当前位置:网站首页>LeetCode每日一练 —— 环形链表问题(面试四连问)
LeetCode每日一练 —— 环形链表问题(面试四连问)
2022-08-01 00:58:00 【飞向星的客机】
前言
Wassup guys!我是Edison
今天是 LeetCode 上的两道题: 141. 环形链表 和 142. 环形链表 II
Let’s get it!

判断链表是否有环
1. 题目描述
给你一个链表的头节点 head ,判断链表中是否有环。
如果链表中有某个节点,可以通过连续跟踪 next 指针再次到达,则链表中存在环。
为了表示给定链表中的环,评测系统内部使用整数 pos 来表示链表尾连接到链表中的位置(索引从 0 开始)。
注意:pos 不作为参数进行传递 。仅仅是为了标识链表的实际情况。
如果链表中存在环 ,则返回 true 。 否则,返回 false 。
示例 1: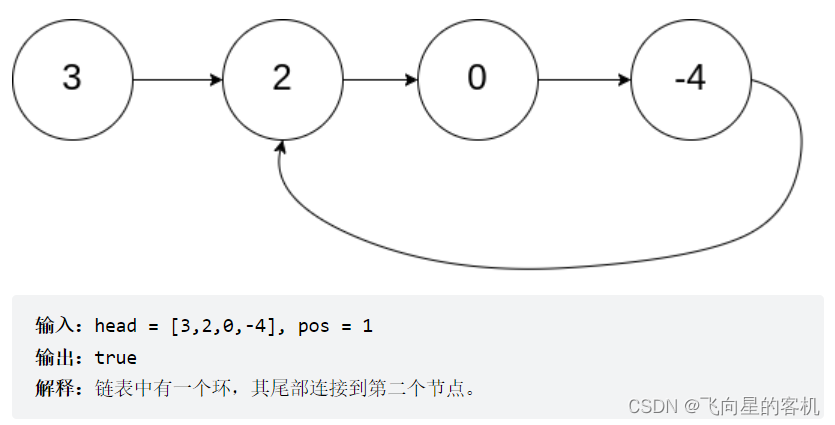
示例 2:
示例 3:
2. 思路分析
这道题的思路很简单,还是用 快慢指针;
每当慢指针 slow 前进一步,快指针 fast 就前进两步。
如果 fast 最终遇到空指针,说明链表中没有环;
如果 fast 最终和 slow 相遇,那肯定是 fast 超过了 slow 一圈,说明链表中含有环。
注意,如果链表没有环:
链表如果是 奇数 个,那么 slow 走一步,fast 走两步的话,那么 fast 一定走到 尾节点 ,所以终止循环的条件就是
fast->next != NULL。
链表如果是 奇数 个,那么 slow 走一步,fast 走两步的话,那么 fast 一定走到 NULL 的位置,所以终止循环的条件就是fast != NULL。
3. 动图演示
准备两个指针 fast 和 slow,循环链表;
slow 指针初始也指向 head,每次循环向前走一步;
fast 指针初始指向 head,每次循环向前两步;
如果没有环,则快指针会抵达终点,如果有环,那么快指针会追上慢指针(动图演示)
4. 代码实现
接口代码
bool hasCycle(struct ListNode *head) {
// 快慢指针初始化指向 head
struct ListNode* slow = head;
struct ListNode* fast = head;
// 快指针 走到末尾时停止
while (fast && fast->next) {
slow = slow->next; //慢指针走一步
fast = fast->next->next; //快指针走两步
// 快慢指针相遇,说明含有环
if (slow == fast) {
return true;
}
}
// 不包含环
return false;
}
提交结果
返回链表入环的第一个结点
1. 题目描述
给定一个链表的头节点 head ,返回链表开始入环的第一个节点。
