当前位置:网站首页>【学习日记】win64配置openni的vs2022编译环境
【学习日记】win64配置openni的vs2022编译环境
2022-08-02 18:41:00 【RainyMacondo】
1
在structure官网下载OpenNI的SDK,注意版本对应无误
2
解压后,运行msi文件,安装提示完成安装
3
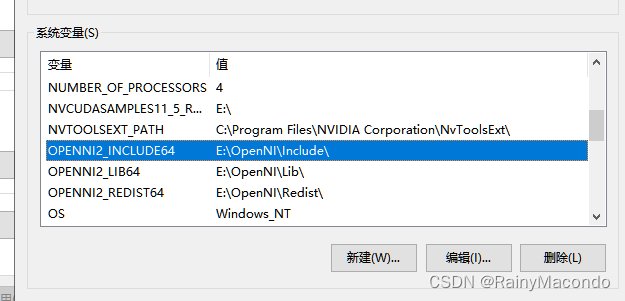
安装后,环境变量中自动生成了三项内容
4
vs2022中的配置:
我选择了release,x64平台。
需要设置三处地方,如下图所示。
1、VC++——包含目录填写上文提到的环境变量OPENNI_INCLUDE64的路径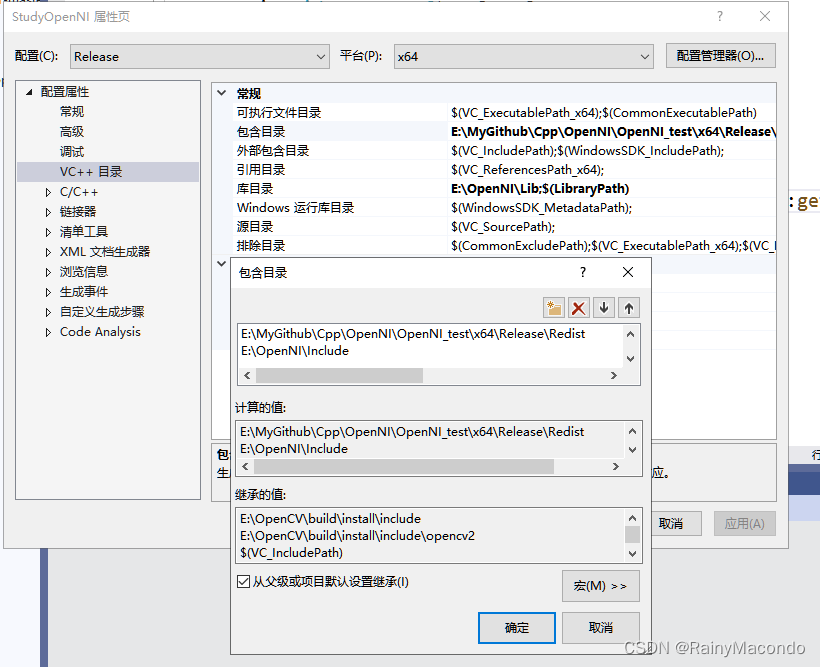
2、VC++——库目录填写上文提到的环境变量OPENNI_LIB64的路径
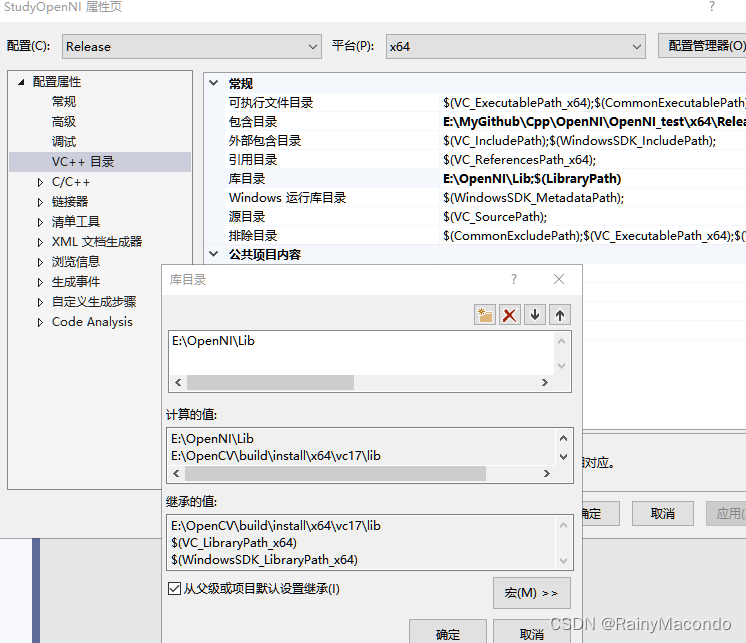
**3、输出——附加依赖项:**填写OpenNI2.lib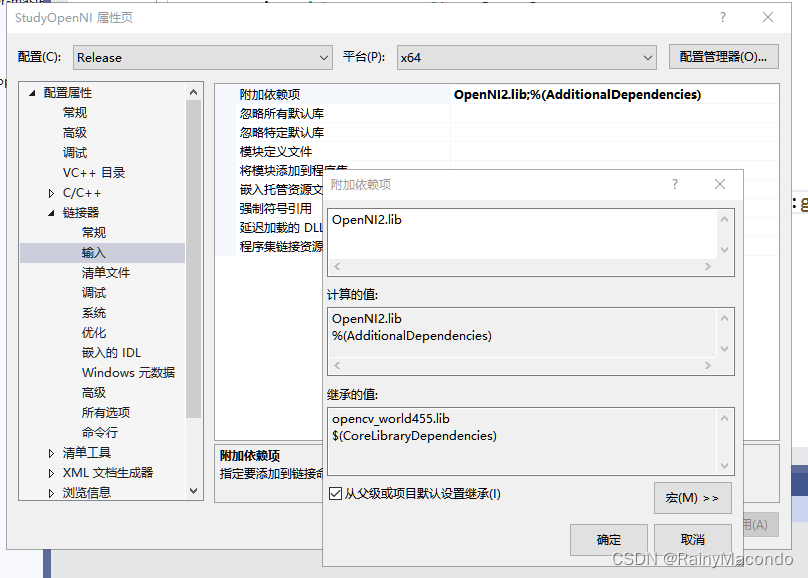
5 其他注意点
1、网上有人说要把Redist文件和编译生成的exe放在一个文件夹下,不知道为什么。似乎不进行这步操作也没有影响。保险起见,我也在复制了一份放在里面。
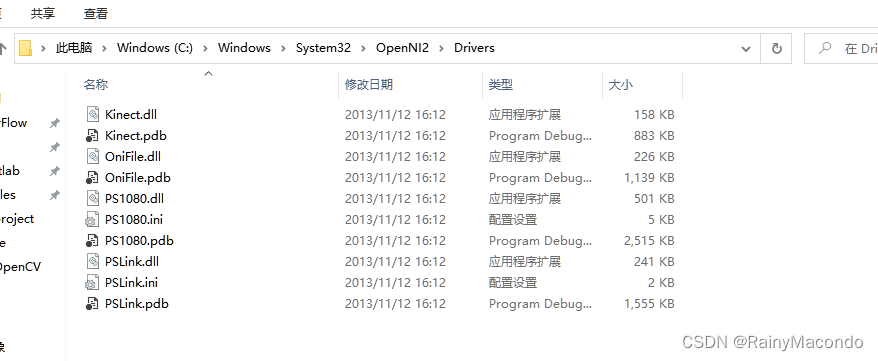
2、程序运行出现如下报错:
Found no files matching 'C:\WINDOWS\SYSTEM32\OpenNI2\Drivers\*.dll'
我直接在System32下自己新建了文件夹,把dll全部复制过去,然后就不会出现这条错误了。
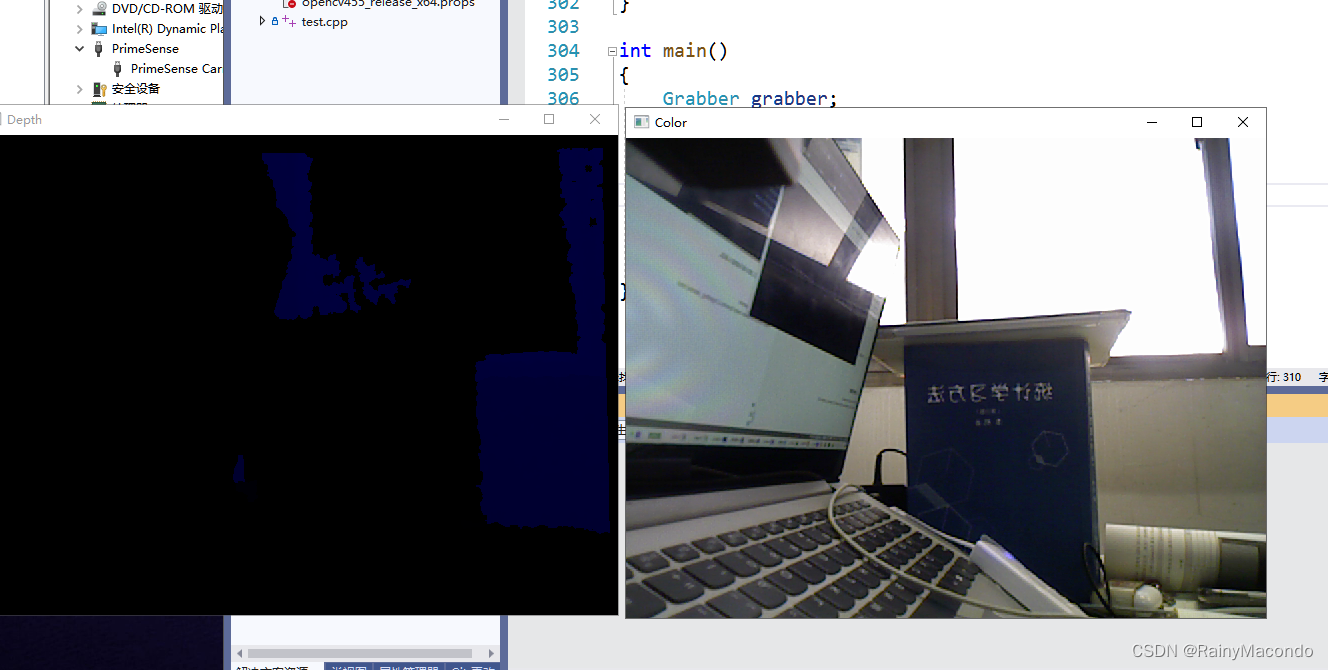
6 测试是否配置成功
test.cpp
#include <opencv2/opencv.hpp>
#include <OpenNI.h>
#include "opencv2/imgproc/types_c.h"
using namespace openni;
using namespace cv;
class Grabber
{
public:
void InitOpenNI();
void InitDevice();
void InitDepthStream();
void InitColorStream();
void Run();
private:
void CapturePsenseDepthFrame();
void CapturePsenseColorFrame();
cv::Mat ChangeDepthForDisplay(const cv::Mat& mat);
openni::Device* device_;
openni::VideoStream* depth_stream_;
openni::VideoStream* color_stream_;
openni::VideoFrameRef* depth_frame_;
openni::VideoFrameRef* color_frame_;
};
void Grabber::InitOpenNI()
{
auto rc = openni::OpenNI::initialize();
if (rc != openni::STATUS_OK)
{
printf("Initialize failed\n%s\n", openni::OpenNI::getExtendedError());
exit(0);
}
}
void Grabber::InitDevice()
{
device_ = new openni::Device();
auto rc = device_->open(openni::ANY_DEVICE);
if (rc != openni::STATUS_OK)
{
printf("Couldn't open device\n%s\n", openni::OpenNI::getExtendedError());
exit(0);
}
}
void Grabber::InitDepthStream()
