当前位置:网站首页>Principle, composition and functions of sensors of Dajiang UAV flight control system
Principle, composition and functions of sensors of Dajiang UAV flight control system
2022-06-13 03:55:00 【Bear coder】
Edited from : https://blog.csdn.net/weixin_42229404/article/details/81318779
before , To make Unmanned aerial vehicle (uav) Eight of the ten people in the group are airlines 、 Pneumatic 、 Mechanical background , More consideration is given to how to make the aircraft fly stably 、 Fly faster 、 Fly higher . Now , With the chip 、 Artificial intelligence 、 big data Technological development , UAV has begun to be intelligent 、 Termination 、 The trend of clustering , Mass automation 、 Mechatronics 、 Information engineering 、 Microelectronics professionals have been involved in the research and development of UAVs , In a few years, UAVs have flown into the homes of ordinary people from military applications far away from people's vision 、 So that laymen can learn for a short time and have stable and reliable flight entertainment . Undeniable? , The development of flight control technology is the biggest driver of UAV changes in the past decade .

What is flight control ?
Flight control system (Flight control system) Flight control for short , It can be seen as the brain of an aircraft . Flight of multi axis aircraft 、 hover , Posture changes and so on are all caused by a variety of sensor Send the attitude data of the aircraft back to the flight control , Then the flight control gives instructions through calculation and judgment , The action and flight attitude adjustment are completed by the actuator .
Control can be understood as UAV CPU System , It is the core component of UAV , Its main function is to send various instructions , And process the data returned by each component . Similar to the human brain , Send instructions to all parts of the body , And receive the information returned by each component , Issue new instructions after operation . for example , The brain directs the hand to get a glass of water , Touch the cup wall with your hand , Retract because the water is too hot , And send this information back to the brain , The brain will retransmit new instructions according to the actual situation .
Flight principle and control method of UAV ( Take the four rotor UAV as an example )
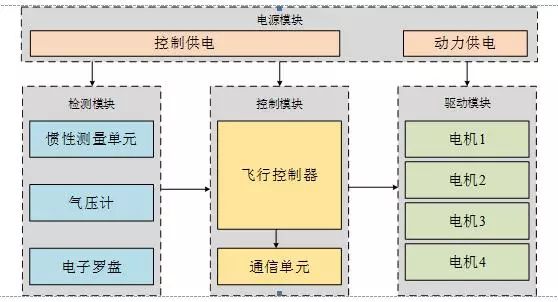
The four rotor UAV is generally composed of a detection module , Control module , Execution module and power supply module . The detection module measures the current attitude ; The execution module is to solve the current posture , Optimization control , And generate corresponding control quantity for the execution module ; The power supply module supplies power to the whole system .
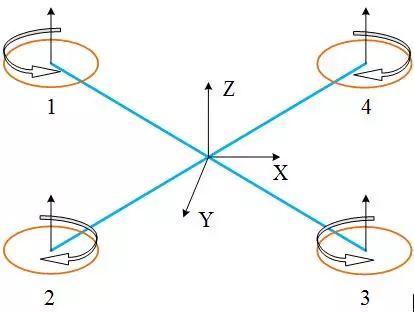
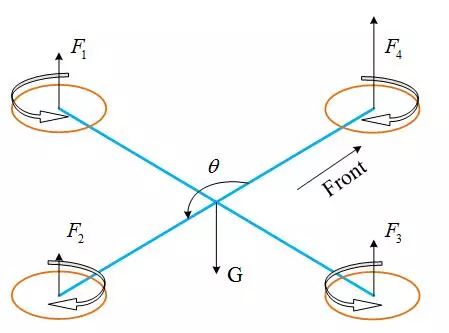
The fuselage of a four rotor UAV is composed of a symmetrical cross shaped rigid body structure , Most materials are light 、 High strength carbon fiber ; A rotor composed of two blades is installed at the four ends of the cross structure to provide flight power for the aircraft , Each rotor is mounted on a motor rotor , Control the rotation speed of each rotor by controlling the rotation state of the motor , To provide different lift forces to achieve various postures ; Each motor is connected with the motor driving part 、 The central control unit is connected , The speed is adjusted by the control signal provided by the central control unit ;IMU The inertial measurement unit provides the central control unit with the data of attitude calculation , The detection module on the fuselage provides the most direct data for the UAV to understand its position and posture , It provides a guarantee for the four rotor UAV to finally realize autonomous flight in complex environment .
Now the rotors located on the same diagonal of the four rotor fuselage are grouped into one group , The front and rear rotors rotate clockwise , This produces a clockwise torque ; The left and right rotors rotate counterclockwise , This produces a counterclockwise torque , In this way, the torque generated by the rotation of the four rotors can offset each other . Thus we can see that , All attitude and position control of the four rotor aircraft is realized by adjusting the speed of the four driving motors . Generally speaking , The motion state of a four rotor UAV is mainly divided into hovering 、 Vertical motion 、 Rolling motion 、 Pitching motion and yaw motion .
hover
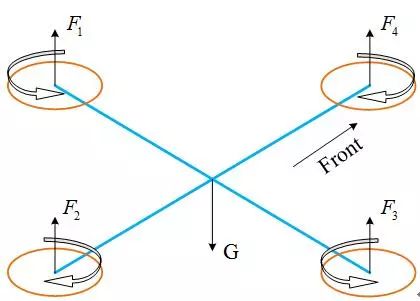
Hovering state is a remarkable characteristic of four rotor UAV . In hover , The four rotors have equal rotational speeds , The resultant lifting force is exactly equal to its own gravity , namely . And because the rotor speeds are equal , The rotation speed at the front and rear ends is opposite to that at the left and right ends , So that the total torque of the aircraft is zero , Keep the aircraft stationary in the air , Achieve hover status .
Vertical motion
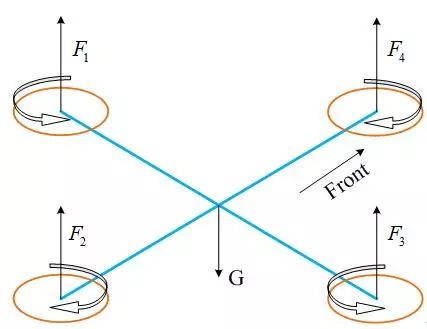
Vertical motion is the simplest of the five motion states , Under the condition that each rotating speed of the four rotor UAV is equal , At the same time, increase or decrease the speed of each rotor by the same amount , The vertical movement of the aircraft can be realized . When four rotor speeds are increased at the same time , When the total lift generated by the rotor exceeds the gravity of the four rotor UAV , namely , The four rotor UAV will rise vertically ; conversely , When the rotor speed is reduced at the same time , So that the total lift generated by each rotor is less than its own gravity , namely , The four rotor UAV will descend vertically , So as to realize the vertical lift control of the four rotor UAV .
Tumbling movement
The rolling motion is under the condition of keeping the front and rear rotor speeds of the four rotor UAV unchanged , By changing the rotor speed at the left and right ends , Make a certain lift difference between the left and right rotors , Thus, a certain moment is generated along the left and right symmetry axes of the aircraft body , Resulting in angular acceleration in the direction to achieve control . Pictured 2.3 Shown , Add rotor 1 Speed of , Reduce the rotor 3 Speed of , Then the aircraft tilts to the right ; contrary , Reduce the rotor 4, Add rotor 2, Then the aircraft tilts to the left .

