当前位置:网站首页>ROS 之订阅多个topic时间同步问题
ROS 之订阅多个topic时间同步问题
2022-07-31 05:16:00 【xp_fangfei】
message_filters的介绍:
message_filters是一个用于roscpp和rospy的实用程序库。 它集合了许多的常用的消息“过滤”算法。消息过滤器message_filters类似一个消息缓存,当消息到达消息过滤器的时候,可能并不会立即输出,而是在稍后的时间点里满足一定条件下输出。
举个例子,比如时间同步器,它接收来自多个源的不同类型的消息,并且仅当它们在具有相同时间戳的每个源上接收到消息时才输出它们,也就是起到了一个消息同步输出的效果。
Time Synchronizer 时间同步器:
C++ message_filters::TimeSynchronizer API docs
Python message_filters.TimeSynchronizer
TimeSynchronizer过滤器通过包含在其头中的时间戳来同步输入通道,并以单个回调的形式输出它们需要相同数量的通道。 C ++实现可以同步最多9个通道。
例子(C++):
#include <message_filters/subscriber.h>
#include <message_filters/time_synchronizer.h>
#include <sensor_msgs/Image.h>
#include <sensor_msgs/CameraInfo.h>
using namespace sensor_msgs;
using namespace message_filters;
void callback(const ImageConstPtr& image, const CameraInfoConstPtr& cam_info)
{
// Solve all of perception here...
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "vision_node");
ros::NodeHandle nh;
message_filters::Subscriber<Image> image_sub(nh, "image", 1);
message_filters::Subscriber<CameraInfo> info_sub(nh, "camera_info", 1);
TimeSynchronizer<Image, CameraInfo> sync(image_sub, info_sub, 10);
sync.registerCallback(boost::bind(&callback, _1, _2));
ros::spin();
return 0;
}
Policy-Based Synchronizer 基于策略的同步器 :
Synchronizer filter同步过滤器通过包含在其头中的时间戳来同步输入通道,并以单个回调的形式输出它们需要相同数量的通道。 C ++实现可以同步最多9个通道。
Synchronizer过滤器在确定如何同步通道的策略上进行模板化。 目前有两个策略:ExactTime和ApproximateTime。
C++ Header: message_filters/synchronizer.h
例1(ExactTime):
#include <message_filters/subscriber.h>
#include <message_filters/synchronizer.h>
#include <message_filters/sync_policies/exact_time.h>
#include <sensor_msgs/Image.h>
#include <sensor_msgs/CameraInfo.h>
using namespace sensor_msgs;
using namespace message_filters;
void callback(const ImageConstPtr& image, const CameraInfoConstPtr& cam_info)
{
// Solve all of perception here...
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "vision_node");
ros::NodeHandle nh;
message_filters::Subscriber<Image> image_sub(nh, "image", 1);
message_filters::Subscriber<CameraInfo> info_sub(nh, "camera_info", 1);
typedef sync_policies::ExactTime<Image, CameraInfo> MySyncPolicy;
// ExactTime takes a queue size as its constructor argument, hence MySyncPolicy(10)
Synchronizer<MySyncPolicy> sync(MySyncPolicy(10), image_sub, info_sub);
sync.registerCallback(boost::bind(&callback, _1, _2));
ros::spin();
return 0;
}
例2(ApproximateTime):
#include <message_filters/subscriber.h>
#include <message_filters/synchronizer.h>
#include <message_filters/sync_policies/approximate_time.h>
#include <sensor_msgs/Image.h>
using namespace sensor_msgs;
using namespace message_filters;
void callback(const ImageConstPtr& image1, const ImageConstPtr& image2)
{
// Solve all of perception here...
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "vision_node");
ros::NodeHandle nh;
message_filters::Subscriber<Image> image1_sub(nh, "image1", 1);
message_filters::Subscriber<Image> image2_sub(nh, "image2", 1);
typedef sync_policies::ApproximateTime<Image, Image> MySyncPolicy;
// ApproximateTime takes a queue size as its constructor argument, hence MySyncPolicy(10)
Synchronizer<MySyncPolicy> sync(MySyncPolicy(10), image1_sub, image2_sub);
sync.registerCallback(boost::bind(&callback, _1, _2));
ros::spin();
return 0;
}
注意:实现以上三种时间同步的前提是消息体中有包含时间戳的头:
std_msg/Header
uint32 seq //存储原始数据类型uint32
time stamp //存储ROS中的时间戳信息
string frame_id //用于表示和此数据关联的帧,在坐标系变化中可以理解为数据所在的坐标系名称
边栏推荐
猜你喜欢
The server time zone value ‘й‘ is unrecognized or represents more than one time zone

unicloud 发布后小程序提示连接本地调试服务失败,请检查客户端是否和主机在同一局域网下
pytorch模型微调finetuning训练image_dog(kaggle)