{
depth_stream_ = new openni::VideoStream();
// Create depth stream from device
if (device_->getSensorInfo(openni::SENSOR_DEPTH) != nullptr)
{
auto rc = depth_stream_->create(*device_, openni::SENSOR_DEPTH);
if (rc != openni::STATUS_OK)
{
printf("Couldn't create depth stream\n%s\n", openni::OpenNI::getExtendedError());
exit(0);
}
}
// Get info about depth sensor
const openni::SensorInfo& sensor_info = *device_->getSensorInfo(openni::SENSOR_DEPTH);
const openni::Array<openni::VideoMode>& arr = sensor_info.getSupportedVideoModes();
// Look for VGA mode in depth sensor and set it for depth stream
for (int i = 0; i < arr.getSize(); ++i)
{
const openni::VideoMode& vmode = arr[i];
if (vmode.getPixelFormat() == openni::PIXEL_FORMAT_DEPTH_1_MM &&
vmode.getResolutionX() == 640 &&
vmode.getResolutionY() == 480)
{
depth_stream_->setVideoMode(vmode);
break;
}
}
// Start the depth stream
auto rc = depth_stream_->start();
if (rc != openni::STATUS_OK)
{
printf("Couldn't start the depth stream\n%s\n", openni::OpenNI::getExtendedError());
exit(0);
}
depth_frame_ = new openni::VideoFrameRef();
}
void Grabber::InitColorStream()
{
color_stream_ = new openni::VideoStream();
if (device_->getSensorInfo(openni::SENSOR_COLOR) != nullptr)
{
auto rc = color_stream_->create(*device_, openni::SENSOR_COLOR);
if (rc != openni::STATUS_OK)
{
printf("Couldn't create color stream\n%s\n", openni::OpenNI::getExtendedError());
exit(0);
}
}
// Get info about color sensor
const openni::SensorInfo& sensor_info = *device_->getSensorInfo(openni::SENSOR_COLOR);
const openni::Array<openni::VideoMode>& arr = sensor_info.getSupportedVideoModes();
// Look for VGA mode and set it for color stream
for (int i = 0; i < arr.getSize(); ++i)
{
const openni::VideoMode& vmode = arr[i];
if (
vmode.getResolutionX() == 640 &&