如果链表无环,则返回 null。
示例 1: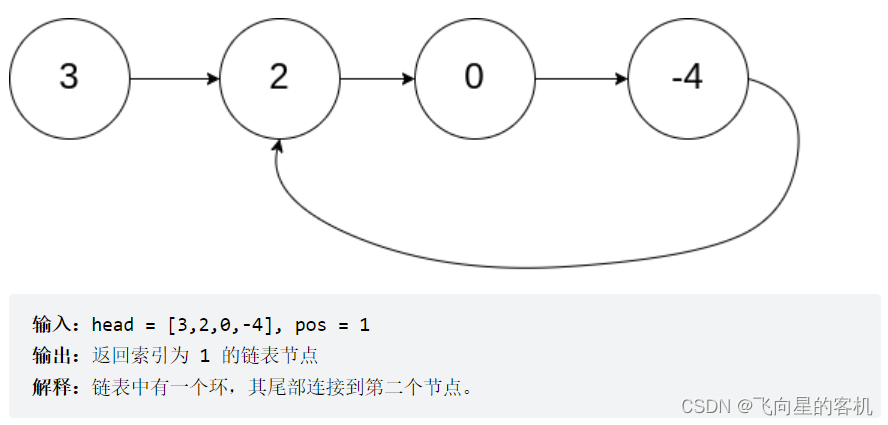
示例 2: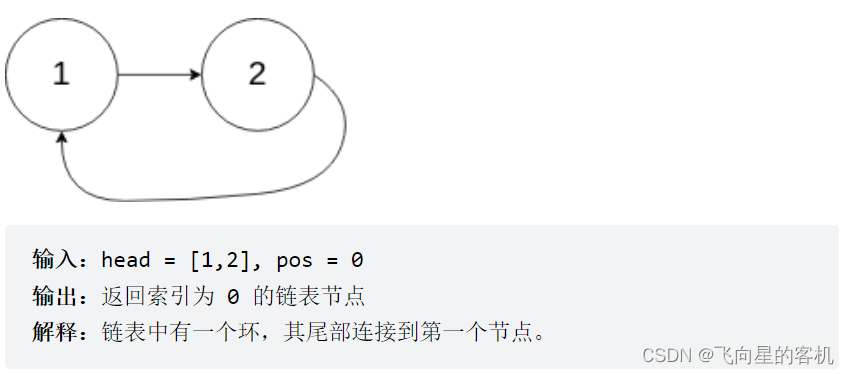
示例 3:
2. 思路分析
这已经不是一道简单的代码题了,确切的来说,是 数学公式推导 + 逻辑结合 的一道题。
为什么要这样呢?这里简单说一下其中的原理。
通过上面的第一道题,已经学会了判断链表是否有环了,那么接下来要找这个环的入口了。
假设从 头结点 到环形 入口节点 的节点数为 x。
环形 入口节点 到 fast 指针与 slow 指针 相遇节点 节点数为 y。
从 相遇节点 再到环形 入口节点 的节点数为 z。 (如图所示)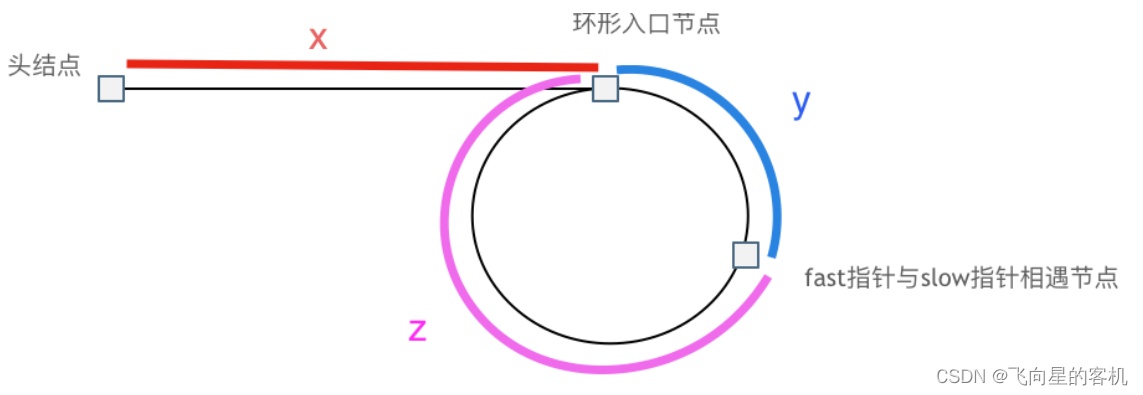
那么相遇时:
slow 指针走过的节点数为:: x + y x + y x+y
fast 指针走过的节点数: x + y + n ( y + z ) x + y + n (y + z) x+y+n(y+z),n 为 fast 指针在环内走了 n 圈才遇到 slow 指针, ( y + z ) (y+z) (y+z)为一圈内节点的个数。
因为 fast 指针是一步走两个节点,slow 指针一步走一个节点, 所以 f a s t 指针走过的节点数 = s l o w 指针走过的节点数 ∗ 2 fast 指针走过的节点数 = slow 指针走过的节点数 * 2 fast指针走过的节点数=slow指针走过的节点数∗2,也就是
( x + y ) ∗ 2 = x + y + n ( y + z ) (x + y) * 2 = x + y + n (y + z) (x+y)∗2=x+y+n(y+z)
两边同时消掉一个 ( x + y ) (x+y) (x+y),化简得: x + y = n ( y + z ) x + y = n (y + z) x+y=n(y+z);
因为我们要找环形的入口,那么要求的是 x,因为 x 表示 头结点 到 环形入口节点 的距离。
所以我们要求 x ,将 x 单独放在左边: x = n ( y + z ) − y x = n (y + z) - y x=n(y+z)−y;
在从 n ( y + z ) n(y+z) n(y+z) 中提出一个 ( y + z ) (y+z) (y+z) 来,整理公式之后为如下公式: x = ( n − 1 ) ( y + z ) + z x = (n - 1) (y + z) + z x=(n−1)(y+z)+z ;
注意这里 n 一定是大于等于 1 的,因为 fast 指针 至少要多走一圈 才能相遇 slow 指针。
这个公式说明什么呢?
先拿 n 为 1 的情况来举例,意味着 fast 指针在环形里转了一圈之后,就遇到了 slow 指针了。