Pitching motion
The pitching motion and rolling motion of a four rotor aircraft are similar , It is under the premise of keeping the rotor speed at the left and right ends of the fuselage unchanged , The lift difference between the front and rear rotors is formed by changing the speed of the front and rear rotors , Thus, a certain moment is formed on the symmetry axis of the front and rear ends of the fuselage , Causing angular acceleration in angular direction to realize control . Pictured 2.4 Shown , Add rotor 3 Speed of , Reduce the rotor 1 Speed of , Then the aircraft tilts forward ; conversely , Then the aircraft tilts backward .
Yaw motion
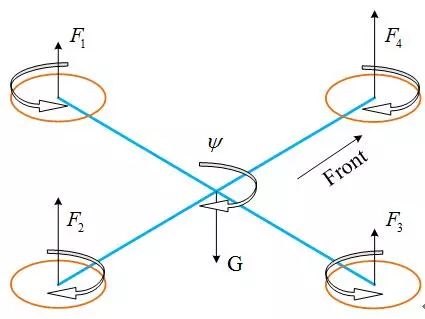
The deflection movement of the four rotors is controlled by controlling the rotating speeds of the four rotors simultaneously . Keep the rotor speed at the front and rear ends or left and right ends the same , No pitching or rolling motion will occur ; When the two rotors in each group have different speeds from the other group , Because the two groups of rotors rotate in different directions , This will result in unbalance of the counter torque force , At this time, the reaction force around the central axis of the fuselage will be generated , Cause angular acceleration along the angle . Pictured 2.3 Shown , When the rotating speed of the front rear rotor is equal and greater than that of the left and right rotor , Because the former rotates clockwise , The latter is the opposite , The total counter torque is counterclockwise , The reaction force acts on the central axis of the fuselage in a counterclockwise direction , Cause counterclockwise yaw motion ; conversely , It will cause clockwise yaw motion of the aircraft .
in summary , Each flight state of the four rotor UAV is controlled by controlling the rotational speed of the symmetrical four rotors , Forming corresponding different motion combinations . But in flight, there are six degrees of freedom output , So it is a typical underdrive , strong coupling Nonlinear system . for example , rotor 1 The rotation speed will cause the UAV to roll to the left , At the same time, the torque of counterclockwise rotation will be greater than that of clockwise rotation , This further makes the UAV yaw to the left , In addition, tumbling will lead to the left translation of the UAV , It can be seen that , The attitude and translation of a four rotor UAV are coupled .
Autonomous Flight Control of four rotor UAV
Accurate track tracking of four rotor UAV is the basic requirement to realize autonomous flight of UAV . Due to the coupling relationship between attitude and translation, model parameter uncertainty and external disturbance of the four rotor UAV , Therefore, only the stable attitude control can complete the effective track tracking .
In the autonomous control system of a four rotor UAV , Attitude stabilization control is the basis of autonomous flight of aircraft . Its mission is to control the three attitude angles of the four rotor UAV ( Pitch angle 、 Roll angle 、 Yaw angle ) Track the desired attitude signal stably , And ensure that the closed-loop attitude system has the desired dynamic characteristics . Due to the coupling characteristics of attitude and translation of four rotor UAV , Analysis shows that , Only when the attitude is stable , So that the total lift of the rotor can produce a component in the desired direction , And then control the aircraft to fly along the desired track direction . The attitude of the four rotor UAV is subject to external interference and parameter error of the inaccurate model in the actual flight environment 、 Influence of unmodeled dynamics such as measurement noise on control effect . therefore , It is necessary to introduce appropriate observer and controller to estimate and compensate the total uncertainty , And the estimated error is compensated , To ensure the effective attitude tracking of the four rotor UAV in the presence of external interference .
The attitude control of four rotor UAV should be based on its actual working characteristics and dynamic model , Then for the three channels of attitude ( pitch , Roll and yaw ) The attitude controllers are designed respectively , Corresponding controllers are introduced into each channel , The process is as follows .
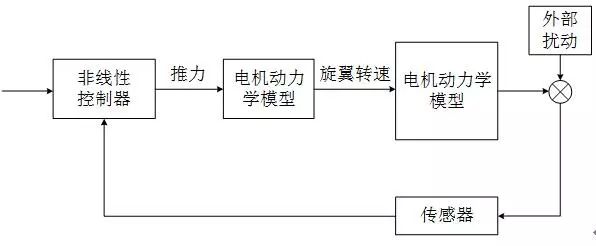
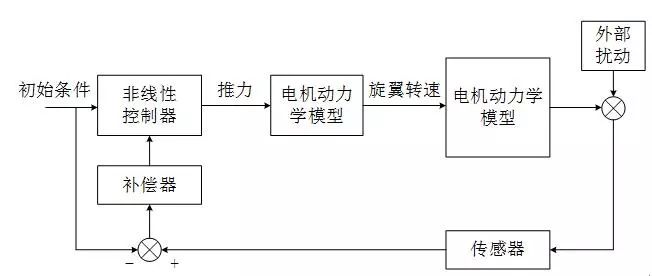
This method can basically ensure that the actual attitude value of each channel can track the last expected value . however , When only the control of the model itself is considered , The influence of external uncertainty on the closed-loop system is not considered . Micro UAV in flight , Because the body is small , The vibration of the motor is strong , It is easily disturbed by the external environment . therefore , There must be uncertainties in the whole channel , For example, model error 、 Environmental interference 、 Observation error, etc , These uncertainties will reduce the closed-loop performance of the system . So when designing the UAV Control System , The anti-interference performance of the system must be considered , That is, the robustness of the closed-loop system . Therefore, it is necessary to design a certain interference compensator to approximate and compensate the interference , To achieve stable tracking of attitude angle .
Only when the aircraft attitude can be kept stable can we further discuss how to control the path to keep stable , Analyze on a time scale , The frequency of aircraft attitude angle change is greater than the frequency of aircraft position . therefore , For track tracking, inner and outer double loop control should be used , The inner loop controls the attitude angle , Outer ring control position .
Composition and function of UAV flight control system
IMU Inertial measurement unit
The current flight control system uses three axes gyroscope , Three axis accelerometer , A three-axis geomagnetic sensor and barometer IMU, Also called inertial measurement unit . So what is a three-axis gyroscope , What is a triaxial accelerometer , What is a three-axis geomagnetic sensor , What is a barometer ? What role do they play in airplanes , Which three axes are these ?

