当前位置:网站首页>[flower carving experience] 14 line blank board pingpong library test external sensor module (one)
[flower carving experience] 14 line blank board pingpong library test external sensor module (one)
2022-06-30 07:59:00 【Lvyou flower carving】
1、pinpong Library is a set of software that controls the main control board of open source hardware Python library , be based on Firmata Protocol and compatibility MicroPython grammar ,5 You can use it in minutes Python Control open source hardware . With the help of pinpong library , Direct use Python Code can be used to program various common open source hardware . The principle is to burn a specific firmware for open source hardware , So that the open source hardware can communicate with the computer through the serial port , Carry out various orders .
pinpong The name of the library is given by “Pin” and “Pong” form ,“Pin” Guide foot ,“PinPong” by “ Table Tennis ” Homophony of , Refers to the reciprocation of signals .pinpong The design of the library , It is to let developers not be bound by complex hardware models in the development process , And shift the focus to the implementation of software . Even if it is used in the initial stage of programming Arduino Development , It is changed to the control board during deployment , As long as you modify the parameters of the hardware, you can run normally , Realized “ Write once and run everywhere ”.

2、pinpong Library import method
pinpong The library supports many mainboards and open source hardware , So it is divided into 3 A package ,board、extension and libs,board The package contains functions supported by the motherboard and common libraries ,extension It is a custom class master ,libs An extended library for placing other sensors in .pinpong The library supports the use of multiple master boards , Therefore, you can specify the board type and port number and generate objects , Because the line blank board is fixed as a coprocessor and the port number is fixed , Therefore, you can omit these parameters and initialize directly .
from pinpong.board import xxx #board Libraries in packages
from pinpong.libs.xxx #libs Libraries in packages
from pinpong.extension.xxx #extension The motherboard in the package
Board().begin() # initialization , Connect coprocessor , If the firmware is empty or the version is incorrect, it will be automatically burned

3、 Experimental hardware

4、9G The steering gear
It's a position ( angle ) Servo driver , It is suitable for those control systems that need to change and maintain the angle . The steering gear is mainly composed of a shell 、 Circuit board 、 Coreless motor 、 Gear and position detector . Its working principle is that the receiver or single chip microcomputer sends a signal to the steering gear , There is a reference circuit inside , The production period is 20ms, Width is 1.5ms The reference signal of , The obtained DC bias voltage is compared with the voltage of the potentiometer , Get voltage difference output . Via... On the circuit board IC Judge the direction of rotation , Then drive the coreless motor to start rotating , The power is transmitted to the swing arm through the reduction gear , At the same time, the signal is sent back by the position detector , Determine whether the location has been reached . It is suitable for those control systems that need to change and maintain the angle . When the motor speed is fixed , The potentiometer is driven to rotate by the cascade reduction gear , Make the voltage difference 0, The motor stops turning . Generally, the rotation angle range of the steering gear is 0 C to 180 degree .

PWM Relationship between signal and steering gear rotation angle
Speaking of the steering gear control signal , Generally, it is pulse width modulation (PWM) The signal , Here's the picture , It's a direct reflection of PWM Relationship between signal and steering gear rotation angle , You can also simply understand it as , Time control by energizing the steering gear , Combined with the feedback signal detection and control of the angle sensor , The precise angle control of the steering gear is realized . The control signal period of the steering gear is 20MS Pulse width modulation signal (PWM), The pulse width ranges from 0.5ms-2.5ms, The corresponding rudder position is from 0-180 degree , Change linearly . in other words , Provide certain pulse width for the steering gear , His output shaft will maintain a certain corresponding angle , No matter how the external torque changes , Know to give him another pulse signal , The output will change to the new position . There is a reference circuit inside the steering gear , The production period is 20MS, Width is 1.5MS Pulse signal of , There is a comparator , Compare the applied signal with the reference signal , Determine the direction and size , Thus, the rotation signal of the motor is generated . The steering gear is a position servo driver , The rotation range cannot exceed 180 degree , For drives that need to be constantly changing and can be maintained , Metaphorically speaking, robot joints 、 The rudder of an aircraft, etc .