当 n 为 1 的时候,公式就化解为 x = z x = z x=z;
这就意味着,从头结点出发一个指针,从相遇节点也出发一个指针,这两个指针每次只走一个节点, 那么当这两个指针相遇的时候就是环形入口的节点。
也就是在相遇节点处,定义一个指针 index1,在头结点处定一个指针 index2。
让 index1 和 index2 同时移动,每次移动一个节点, 那么他们相遇的地方就是环形入口的节点。 (动图演示)
那么 n 如果大于 1 是什么情况呢?就是 fast 指针在环形转 n 圈之后才遇到 slow 指针。
其实这种情况和 n 为 1 的时候 效果是一样的,一样可以通过这个方法找到 环形的入口节点,只不过,index1 指针在环里 多转了 (n-1) 圈,然后再遇到 index2,相遇点依然是环形的入口节点。
3. 简化思路
我们假设 快慢指针相遇 时,慢指针 slow 走了 k 步,那么快指针 fast 一定走了 2k 步(如图所示)
fast 一定比 slow 多走了 k 步,这多走的 k 步其实就是 fast 指针在环里转圈圈,所以 k 的值就是环长度的「整数倍」。
假设 相遇点 距 环的起点 的距离为 m,(见下图)那么 环的起点 距头结点 head 的距离为 k - m,也就是说如果从 head 前进 k - m 步就能到达环起点。
如果从相遇点继续前进 k - m 步,也恰好到达环起点。因为结合上图的 fast 指针,从相遇点开始走 k 步可以转回到相遇点,那走 k - m 步肯定就走到环起点了(如图所示)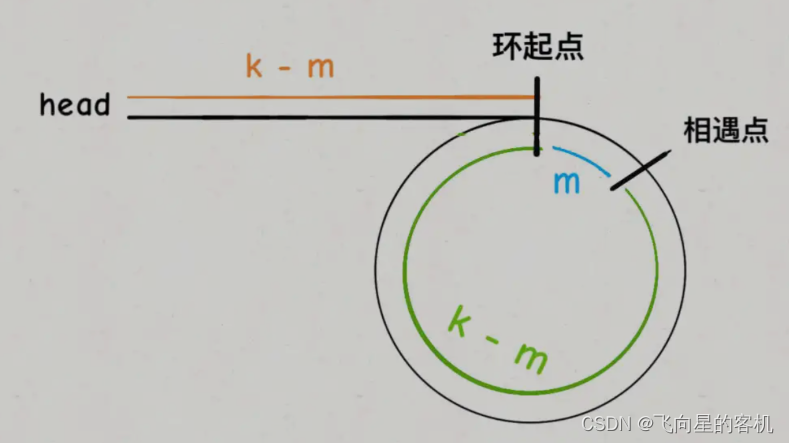
所以,只要我们把快慢指针中的任一个重新指向 head,然后两个指针同速前进,k - m 步后一定会相遇,相遇之处就是环的起点了
4. 代码实现
接口代码
struct ListNode *detectCycle(struct ListNode *head) {
struct ListNode* slow = head;
struct ListNode* fast = head;
while (fast && fast->next) {
slow = slow->next; // 慢指针走一步
fast = fast->next->next; // 快指针走两步
// 相遇了
if (slow == fast) {
struct ListNode* meet = slow;
while (meet != head) {
meet = meet->next; // 一个指针从出发点开始走
head = head->next; // 一个指针从出发点开始走
}
// meet和head相等时,返回的就是入口点
return meet;
}
}
// 链表不带环
return NULL;
}
提交结果
扩展追问
这道题的实现很简单,但是这里会有几个扩展问题,需要证明!