Three axis gyroscope , Three axis accelerometer , The three axes in the three-axis geomagnetic sensor refer to the left and right of the aircraft , Front and rear vertical up and down three axes , Commonly used XYZ To represent the . The left-right direction is called roll in an aircraft , The fore-and-aft direction is called pitch in an aircraft , The vertical direction is Z Axis . The top knows , When I was a child, I basically played , It is difficult to stand on the ground without turning , Only when it turns , It will stand on the ground , Or bicycles , The bigger and heavier the wheels, the more stable the car will be , When turning, you can obviously feel a drag , This is the gyroscopic effect , According to the gyro effect , The gyroscope invented by smart people . The earliest gyroscope was a high-speed rotating gyroscope , The gyro is fixed in a frame by three flexible axes , No matter how the outer frame rotates , The gyro rotating at high speed in the middle always keeps a posture . The rotation degree of the external frame and other data can be calculated through the sensors on the three axes .
Due to the high cost , The complexity of mechanical structure , Now they are all replaced by electronic gyroscopes , The advantage of electronic gyroscope is its low cost , Small size and light weight , Only a few grams , The stability and accuracy are higher than those of mechanical gyroscopes . Say this , You will understand the role of gyroscope in flight control , It is measurement XYZ The inclination of the three axes .
So what does a three-axis accelerometer do ? Just now, the three-axis gyroscope is XYZ Three axes , Now it goes without saying that the triaxial accelerometer is also XYZ Three axes . When we start driving, we will feel a push behind us , This thrust is acceleration , Acceleration is the ratio of the change in velocity to the time at which it occurs , It is a physical quantity that describes how fast an object changes , Meters every second , For example, a car is in a stopped state , Its acceleration is 0, After starting , From every second 0 Meters per second 10 rice , when 10 second , This is the acceleration of the car , If the speed per second 10 Driving at a speed of meters , Its acceleration is 0, Again , use 10 Seconds of time to slow down , From every second 10 M decelerates to a second 5 rice , So its acceleration is negative . Three axis accelerometer is used to measure aircraft XYZ The acceleration of the three axes .
![[ Failed to transfer the external chain picture , The origin station may have anti-theft chain mechanism , It is suggested to save the pictures and upload them directly (img-8rJYPCQm-1655011314509)(https://raw.githubusercontent.com/xkyvvv/blogpic3/main/img/202206121320058.jpeg)]](http://file.elecfans.com/web1/M00/58/D8/o4YBAFtgDXaASiCtAACpSULCujg450.jpg){kind=link}
Our daily travel is based on road signs or memories to find their own face , A geomagnetic sensor senses geomagnetism , It is an electronic compass , It can let the plane know its flight direction , Nose orientation , Find the location of the task and the home . Barometer is to measure the atmospheric pressure at the current position , We all know that the higher the height , The lower the pressure is. , This is why people have altitude sickness after they arrive at the plateau , The barometer measures the air pressure at different positions , Calculate the pressure difference to obtain the current height , This is the whole IMU Inertial measurement unit , Its role in the aircraft is to sense the change of aircraft attitude , For example, is the aircraft currently tilted forward or left-right , Nose orientation 、 Altitude and other basic attitude data , So what is the role of these data in flight control ?