flutter arr dependencies
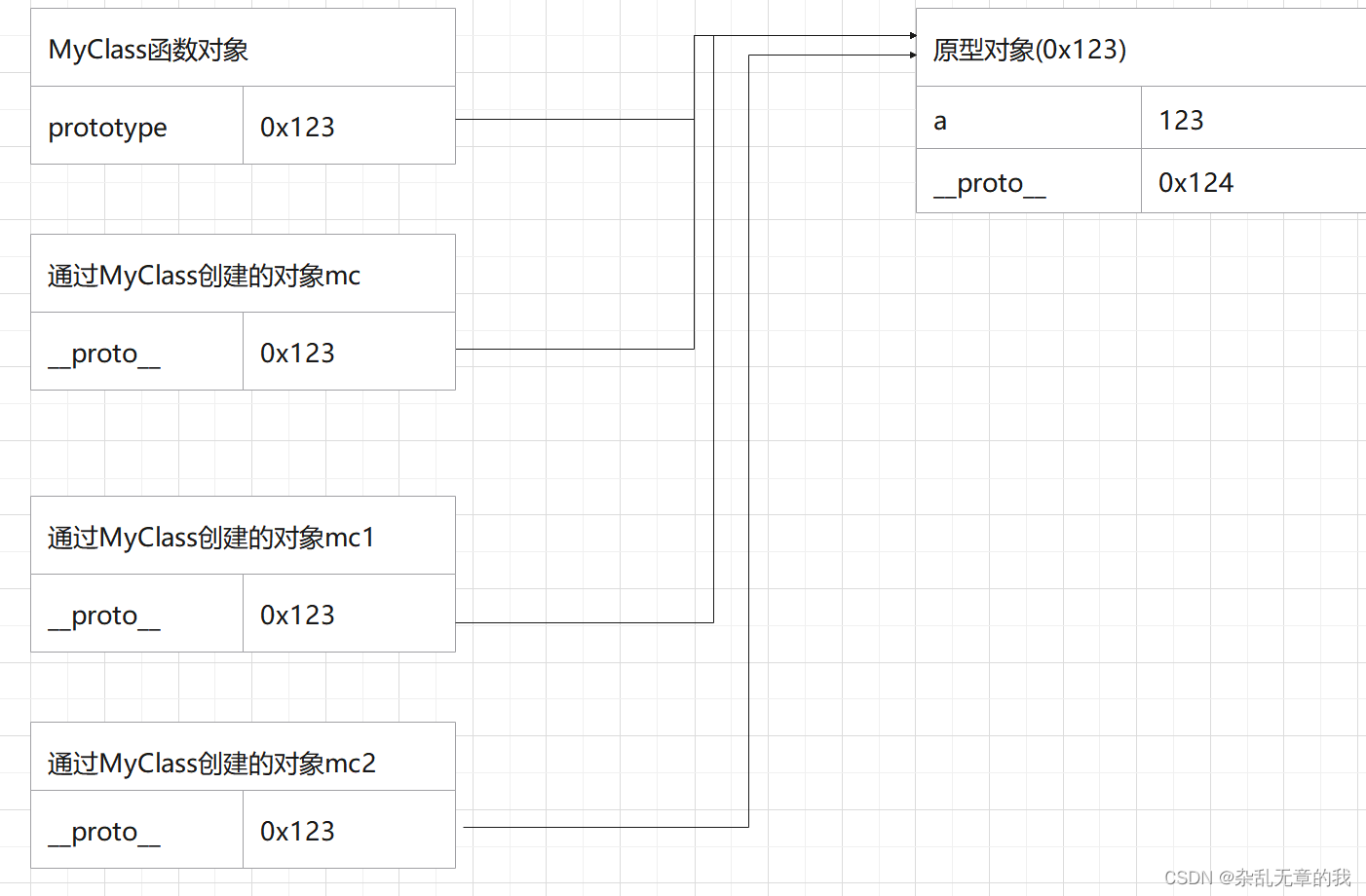
js中的this指向与原型对象

小米手机短信定位服务激活失败
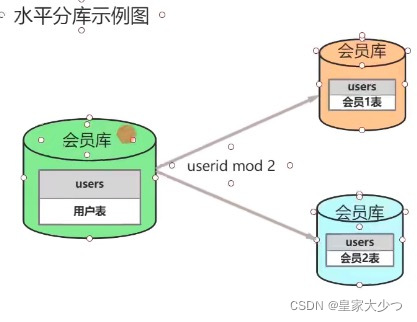
How MySQL - depots table?A look at will understand
This in js points to the prototype object

VS2017 connects to MYSQL
使用 OpenCV 提取图像的 HOG、SURF 及 LBP 特征 (含代码)
随机推荐
活体检测FaceBagNet阅读笔记
kotlin 插件更新到1.3.21
unicloud cloud development record
js中的全局作用域与函数作用域
function in js
活体检测CDCN学习笔记
WeChat applet source code acquisition and decompilation method
ERROR Error: No module factory availabl at Object.PROJECT_CONFIG_JSON_NOT_VALID_OR_NOT_EXIST ‘Error
Jupyter内核正忙、内核挂掉
Powershell中UTF-8环境中文乱码解决办法
mysql common commands
著名网站msdn.itellyou.cn原理分析
深度学习知识点杂谈
The browser looks for events bound or listened to by js
qt:cannot open C:\Users\某某某\AppData\Local\Temp\main.obj.15576.16.jom for write
MYSQL transaction and lock problem handling
Navicat从本地文件中导入sql文件
softmax函数详解
Multi-Modal Face Anti-Spoofing Based on Central Difference Networks学习笔记
this points to the problem