【 Flower carving experience 】14 Empty board pinpong Library test external sensor module ( One of )
The line blank board tests the external sensor module ——Mind+ Code programming
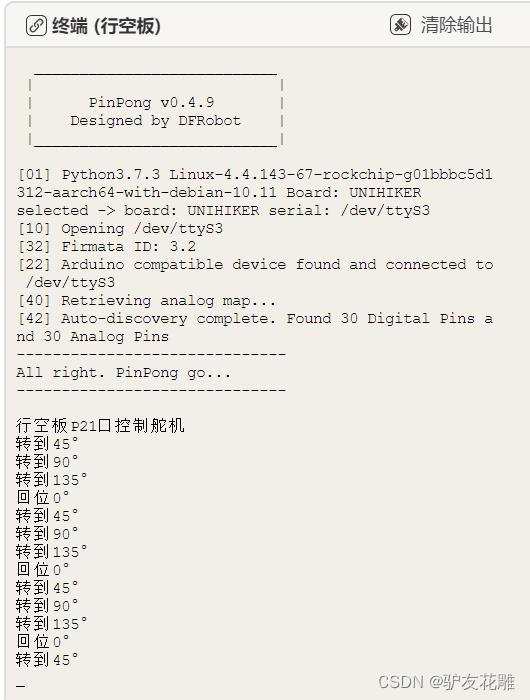
Test procedure XXI : Empty board P21 Mouth control steering gear
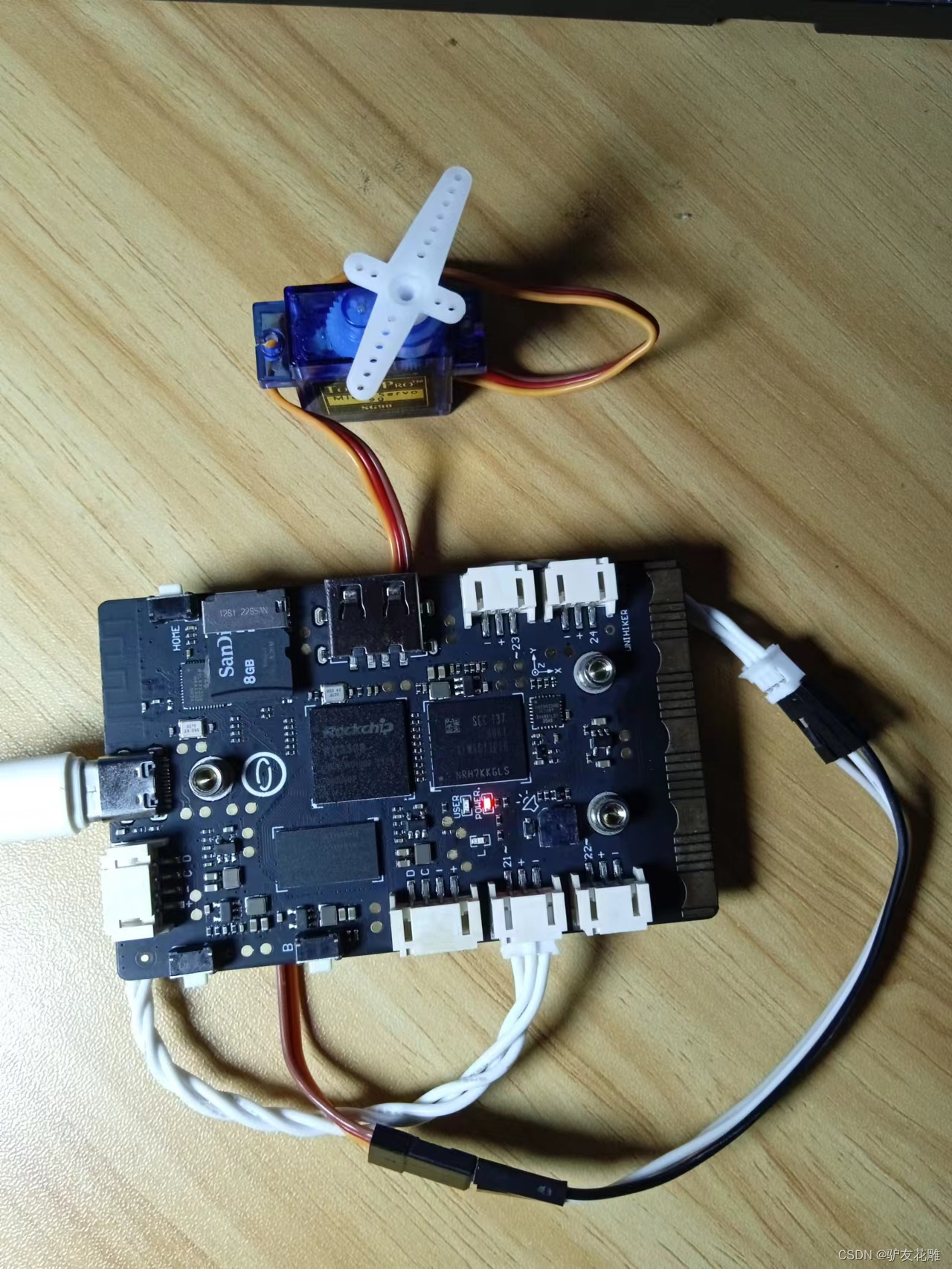
Experimental wiring : Empty board P21 Mouth to mouth 9G Steering gear module
#【 Flower carving experience 】14 Empty board pinpong Library test external sensor module ( One of )
# The line blank board tests the external sensor module ——Mind+ Code programming
# Test procedure XXI : Empty board P21 Mouth control steering gear
# Experimental wiring : Empty board P21 Mouth to mouth 9G Steering gear module
from pinpong.extension.unihiker import *
from pinpong.board import Board,Pin
from pinpong.board import Servo
import time
Board().begin()
servo1 = Servo(Pin((Pin.P21)))
while True:
servo1.write_angle(45)
time.sleep(2)
servo1.write_angle(90)
time.sleep(2)
servo1.write_angle(180)
time.sleep(2)
servo1.write_angle(0)
time.sleep(2)
Experimental test video (29 second )
https://v.youku.com/v_show/id_XNTg4MTgyMDg0OA==.html
【 Flower carving experience 】14 Empty board pinpong Library test external sensor module ( One of )
The line blank board tests the external sensor module ——Mind+ Graphic programming
Test procedure XXII : Empty board P21 Mouth control steering gear
Experimental wiring : Empty board P21 Mouth to mouth 9G Steering gear module