The most basic function of flight control is to control the balance of an aircraft flying in the air , By IMU measurement , Perceiving the current inclination data of the aircraft is compiled into an electronic signal by a compiler , This signal is transmitted to the flight control internal... Through the new signal Single chip microcomputer , SCM is responsible for the operation , According to the current data of the aircraft , Calculate a compensation direction , Compensation angle , The compensation data is then compiled into electronic signals , Transmission to steering gear or motor , The motor or steering gear is executing the command , Complete the compensation action , Then the sensors sense that the plane is stable , Give the real-time data to the single chip again , The SCM will stop the compensation signal , This forms a cycle , Most flight controls are basically 10HZ The inner circle of , That is to say 1 Refresh ten times per second .
This is the most basic function of flight control , If there is no such function , When an angle is tilted , Then the plane will quickly lose its balance and crash , In other words, if you can't measure your altitude without a barometer, you will always fill the fuel valve or lower the throttle . secondly , Fixed wing flight control and airspeed sensors , Airspeed sensors are usually located on the wing or nose , But not behind the propeller , Airspeed sensor is a two-way sensor for measuring air pressure , One way to measure static air pressure , Measure the windward pressure all the way , The current air velocity can be calculated by calculating the pressure difference between the windward pressure and the static pressure .
![[ Failed to transfer the external chain picture , The origin station may have anti-theft chain mechanism , It is suggested to save the pictures and upload them directly (img-9YIG5Cca-1655011314509)(https://raw.githubusercontent.com/xkyvvv/blogpic3/main/img/202206121320382.jpeg)]](http://file.elecfans.com/web1/M00/58/D8/o4YBAFtgDXeACzUiAABrfGswfXQ093.jpg){kind=link}
With the most basic balance 、 Height setting, compass and other functions , Not enough for a plane to navigate autonomously , Just like we go to a shopping mall , First of all, we need to know where the shopping mall is , Know where you are , Then plan the route according to the traffic conditions . The same is true of flight control , First of all, flight control needs to know where it is , That requires positioning , That's what we often say GPS, Now, we are targeting GPS、 Beidou 、 Mobile network and other positioning systems , But the mobile network positioning is the worst , If the error is good, it will be tens of meters , If it's not good, it's thousands of meters , This error is unacceptable to flight control , because GPS The positioning system is older , In addition, it is open , So most flight control systems use GPS, There are also a few Beidou Positioning Systems . The accuracy is basically 3 Minet , Generally, the open land is 50 Cm or so , Due to environmental interference , Or buildings 、 Trees and so on , Positioning may be poor , It is likely that the location is a false signal . This is why civilian drones crash frequently 、 One of the main reasons for flying away .
GPS location
GPS The positioning principle is three-point positioning , In the sky GPS The positioning satellite is far from the earth's surface 22500 Kilometers , The orbit of their motion just forms a mesh , That is to say, at any point on the earth , Both can be received at the same time 3 More than satellite signals . The satellite will continuously send out electric wave signals in the process of movement , Signal contains packets , There is a time signal .GPS The receiver solves data packets from multiple satellites , And time signals , You can clearly calculate the distance between yourself and each satellite , Use the triangular vector relationship to calculate your position .GPS Also positioned , There's data , This signal will also be compiled into an electronic signal by a compiler and transmitted to flight control , Let flight controllers know where they are 、 The location and distance of the task 、 The location and distance of the home and the current speed and height , Then the flight control pilot will fly the aircraft to the mission position or go home .
![[ Failed to transfer the external chain picture , The origin station may have anti-theft chain mechanism , It is suggested to save the pictures and upload them directly (img-y0ZjmNuD-1655011314510)(https://raw.githubusercontent.com/xkyvvv/blogpic3/main/img/202206121320440.jpeg)]](http://file.elecfans.com/web1/M00/58/D8/o4YBAFtgDXeAEAiDAABtv5bCUQs932.jpg){kind=link}
