当前位置:网站首页>Raspberry pie 4B deploy yolov5 Lite using ncnn
Raspberry pie 4B deploy yolov5 Lite using ncnn
2022-07-28 20:31:00 【Effort & struggle】
Catalog
One 、 Raspberry pie configuration NCNN
Two 、Yolov5-lite model training
2. Install the required package
3. Train your own dataset (YOLO Format )
3、 ... and 、 Raspberry pie deployment lite Model
1. take onnx The model is converted to ncnn
Four 、 The final operation effect
Preface
Record the process , Convenient for next use
One 、 Raspberry pie configuration NCNN
1. Installation dependency
sudo apt-get install git cmake
sudo apt-get install -y gfortran
sudo apt-get install -y libprotobuf-dev libleveldb-dev libsnappy-dev libopencv-dev libhdf5-serial-dev protobuf-compiler
sudo apt-get install --no-install-recommends libboost-all-dev
sudo apt-get install -y libgflags-dev libgoogle-glog-dev liblmdb-dev libatlas-base-dev
2. download NCNN And compile
$ git clone https://gitee.com/Tencent/ncnn.git
cd ncnn
mkdir build
cd build
cmake ..
make -j4
make install
After completion ncnn The folder is as follows

Two 、Yolov5-lite model training
1. Source code address
https://gitee.com/seaflyren/YOLOv5-Lite
The downloaded file is shown in the figure

2. Install the required package
pip install -r requirements.txt
3. Train your own dataset (YOLO Format )
data New under folder mydata.yaml, Copy coco.yaml Content and paste
Modify the number of categories according to your own dataset nc And class names classname And the path of training set and verification set
Modify the model yaml In the document nc Count , and mydata.yaml bring into correspondence with