Experimental serial port return
Experimental scene
5、DHT11 Temperature and humidity sensor
DHT11 It is a temperature and humidity composite sensor with calibrated digital signal output . It uses special digital module acquisition technology and temperature and humidity sensing technology , Ensure high reliability and excellent long-term stability . The sensor consists of a resistive humidity sensor and a NTC Temperature measuring element , And with a high performance 8 Bit single chip microcomputer connected . So this product has excellent quality 、 Super quick response 、 Strong anti-interference ability 、 High cost performance advantages . Every DHT11 Sensors are calibrated in a very accurate humidity calibration room . The calibration coefficients are stored in the form of a program OTP In the memory , These calibration coefficients are called in the process of signal processing inside the sensor . Single line serial interface , Make system integration easy and fast . Super small size 、 Very low power consumption , The signal transmission distance can reach 20 Meters above , Make it the best choice for all kinds of applications and even the most demanding applications . Products for 4 Single row pin package . Easy to connect , Special packaging forms can be provided according to user needs .

Module description
(1) It can detect the humidity and temperature of the surrounding environment
(2) The sensor uses DHT11
(3) Humidity measurement range :20%-95%(0 degree -50 Degree range ) Humidity measurement error :±5%
(4) Temperature measurement range :0 degree -50 degree Temperature measurement error :±2 degree
(5) Working voltage 3.3V-5V
(6) Output form Digital output
(7) There are fixing bolt holes , Easy to install
(8) Microplate PCB Size :3.2cm*1.4cm
(9) Power indicator ( Red )
(10) Each set weighs about 8g