We just said ,GPS It can measure both speed and height , Why are there barometers and airspeeds ? This is to eliminate errors , The plane doesn't touch the ground when flying , The direct contact is air , Suppose the flight environment is windless , The plane taxied and accelerated on the ground , Accelerate to every second 20 Then pull up and down the rudder to take off , such GPS The measured value is accurate , But what if it's against the wind , It is because the relative movement between the wing and the air reaches a certain speed that a certain lift force can be generated to make the aircraft take off , If you are in an upwind environment , Wind speed per second 10 rice , The plane only needs to accelerate to a second 10 Meters can be off the ground normally , If you accelerate to a second 20 rice , The velocity relative to air has reached one second 30 rice , Or take off downwind , Wind speed per second 20 rice , The plane GPS The speed measurement has also reached 20m/s The speed of , Pull up and down the rudder at this time , The plane won't move , Because the relative air velocity is 0 rice , The takeoff conditions are not met , Must accelerate to per second 40 The lift off can be achieved only when the lift off time is meters .
This is the function of the airspeed meter ,GPS It only measures the ground speed , Just dropped to ,GPS You can also set the height , First of all GPS The positioning accuracy is 3 Minet , That is to say, the flight control can perceive twice the error in the plane direction , If the signal is not good, it may be more than ten meters , also GPS When not positioning , in addition GPS The fixed height data is the altitude, not the vertical height of the ground , therefore GPS Altitude setting does not work in flight control . With GPS Flight control also knows the location of the aircraft , Also know the location of the home and the location of the task , But how does the flight control know the mission of the flight control and the location of the home , This is the role of the ground station .
Ground station
Ground station , It is the base station on the ground , That is, the person who commands the aircraft , Ground stations can be divided into single point ground stations or multi-point ground stations , For example, the civil aviation airport is the ground station , All ground stations in the country and even the world are connected to the Internet from time to time , They can clearly know the planes flying in the sky , And can monitor the current flight route of the aircraft from time to time , condition , And the constant dispatch of aircraft . For example, most of the UAVs we use are single point ground stations , A single point ground station is usually attended by one or more people , There are technicians , Field personnel , Logistics Officer , Correspondent , The commander is composed of . Like a player, it's usually a person .
The ground station equipment is generally composed of remote controllers 、 The computer 、 Video display , The power supply system , Radio and other equipment , Generally speaking, it is simply a computer , A radio station , A remote control , The computer is equipped with software to control the aircraft , Plan the flight route of the aircraft through the route planning tool , And set the flight altitude , Speed of flight , Flight location , The mission data is compiled and transmitted to the flight control center through the data transmission radio connected to the data port , Here is the digital radio station , A data transmission station is a data transmission station , Like our ears , For example, the leader said what task to do today , We receive the task and answer it before we perform the task , Report the actual situation to the leaders in real time when performing tasks , One of these communications is the mouth and ears .
Data transmission radio is a main communication tool between aircraft and ground station , The interface protocols adopted by general data transmission radio stations are TTL Interface 、RS485 Interface and RS232 Interface , But there are also some CAN-BUS Bus interface , Frequency yes 2.4GHZ、433MHZ、900MHZ、915MHZ, commonly 433MHZ More of , because 433MHZ It's an open band , Plus 433MHZ Longer wavelength , Strong penetration and other advantages, so most civil users generally use it 433MHZ, The distance is 5 Kilometers to 15 Kilometers , Even farther . The ultimate goal is the communication between the aircraft and the computer , The task that the computer gives the plane , The aircraft always flies at an altitude , Speed and many other data will be transmitted through it . So that we can monitor the aircraft situation from time to time , Modify the aircraft heading at any time as required .