vmode.getResolutionY() == 480)
{
color_stream_->setVideoMode(vmode);
break;
}
}
// Note: Doing image registration earlier than this seems to fail
if (device_->isImageRegistrationModeSupported(openni::IMAGE_REGISTRATION_DEPTH_TO_COLOR))
{
auto rc = device_->setImageRegistrationMode(openni::IMAGE_REGISTRATION_DEPTH_TO_COLOR);
if (rc == openni::STATUS_OK)
std::cout << "Depth to color image registration set success\n";
else
std::cout << "Depth to color image registration set failed\n";
}
else
{
std::cout << "Depth to color image registration is not supported!!!\n";
}
// Start color stream
auto rc = color_stream_->start();
if (rc != openni::STATUS_OK)
{
printf("Couldn't start the depth stream\n%s\n", openni::OpenNI::getExtendedError());
exit(0);
}
color_frame_ = new openni::VideoFrameRef();
}
void Grabber::CapturePsenseDepthFrame()
{
auto rc = depth_stream_->readFrame(depth_frame_);
if (rc != openni::STATUS_OK)
{
printf("Read failed!\n%s\n", openni::OpenNI::getExtendedError());
}
if (depth_frame_->getVideoMode().getPixelFormat() != openni::PIXEL_FORMAT_DEPTH_1_MM && depth_frame_->getVideoMode().getPixelFormat() != openni::PIXEL_FORMAT_DEPTH_100_UM)
{
printf("Unexpected frame format\n");
}
// Get pointer to Primesense depth frame
openni::DepthPixel* dev_buf_ptr = (openni::DepthPixel*)depth_frame_->getData();
// Copy frame data to OpenCV mat
cv::Mat depth_mat(depth_frame_->getHeight(), depth_frame_->getWidth(), CV_16U, dev_buf_ptr);
cv::Mat disp_mat = ChangeDepthForDisplay(depth_mat);
cv::imshow("Depth", disp_mat);
}
void Grabber::CapturePsenseColorFrame()
{
// Read from stream to frame
auto rc = color_stream_->readFrame(color_frame_);
if (rc != openni::STATUS_OK)
{
printf("Read failed!\n%s\n", openni::OpenNI::getExtendedError());
}
// Pointer to Primesense color frame