4. model training
With lite-e For example , Open the terminal and input the command
python train.py --weights ' Pre training weight path /v5lite-e.pt' --data 'data/mydata.yaml' --cfg 'models/v5lite-e.yaml' --epoch 300 --batch-size 16 --adam
5. Model transformation
python export.py --weights 'weights/last.pt' --batch-size 1 --img_size 320
6.onnx Model simplification
Use onnx-simplifier For the converted onnx Simplify
pip install onnxsimplifier
python -m onnxsim last.onnx e.onnx3、 ... and 、 Raspberry pie deployment lite Model
1. take onnx The model is converted to ncnn
cd ncnn/build
./tools/onnx/onnx2ncnn e.onnx e.param e.bin
# The model is optimized to fp16
./tools/onnxoptimize e.param e.bin eopt.param eopt.bin 65536
2. add to Yolov5-lite.cpp
cd ncnn/examples
touch yolov5_lite.cppCopy the following code to cpp In file
// Tencent is pleased to support the open source community by making ncnn available.
//
// Copyright (C) 2020 THL A29 Limited, a Tencent company. All rights reserved.
//
// Licensed under the BSD 3-Clause License (the "License"); you may not use this file except
// in compliance with the License. You may obtain a copy of the License at
//
// https://opensource.org/licenses/BSD-3-Clause
//
// Unless required by applicable law or agreed to in writing, software distributed
// under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR
// CONDITIONS OF ANY KIND, either express or implied. See the License for the
// specific language governing permissions and limitations under the License.
#include "layer.h"
#include "net.h"
#if defined(USE_NCNN_SIMPLEOCV)
#include "simpleocv.h"
#else
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#endif
#include <float.h>
#include <stdio.h>
#include <vector>
#include <sys/time.h>
// 0 : FP16
// 1 : INT8
#define USE_INT8 0
// 0 : Image
// 1 : Camera
#define USE_CAMERA 1
struct Object
{
cv::Rect_<float> rect;
int label;
float prob;
};
static inline float intersection_area(const Object& a, const Object& b)
{
cv::Rect_<float> inter = a.rect & b.rect;
return inter.area();
}
static void qsort_descent_inplace(std::vector<Object>& faceobjects, int left, int right)
{
int i = left;
int j = right;
float p = faceobjects[(left + right) / 2].prob;
while (i <= j)
{
while (faceobjects[i].prob > p)
i++;
while (faceobjects[j].prob < p)
j--;
if (i <= j)
{
// swap
std::swap(faceobjects[i], faceobjects[j]);
i++;
j--;
}
}
#pragma omp parallel sections
{
#pragma omp section
{
if (left < j) qsort_descent_inplace(faceobjects, left, j);
}
#pragma omp section
{
if (i < right) qsort_descent_inplace(faceobjects, i, right);
}
}
}
static void qsort_descent_inplace(std::vector<Object>& faceobjects)
{
if (faceobjects.empty())
return;
qsort_descent_inplace(faceobjects, 0, faceobjects.size() - 1);
}
static void nms_sorted_bboxes(const std::vector<Object>& faceobjects, std::vector<int>& picked, float nms_threshold)
{
picked.clear();
const int n = faceobjects.size();
std::vector<float> areas(n);
for (int i = 0; i < n; i++)
{
areas[i] = faceobjects[i].rect.area();
}
for (int i = 0; i < n; i++)
{
const Object& a = faceobjects[i];
int keep = 1;
for (int j = 0; j < (int)picked.size(); j++)
{
const Object& b = faceobjects[picked[j]];