The working principle of the whole UAV flight control system is to start the ground station , Planning routes , Turn on the flight control , Upload the route to flight control , Then set the automatic takeoff and landing parameters , For example, the ground clearance speed during takeoff , Head up angle ( Take off angle of attack , Also called angle of attack ), Climb height , End height , Spiral radius or diameter , Empty the airspeed meter, etc , Then check for errors in flight control 、 Call the police , Everything is all right , Start taking off , After circling for a few weeks, he began to fly to the mission point , Perform tasks , And finally landed , Generally, parachute or manual descent is recommended in the suburbs , Select according to the site . If the aircraft deviates from the course during flight , Flight control will always correct this error , Keep correcting , Until reset .
The main functions of UAV flight control system
Flight status
Flight control system is mainly used for flight attitude control and navigation , For flight control , First of all, we need to know the current state of the aircraft , such as : Three dimensional position 、 Three dimensional velocity 、 Three dimensional acceleration 、 Triaxial angle and triaxial angular velocity, etc , in total 15 Status . Because the multi rotor aircraft itself is an unstable system , The power of each motor shall be continuously adjusted and distributed at an ultra-high frequency , To achieve stable hover and flight , therefore , For aerial drones , Even the simplest action of releasing the rocker and hovering the aircraft autonomously , Flight control is also required to continuously monitor this 15 Quantity , And a series of “ Cascade control ”, To achieve stable hover , This seems simple to the naked eye , But the operation in the flight control system is actually very complicated .