【 Flower carving experience 】14 Empty board pinpong Library test external sensor module ( One of )
The line blank board tests the external sensor module ——Mind+ Code programming
Test procedure XXIII : Empty board P21 Mouth reading DHT11 Temperature and humidity sensor value
Experimental wiring : Empty board P21 Mouth to mouth DHT11 Temperature and humidity sensor module
#【 Flower carving experience 】14 Empty board pinpong Library test external sensor module ( One of )
# The line blank board tests the external sensor module ——Mind+ Code programming
# Test procedure XXIII : Empty board P21 Mouth reading DHT11 Temperature and humidity sensor value
# Experimental wiring : Empty board P21 Mouth to mouth DHT11 Temperature and humidity sensor module
from pinpong.extension.unihiker import *
from pinpong.board import Board,Pin
from pinpong.board import DHT11
import time
Board().begin()
print(" Empty board P21 Mouth reading DHT11 Temperature and humidity sensor value ")
DHT11 = DHT11(Pin((Pin.P21)))
while True:
print(" temperature =")
print(DHT11.temp_c())
print(" humidity =")
print(DHT11.humidity())
time.sleep(1)
Experimental serial port return

【 Flower carving experience 】14 Empty board pinpong Library test external sensor module ( One of )
The line blank board tests the external sensor module ——Mind+ Graphic programming
Test procedure XXIV : Empty board P21 Mouth reading DHT11 Value and control LED
Experimental wiring : Empty board P21 Mouth to mouth DHT11 Temperature and humidity sensor module
Empty board P22 Mouth to mouth LED modular

Experimental serial port return

Experimental scene

( To be continued )
边栏推荐
- Introduction notes to pytorch deep learning (11) neural network pooling layer
- Deep learning vocabulary representation
- 2021-10-29 [microbiology] a complete set of 16s/its analysis process based on qiime2 tool (Part I)
- Final review -php learning notes 5-php array
- January 23, 2022 [reading notes] - bioinformatics and functional genomics (Chapter 6: multiple sequence alignment)
- 深度学习——Bounding Box预测
- At the age of 25, I started to work in the Tiankeng industry with buckets. After going through a lot of hardships to become a programmer, my spring finally came
- Xiashuo think tank: 42 reports on planet update today (including 23 planning cases)
- Is it difficult to jump job ByteDance? With these skills, you can easily pass
- Miracle Mu server rental selection is real and easy to use, stable and intrusion proof
猜你喜欢

【花雕体验】13 搭建ESP32C3之PlatformIO IDE开发环境

Introduction notes to pytorch deep learning (XII) neural network - nonlinear activation

Halcon12+vs2013 C # configuration

Deep learning -- sequence model and mathematical symbols

2022 Research Report on China's intelligent fiscal and tax Market: accurate positioning, integration and diversity

期末复习-PHP学习笔记3-PHP流程控制语句
![November 19, 2021 [reading notes] a summary of common problems of sneakemake (Part 2)](/img/f8/ca1874eb999dc2bbb3c1392d0b72bc.jpg)
November 19, 2021 [reading notes] a summary of common problems of sneakemake (Part 2)
![January 23, 2022 [reading notes] - bioinformatics and functional genomics (Chapter 6: multiple sequence alignment)](/img/48/cfe6ab95b4d4660e3ac3d84ae5303b.jpg)
January 23, 2022 [reading notes] - bioinformatics and functional genomics (Chapter 6: multiple sequence alignment)

期末複習-PHP學習筆記5-PHP數組

跳槽字节跳动很难嘛?掌握这些技巧,你也能轻松通过
随机推荐
期末复习-PHP学习笔记5-PHP数组
全栈最全性能测试理论-总结
冰冰学习笔记:快速排序
JS代码案例
你了解IP协议吗?
小程序使用二维码插件
Recurrence relation (difference equation) -- Hanoi problem
Inversion Lemma
mysql无法连接内网的数据库
Final review -php learning notes 2-php language foundation
Solve the linear equation of a specified point and a specified direction
Deep learning - networks in networks and 1x1 convolution
Bingbing learning notes: quick sorting
December 4, 2021 - Introduction to macro genome analysis process tools
November 16, 2021 [reading notes] - macro genome analysis process
CRM&PM如何帮助企业创造最优销售绩效
Full stack performance testing theory - Summary
Deep learning -- recurrent neural network
The counting tool of combinatorial mathematics -- generating function
Examen final - notes d'apprentissage PHP 3 - Déclaration de contrôle du processus PHP