openni::RGB888Pixel* dev_buf_ptr = (openni::RGB888Pixel*)color_frame_->getData();
// Make mat from camera data
cv::Mat color_mat(color_frame_->getHeight(), color_frame_->getWidth(), CV_8UC3, dev_buf_ptr);
// Convert to BGR format for OpenCV
cv::cvtColor(color_mat, color_mat, CV_RGB2BGR);
cv::imshow("Color", color_mat);
}
void Grabber::Run()
{
openni::VideoStream* streams[] = {
depth_stream_, color_stream_ };
while (true)
{
int readyStream = -1;
auto rc = openni::OpenNI::waitForAnyStream(streams, 2, &readyStream, 2000);
if (rc != openni::STATUS_OK)
{
printf("Wait failed! (timeout is %d ms)\n%s\n", 2000, openni::OpenNI::getExtendedError());
break;
}
switch (readyStream)
{
case 0:
CapturePsenseDepthFrame();
break;
case 1:
CapturePsenseColorFrame();
break;
default:
printf("Unxpected stream\n");
}
char c = cv::waitKey(10);
if ('q' == c)
break;
}
}
cv::Mat Grabber::ChangeDepthForDisplay(const cv::Mat& mat)
{
assert(CV_16U == mat.type());
const float depth_near = 500;
const float depth_far = 5000;
const float alpha = 255.0 / (depth_far - depth_near);
const float beta = -depth_near * alpha;
cv::Mat fmat;
mat.convertTo(fmat, CV_32F);
for (int r = 0; r < mat.rows; ++r)
{
for (int c = 0; c < mat.cols; ++c)
{
float v = fmat.at<float>(r, c) * alpha + beta;
if (v > 255) v = 255;
if (v < 0) v = 0;
fmat.at<float>(r, c) = v;
}
}
cv::Mat bmat;
fmat.convertTo(bmat, CV_8U);
cv::Mat cmat;
cv::cvtColor(bmat, cmat, CV_GRAY2BGR);
cv::applyColorMap(cmat, cmat, cv::COLORMAP_OCEAN);
return cmat;
}
int main()
{
Grabber grabber;
grabber.InitOpenNI();
grabber.InitDevice();
grabber.InitDepthStream();
grabber.InitColorStream();
grabber.Run();
return 0;
}
运行,没有问题,可以顺利看到摄像头画面。显示depth和color图。
参考资料
https://structure.io/openni
https://documentation.help/OpenNI-2.0/getting_started.html
边栏推荐
猜你喜欢
如何正确地配置入口文件?