The most basic and difficult technical difficulty of flight control system , In fact, it is necessary to accurately perceive this series of states , If these sensing data problems or errors occur, the UAV will do some abnormal actions . at present , UAVs are generally used GPS、IMU( Inertial measurement unit )、 Barometer and geomagnetic compass to measure these states .GPS Get positioning 、 In some cases, height can also be obtained 、 Speed ;IMU It is mainly used to measure the three-axis acceleration and three-axis angular velocity of UAV , Speed and position can also be obtained by calculation ; Barometer is used to measure altitude ; The geomagnetic compass is used to measure the course .
Due to the limitation of current sensor design level , The data measured by these sensors will produce certain errors , And may be disturbed by the environment , Thus, the accuracy of state estimation is affected . To ensure flight performance , It is necessary to make full use of the common Fused with high reliability 15 Status , Integrated navigation technology . Combination of integrated navigation technology GPS、IMU、 Barometer and geomagnetic compass have their own advantages and disadvantages , Through the technology in the field of electronic signal processing , Fuse the measured values of multiple sensors , Get more accurate state measurement .
integrated navigation
In order to improve the perception ability and flight performance of aerial UAV , In addition to the above basic sensor scheme , Now the mainstream UAV products have added advanced visual sensors 、 Ultrasonic sensors and IMU Redundant navigation system with compass . The binocular stereo vision system can calculate the three-dimensional position of the object according to the continuous images , Besides obstacle avoidance function, it can also provide positioning and speed measurement . The ultrasonic module under the fuselage plays an auxiliary role in height determination , And redundant IMU And compass when a component is disturbed , The redundant navigation system will automatically switch to another sensor , The reliability of integrated navigation is greatly improved .
Because of the perfect combination of these sensor technologies , UAV has intelligent navigation system , Expand the activity environment , And improved reliability . UAVs using traditional navigation systems are waiting indoors GPS Can't fly stably in the environment , And the intelligent navigation system is GPS When the signal is good , The accuracy of speed and position measurements can be improved visually ; stay GPS When the signal is insufficient , The visual system can take over GPS Provide positioning and speed measurement , Let the UAV fly stably in both indoor and outdoor environments .