// intersection over union
float inter_area = intersection_area(a, b);
float union_area = areas[i] + areas[picked[j]] - inter_area;
// float IoU = inter_area / union_area
if (inter_area / union_area > nms_threshold)
keep = 0;
}
if (keep)
picked.push_back(i);
}
}
static inline float sigmoid(float x)
{
return static_cast<float>(1.f / (1.f + exp(-x)));
}
// unsigmoid
static inline float unsigmoid(float y) {
return static_cast<float>(-1.0 * (log((1.0 / y) - 1.0)));
}
static void generate_proposals(const ncnn::Mat &anchors, int stride, const ncnn::Mat &in_pad,
const ncnn::Mat &feat_blob, float prob_threshold,
std::vector <Object> &objects) {
const int num_grid = feat_blob.h;
float unsig_pro = 0;
if (prob_threshold > 0.6)
unsig_pro = unsigmoid(prob_threshold);
int num_grid_x;
int num_grid_y;
if (in_pad.w > in_pad.h) {
num_grid_x = in_pad.w / stride;
num_grid_y = num_grid / num_grid_x;
} else {
num_grid_y = in_pad.h / stride;
num_grid_x = num_grid / num_grid_y;
}
const int num_class = feat_blob.w - 5;
const int num_anchors = anchors.w / 2;
for (int q = 0; q < num_anchors; q++) {
const float anchor_w = anchors[q * 2];
const float anchor_h = anchors[q * 2 + 1];
const ncnn::Mat feat = feat_blob.channel(q);
for (int i = 0; i < num_grid_y; i++) {
for (int j = 0; j < num_grid_x; j++) {
const float *featptr = feat.row(i * num_grid_x + j);
// find class index with max class score
int class_index = 0;
float class_score = -FLT_MAX;
float box_score = featptr[4];
if (prob_threshold > 0.6) {
// while prob_threshold > 0.6, unsigmoid better than sigmoid
if (box_score > unsig_pro) {
for (int k = 0; k < num_class; k++) {
float score = featptr[5 + k];
if (score > class_score) {
class_index = k;
class_score = score;
}
}
float confidence = sigmoid(box_score) * sigmoid(class_score);
if (confidence >= prob_threshold) {
float dx = sigmoid(featptr[0]);
float dy = sigmoid(featptr[1]);
float dw = sigmoid(featptr[2]);
float dh = sigmoid(featptr[3]);
float pb_cx = (dx * 2.f - 0.5f + j) * stride;
float pb_cy = (dy * 2.f - 0.5f + i) * stride;
float pb_w = pow(dw * 2.f, 2) * anchor_w;
float pb_h = pow(dh * 2.f, 2) * anchor_h;
float x0 = pb_cx - pb_w * 0.5f;
float y0 = pb_cy - pb_h * 0.5f;
float x1 = pb_cx + pb_w * 0.5f;
float y1 = pb_cy + pb_h * 0.5f;
Object obj;
obj.rect.x = x0;
obj.rect.y = y0;
obj.rect.width = x1 - x0;
obj.rect.height = y1 - y0;
obj.label = class_index;
obj.prob = confidence;
objects.push_back(obj);
}
} else {
for (int k = 0; k < num_class; k++) {
float score = featptr[5 + k];
if (score > class_score) {
class_index = k;
class_score = score;
}
}
float confidence = sigmoid(box_score) * sigmoid(class_score);
if (confidence >= prob_threshold) {
float dx = sigmoid(featptr[0]);
float dy = sigmoid(featptr[1]);
float dw = sigmoid(featptr[2]);
float dh = sigmoid(featptr[3]);
float pb_cx = (dx * 2.f - 0.5f + j) * stride;
float pb_cy = (dy * 2.f - 0.5f + i) * stride;
float pb_w = pow(dw * 2.f, 2) * anchor_w;
float pb_h = pow(dh * 2.f, 2) * anchor_h;
float x0 = pb_cx - pb_w * 0.5f;
float y0 = pb_cy - pb_h * 0.5f;
float x1 = pb_cx + pb_w * 0.5f;
float y1 = pb_cy + pb_h * 0.5f;
Object obj;
obj.rect.x = x0;
obj.rect.y = y0;
obj.rect.width = x1 - x0;
obj.rect.height = y1 - y0;
