础】rosbag 的使用方法
2022-08-02 06:38:00 【贾亚超】
1、rosbag record 记录数据
在开始记录rostopic之前,方便起见,先创建一个专门的文件夹,存放数据包:
mkdir ~/bagfiles
然后进入该文件夹,开始录制数据包:
cd ~/bagfiles
rosbag record -a
其中-a参数等价于--all,表示将当前发布的所有topic数据都录制保存到一个.bag文件中。也可以只记录某些感兴趣的topic,命令如下:
rosbag record /topic1 /topic2 /topic3
上述命令录制的.bag文件的名字为日期加时间。如果要指定生成数据包的名字,则用如下命令:
rosbag record -o fileName -a
rosbag record -O fileName.bag -a
-o PREFIX(小写o)等价于--output-prefix=PREFIX,只需指定文件名的前缀,其中PREFIX是需要自定义的文件名的前缀。-O NAME(大写O)等价于--output-name=NAME,需指定前缀和后缀,其中NAME是需要自定义的包含前后缀的完整的文件名。
注:
至此,还是有办法指定.bag文件路径的,下面在.launch文件中录制topic就不能指定路径了,有知道如何在.launch文件中指定.bag保存路径的请在万能的评论区留言,不胜感激。
2、在.launch文件中使用rosbag record
默认的保存路径为~/.ros,文件名默认为日期加时间。
<node pkg="rosbag" type="record" name="myBagRecord" args=" -O myBagName -a">
3、rosbag play 播放数据
rosbag play myRecord.bag //正常速度播放
rosbag play myRecord.bag --topic /topic1 /topic2 //仅播放指定的topic
rosbag play -r 10 myRecord.bag //10倍速播放数据
rosbag play -l myRecord.bag //循环播放
- 其中
-r FACTOR等价于--rate=FACTOR,FACTOR是需要用户自定义的倍速数 - 其中
-l等价于--loop
边栏推荐
猜你喜欢

宝塔+FastAdmin 404 Not Found
【CNN回归预测】基于matlab卷积神经网络CNN数据回归预测【含Matlab源码 2003期】
![(Notes are not completed) [Graph Theory] Traversal of graphs](/img/1d/d2909dcfa0ab5c207005971a7b4a2d.gif)
(Notes are not completed) [Graph Theory] Traversal of graphs
About the local server problem after ue4.27 pixel streaming package