The intelligent navigation system introduces multiple sensors , The amount and complexity of data have increased significantly , learn Dajiang In fact, the navigation and flight control algorithms are reconstructed many times for vision and sensors , Add new software modules and architectures , The flight performance and reliability have been comprehensively improved .
Control performance
The advanced control algorithm of the flight control system brings high control quality to the flight and control of the aerial camera UAV , For example, in the normal state, the performance is high control accuracy , Flight stability , Fast . High speed flight not only has higher requirements for the power system , What is more important is that flight control should achieve high control quality and response speed , Except for high-speed flight , The aircraft can also achieve high accuracy in hovering and slow control .

in addition , When designing flight control , It is not only necessary to consider the control accuracy of the normal flight state , Such as hovering position control accuracy , Attitude control accuracy, etc , It is also necessary to strengthen the control quality of abnormal flight conditions . Such as breaking the propeller of an aircraft 、 Suddenly hit 、 After sudden loading or interference by other external forces , More control and recovery capability , Strong robustness , Able to cope with many extreme situations , This is especially important for flight safety .
Troubleshooting
Before or during takeoff , Any minor fault may cause a flight accident . If the flight control system can continuously carry out fault monitoring and fault diagnosis in real time , Can greatly reduce the probability of accidents . The flight control system can monitor such as vibration 、 voltage 、 electric current 、 temperature 、 Speed and other flight status parameters , And through these monitoring characteristic signals to carry out fault diagnosis . But these signals are often complex and have no obvious regularity , Only through data mining on a large number of fault data , use Deep learning The flight control fault diagnosis system is established based on the technology , The probability of failure is determined by pattern recognition , This system can judge from launching oars in the air to IMU Fault diagnosis, etc , Early prediction of faults , Or carry out emergency treatment , Make flying safer .
Only the fastest way to monitor and determine the fault , At the same time, the flight control system uses correct information for flight control in an instant , The aircraft is actually on its own “ Analyze and decide ”. By this time , In a sense , That's the real thing “ Intelligent robot ”.
Full text from :
http://www.elecfans.com/d/719442.html
边栏推荐
- Database object, sequence, view, index
- Introduction to MCU peripherals: temperature sensor DS18B20
- Goframe day 4
- Single chip microcomputer: basic concepts of a/d and d/a
- 单片机/嵌入式的实时性疑问解答
- No more! Another member of the team left..
- LVS 4 - tier Load Balancing Cluster (3) Cluster Function Classification - HPC
- Installing MySQL 8.0.20 under Linux and ubuntu20.04 LTS
- LVS四层负载均衡集群(3)集群功能分类 - HPC
- leetcode. 1 --- sum of two numbers
猜你喜欢

【測試開發】自動化測試selenium(三)——unittest框架解析

【测试开发】软件测试基础篇

单片机信号发生器程序
【 développement d'essais 】 sélénium d'essais automatisés (Ⅲ) - - analyse du cadre unitest
![[笔记]vs2015 编写汇编masm32之使用MASM32库](/img/f5/b47336af248d1b485208ec3f9ca12b.png)
[笔记]vs2015 编写汇编masm32之使用MASM32库

Ego planner code analysis ----cmakelists Txt and package xml

2022 spring semester summary

5G China unicom 直放站 网管协议 实时性要求

单片机:A/D 和 D/A 的基本概念

大疆无人机飞控系统的原理、组成及各传感器的作用
随机推荐
[web] cookies and sessions
UnionPay commerce - merchant statistics service platform
【Web】Cookie 和 Session
Ego planner code analysis ----cmakelists Txt and package xml
Flex layout
Lambda终结操作max&min
[multithreading] what is multithreading in the end -- the elementary level of multithreading (review for self use)
[MySQL] index and transaction
Very simple installation and configuration of nodejs
高等数学(第七版)同济大学 习题1-2 个人解答
V-bind and v-on
SQL injection case demonstration and preventive measures
手机私有充电协议解读
Lambda终结操作查找与匹配findAny
Goframe day 4
史上最详细的Swin-Transformer 掩码机制(mask of window attentation)————shaoshuai
微信扫描二维码无法下载文件的解决办法
Lambda end operation count
单片机:RS485 通信与 Modbus 协议
Lambda终结操作查找与匹配noneMatch