obj.label = class_index;
obj.prob = confidence;
objects.push_back(obj);
}
}
}
}
}
}
}
static int detect_yolov5(const cv::Mat& bgr, std::vector<Object>& objects)
{
ncnn::Net yolov5;
#if USE_INT8
yolov5.opt.use_int8_inference=true;
#else
yolov5.opt.use_vulkan_compute = true;
yolov5.opt.use_bf16_storage = true;
#endif
// original pretrained model from https://github.com/ultralytics/yolov5
// the ncnn model https://github.com/nihui/ncnn-assets/tree/master/models
#if USE_INT8
yolov5.load_param("/home/corvin/Mask/weights/e.param");
yolov5.load_model("/home/corvin/Mask/weights/e.bin");
#else
yolov5.load_param("/home/corvin/Mask/weights/eopt.param");
yolov5.load_model("/home/corvin/Mask/weights/eopt.bin");
#endif
const int target_size = 320;
const float prob_threshold = 0.60f;
const float nms_threshold = 0.60f;
int img_w = bgr.cols;
int img_h = bgr.rows;
// letterbox pad to multiple of 32
int w = img_w;
int h = img_h;
float scale = 1.f;
if (w > h)
{
scale = (float)target_size / w;
w = target_size;
h = h * scale;
}
else
{
scale = (float)target_size / h;
h = target_size;
w = w * scale;
}
ncnn::Mat in = ncnn::Mat::from_pixels_resize(bgr.data, ncnn::Mat::PIXEL_BGR2RGB, img_w, img_h, w, h);
// pad to target_size rectangle
// yolov5/utils/datasets.py letterbox
int wpad = (w + 31) / 32 * 32 - w;
int hpad = (h + 31) / 32 * 32 - h;
ncnn::Mat in_pad;
ncnn::copy_make_border(in, in_pad, hpad / 2, hpad - hpad / 2, wpad / 2, wpad - wpad / 2, ncnn::BORDER_CONSTANT, 114.f);
const float norm_vals[3] = {1 / 255.f, 1 / 255.f, 1 / 255.f};
in_pad.substract_mean_normalize(0, norm_vals);
ncnn::Extractor ex = yolov5.create_extractor();
ex.input("images", in_pad);
std::vector<Object> proposals;
// stride 8
{
ncnn::Mat out;
ex.extract("451", out);
ncnn::Mat anchors(6);
anchors[0] = 10.f;
anchors[1] = 13.f;
anchors[2] = 16.f;
anchors[3] = 30.f;
anchors[4] = 33.f;
anchors[5] = 23.f;
std::vector<Object> objects8;
generate_proposals(anchors, 8, in_pad, out, prob_threshold, objects8);
proposals.insert(proposals.end(), objects8.begin(), objects8.end());
}
// stride 16
{
ncnn::Mat out;
ex.extract("479", out);
ncnn::Mat anchors(6);
anchors[0] = 30.f;
anchors[1] = 61.f;
anchors[2] = 62.f;
anchors[3] = 45.f;
anchors[4] = 59.f;
anchors[5] = 119.f;
std::vector<Object> objects16;
generate_proposals(anchors, 16, in_pad, out, prob_threshold, objects16);
proposals.insert(proposals.end(), objects16.begin(), objects16.end());
}
// stride 32
{
ncnn::Mat out;
ex.extract("507", out);
ncnn::Mat anchors(6);
anchors[0] = 116.f;
anchors[1] = 90.f;
anchors[2] = 156.f;
anchors[3] = 198.f;
anchors[4] = 373.f;
anchors[5] = 326.f;
std::vector<Object> objects32;
generate_proposals(anchors, 32, in_pad, out, prob_threshold, objects32);
proposals.insert(proposals.end(), objects32.begin(), objects32.end());
}
// sort all proposals by score from highest to lowest
qsort_descent_inplace(proposals);
// apply nms with nms_threshold
std::vector<int> picked;
nms_sorted_bboxes(proposals, picked, nms_threshold);
int count = picked.size();
objects.resize(count);
for (int i = 0; i < count; i++)
{
objects[i] = proposals[picked[i]];
// adjust offset to original unpadded
float x0 = (objects[i].rect.x - (wpad / 2)) / scale;