每周推荐短视频:为什么产品开发需要数字化?如何做到数字化?
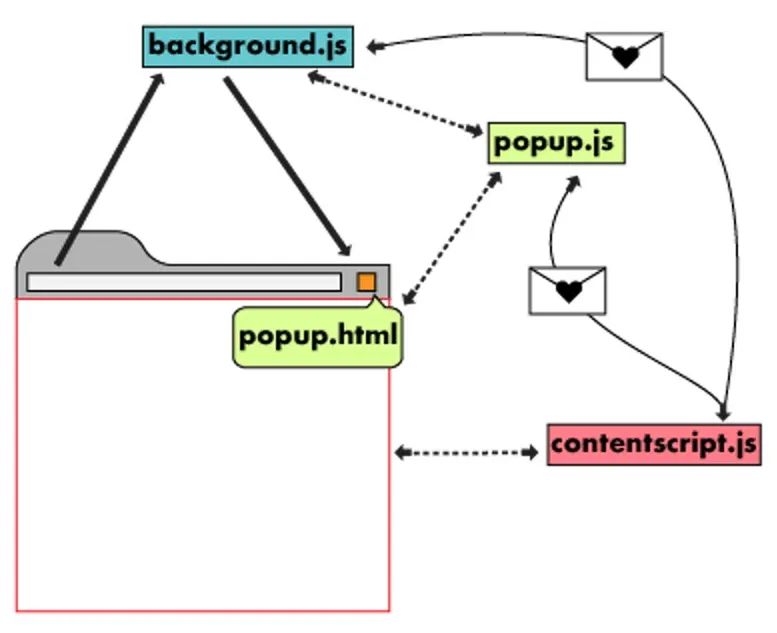
chrome plugin development guide
实例028:递归求等差数列
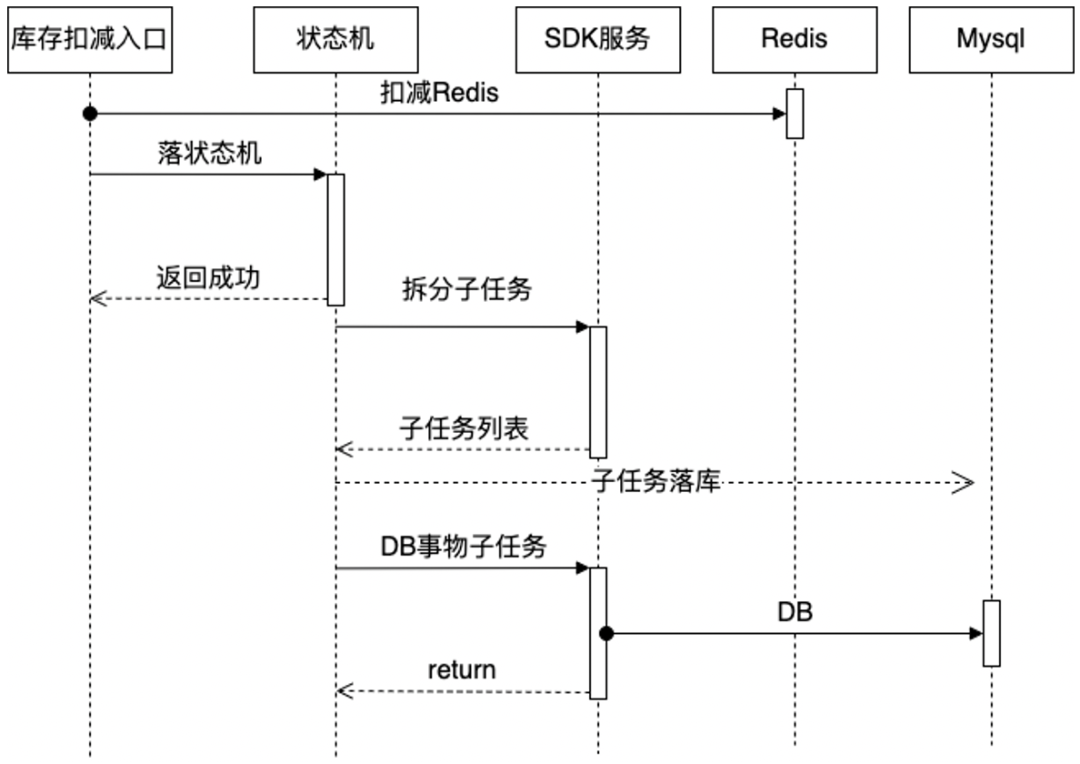
电商库存系统的防超卖和高并发扣减方案

Reverse resolve dns server
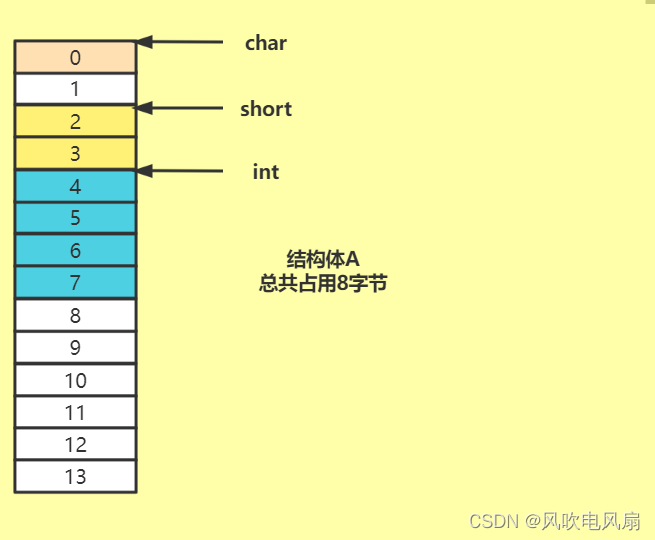
结构体大小计算--结构体内存对齐
随机推荐
2022夏暑假每日一题(六)
Vscode connect to remote server "Acquiring the lock on the/home / ~ 'problem
【机器学习】课程设计布置:某闯关类手游用户流失预测
C# FileInfo类
实验8 VLAN综合实验
Two good php debug tutorials
[数据集][VOC]男女数据集voc格式6188张
(部分不懂,笔记整理未完成)【图论】差分约束
Reverse resolve dns server
获取间隔的日期列表工具类
(Notes are not completed) [Graph Theory] Traversal of graphs
Ue after video tutorial first
[Dataset][VOC] Eyewear dataset 6000 in VOC format
【暑期每日一题】洛谷 P3156 【深基15.例1】询问学号
Specified URL is not reachable,caused by :‘Read timed out
2020美亚团队赛复盘
数据库概论之MySQL表的增删改查1
optional
分离轴定理SAT凸多边形精确碰撞检测
【故障诊断分析】基于matlab FFT轴承故障诊断【含Matlab源码 2001期】