86.(cesium之家)cesium叠加面接收阴影效果(gltf模型)

浅谈混迹力扣和codeforces上的几个月
selenium安装和环境配置Firefox
I have 8 years of experience in the Ali test, and I was able to survive by relying on this understanding.

通信大学生走向岗位,哪些技能最实用?
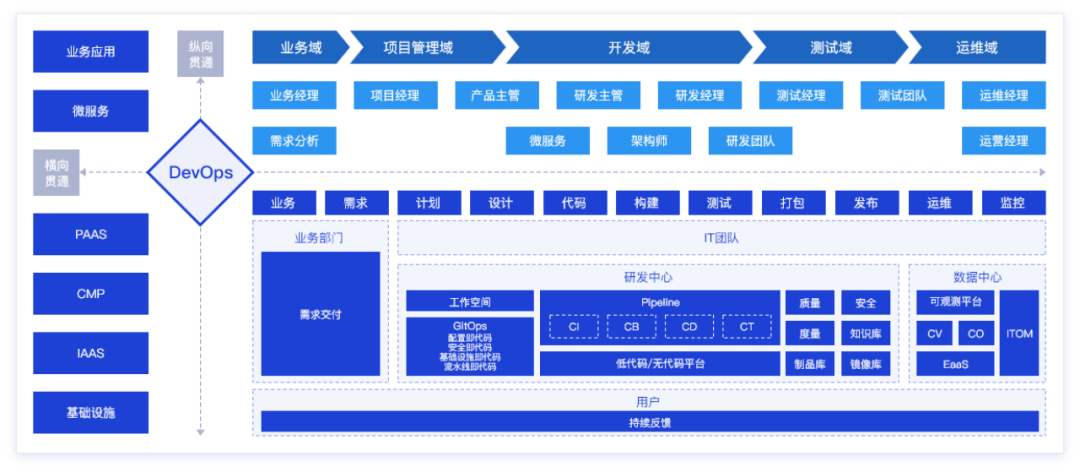
博云入选 Gartner 中国 DevOps 代表厂商
Go----Go 语言快速体验之开发环境搭建及第一个项目HelloWord
「日志」深度学习 CUDA环境配置
【C语言刷题】牛客网刷题——替换空格
随机推荐
mongodb的游标
进程与线程
平稳发展 | 西欧地区手游玩家的数据和洞察
7.25 - 每日一题 - 408
3 and a half years of testing experience, I don't have 20K, it seems it's time to change jobs
洛谷P4799 世界冰球锦标赛
WPF使用Prism登录
阿里测试8年经验,靠着这份理解,我才得以生存下来
千万级别的表分页查询非常慢,怎么办?
【C语言刷题】Leetcode169——多数元素
register和volatile的区别
麦聪DaaS平台 3.7.0 Release 正式发布:全面支持国际化
Boyun Selected as Gartner China DevOps Representative Vendor
固态硬盘接口类型介绍
MySQL主从搭建(问题大聚集,告别部署烦恼)
【C语言刷题】牛客网刷题——替换空格
Win11主题下载一直转圈怎么办?Win11主题下载一直转圈的解决方法
知识点滴 - 什么是iAP2 (上)
浅谈一下pyd文件的逆向
为何国内年轻人都抢购iPhone,因为它更实惠也更亲民