float y0 = (objects[i].rect.y - (hpad / 2)) / scale;
float x1 = (objects[i].rect.x + objects[i].rect.width - (wpad / 2)) / scale;
float y1 = (objects[i].rect.y + objects[i].rect.height - (hpad / 2)) / scale;
// clip
x0 = std::max(std::min(x0, (float)(img_w - 1)), 0.f);
y0 = std::max(std::min(y0, (float)(img_h - 1)), 0.f);
x1 = std::max(std::min(x1, (float)(img_w - 1)), 0.f);
y1 = std::max(std::min(y1, (float)(img_h - 1)), 0.f);
objects[i].rect.x = x0;
objects[i].rect.y = y0;
objects[i].rect.width = x1 - x0;
objects[i].rect.height = y1 - y0;
}
return 0;
}
static void draw_objects(const cv::Mat& bgr, const std::vector<Object>& objects)
{
static const char* class_names[] = {
"face","face_mask"
};
cv::Mat image = bgr.clone();
for (size_t i = 0; i < objects.size(); i++)
{
const Object& obj = objects[i];
fprintf(stderr, "%d = %.5f at %.2f %.2f %.2f x %.2f\n", obj.label, obj.prob,
obj.rect.x, obj.rect.y, obj.rect.width, obj.rect.height);
cv::rectangle(image, obj.rect, cv::Scalar(0, 255, 0));
char text[256];
sprintf(text, "%s %.1f%%", class_names[obj.label], obj.prob * 100);
int baseLine = 0;
cv::Size label_size = cv::getTextSize(text, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
int x = obj.rect.x;
int y = obj.rect.y - label_size.height - baseLine;
if (y < 0)
y = 0;
if (x + label_size.width > image.cols)
x = image.cols - label_size.width;
cv::rectangle(image, cv::Rect(cv::Point(x, y), cv::Size(label_size.width, label_size.height + baseLine)),
cv::Scalar(255, 255, 255), -1);
cv::putText(image, text, cv::Point(x, y + label_size.height),
cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0));
}
#if USE_CAMERA
imshow("camera", image);
cv::waitKey(1);
#else
cv::imwrite("result.jpg", image);
#endif
}
#if USE_CAMERA
int main(int argc, char** argv)
{
cv::VideoCapture capture;
capture.open(0); // Modify this parameter to select the camera you want to use
cv::Mat frame;
while (true)
{
capture >> frame;
cv::Mat m = frame;
std::vector<Object> objects;
detect_yolov5(frame, objects);
draw_objects(m, objects);
if (cv::waitKey(30) >= 0)
break;
}
}
#else
int main(int argc, char** argv)
{
if (argc != 2)
{
fprintf(stderr, "Usage: %s [imagepath]\n", argv[0]);
return -1;
}
const char* imagepath = argv[1];
struct timespec begin, end;
long time;
clock_gettime(CLOCK_MONOTONIC, &begin);
cv::Mat m = cv::imread(imagepath, 1);
if (m.empty())
{
fprintf(stderr, "cv::imread %s failed\n", imagepath);
return -1;
}
std::vector<Object> objects;
detect_yolov5(m, objects);
clock_gettime(CLOCK_MONOTONIC, &end);
time = (end.tv_sec - begin.tv_sec) + (end.tv_nsec - begin.tv_nsec);
printf(">> Time : %lf ms\n", (double)time/1000000);
draw_objects(m, objects);
return 0;
}
#endif
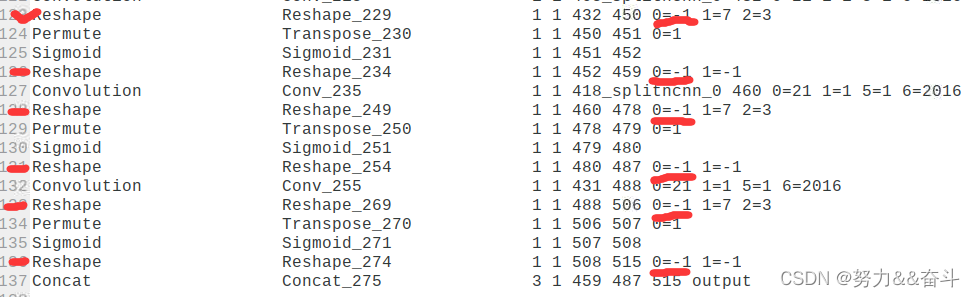
3. modify eopt.param
bug1:Squeeze not supported yet!
Generate param If you encounter Squeeze not supported yet! Etc , The solution is to use onnxsimplifier Optimize onnx The model is being converted to param
open eopt.param, Will all Reshape It is amended as follows 0=-1, This step is to enable dynamic input
4. modify yolov5_lite.cpp
bug2:Segmentation Fault
This is because it has not been modified cpp in ex.extract() and permute bring into correspondence with
open v5lite-e.yaml

according to anchors modify cpp Content , Need to be consistent


open eopt.param, according to permute modify cpp file




5. modify CMakeLists.txt
open examples/CMakeLists.txt , add to ncnn_add_example(yolov5_lite) , Pay attention to the consistency with the file name

Use... When finished cmake compile
cd ncnn/build
cmake ..
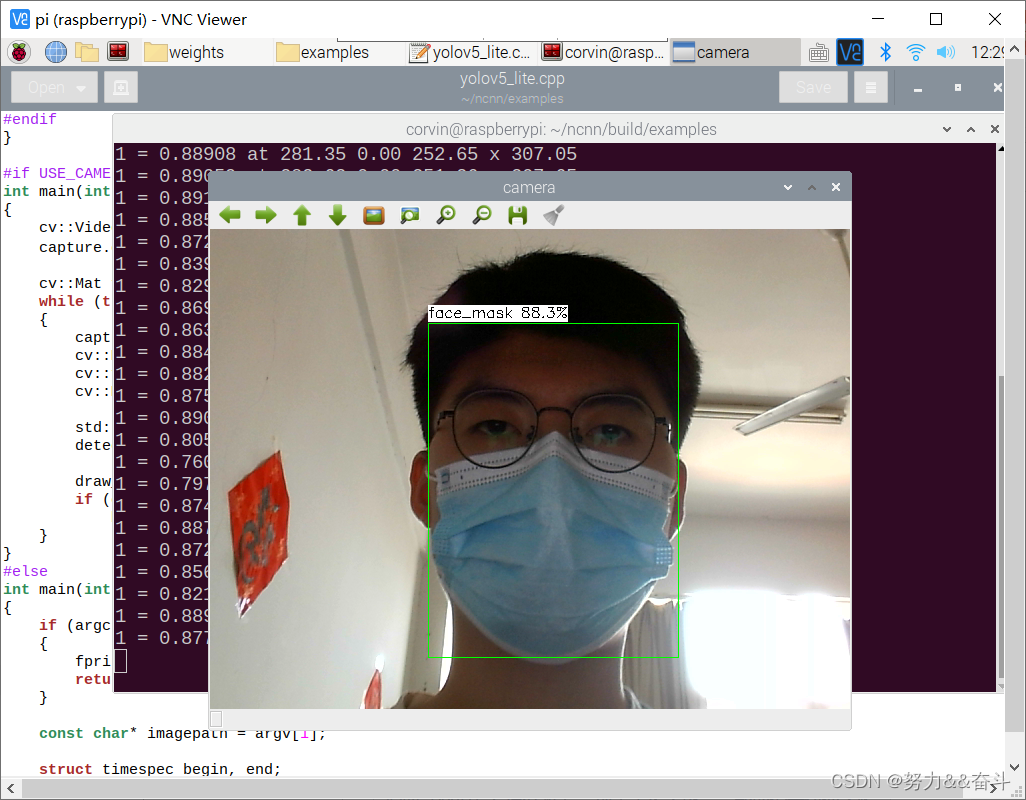
makeFour 、 The final operation effect
summary
yolov5_lite After deployment , Raspberry pie recognition is still very smooth
边栏推荐
猜你喜欢

Array out of bounds
![[pytorch] LSTM neural network](/img/c8/c1f92e7d4da7f07b85abe481f025bc.png)
[pytorch] LSTM neural network

One article makes you understand what typescript is

跨区域网络的通信学习静态路由

Usage Summary of thymeleaf

Durham High Lord (classic DP)
关于链接到其他页面的标题

Multi-Modal Knowledge Graph Construction and Application: A Survey

Who cares about the safety of the battery when it ignites in a collision? SAIC GM has something to say

CNN convolution neural network learning process (weight update)

随机推荐
Solve flask integration_ Error reporting in restplus
C language - question brushing column
Solve the cookie splitting problem (DP)
Raspberry connects EC20 for PPP dialing
Raspberry pie 3b ffmpeg RTMP streaming
7. Functions of C language, function definitions and the order of function calls, how to declare functions, prime examples, formal parameters and arguments, and how to write a function well
DOS common commands
2. Floating point number, the difference between float and double in C language and how to choose them
LVS deployment Dr cluster
[experiment sharing] CCIE BGP reflector experiment
9. Pointer of C language (1) what is pointer and how to define pointer variables
Scheduled backup of MySQL database under Windows system
local/chain/run_ tdnn.sh:
Vivado designs PC and ram
9. Pointer of C language (5) how many bytes does the pointer variable occupy
C语言简单实例 1
Common instructions of vim software
WFST decoding process
plt. What does it mean when linestyle, marker, color equals none in plot()
[C language] guessing numbers game