(1)slow 一次走 1 步,fast 一次走 2 步,一定能追上吗?
(2)slow 一次走 1 步,fast 一次走 3 步,能追上吗?fast 走 4 步呢?或者 fast 走 n 步呢?能追上吗?
针对上面的两个问题作出解答,并证明!
问题一
slow 一次走 1 步,fast 一次走 2 步,一定能追上吗?
假设链表带环,两个指针最后都会进入环,快指针先进环,慢指针后进环。
当慢指针刚进环时,可能就和快指针相遇了,假设 快指针 和 慢指针 之间的距离为 N。
在他们移动的过程中,快指针往前走两步,慢指针走一步,此时,两个指针每移动一次,之间的距离就缩小 1 步,直到缩小为 0,那么就意味着他们相遇了,所以不会出现每次刚好是套圈的情况,
因此,在慢指针走到一圈之前,快指针肯定是可以追上慢指针的,即相遇。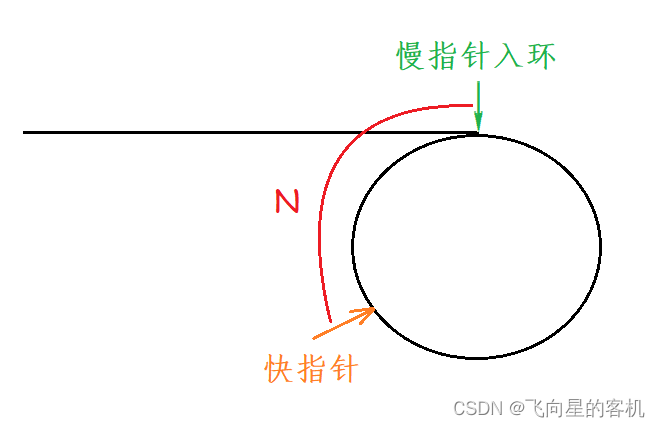
问题二
slow 一次走 1 步,fast 一次走 3 步,能追上吗?fast 走 4 步呢?或者 fast 走 n 步呢?能追上吗?
在他们前进的过程中,快指针 每次走 3 步,慢指针 每次走 1 步,此时 快指针 肯定 先进环,慢指针 就 后进环。
假设 慢指针 进环时,快指针 和 慢指针 之间的距离为 N,又因为 快指针 每次走 3 步,慢指针 每次走 1 步,所以每走一次,他们之间的距离就缩小 2 。
此时要分 两 种情况:
1、如果 N 为偶数,那么他们之间的距离最终会缩小 0,也就是相遇。
2、如果 N 为奇数,那么他们之间的会减到 1,然后减到 负1,减到 负1 也就意味着他们之间的距离又变成了 C - 1(C 是环的周长),此时又分为 2 种情况;
2.1、若 C 为奇数,则 C - 1 为偶数,因为他们之间的距离一次缩小 2,所以他们还是会相遇;
2.2、若 C 为偶数,则 C - 1 为奇数,也就是说他们之间的距离还是奇数,那么他们永远都不会相遇。
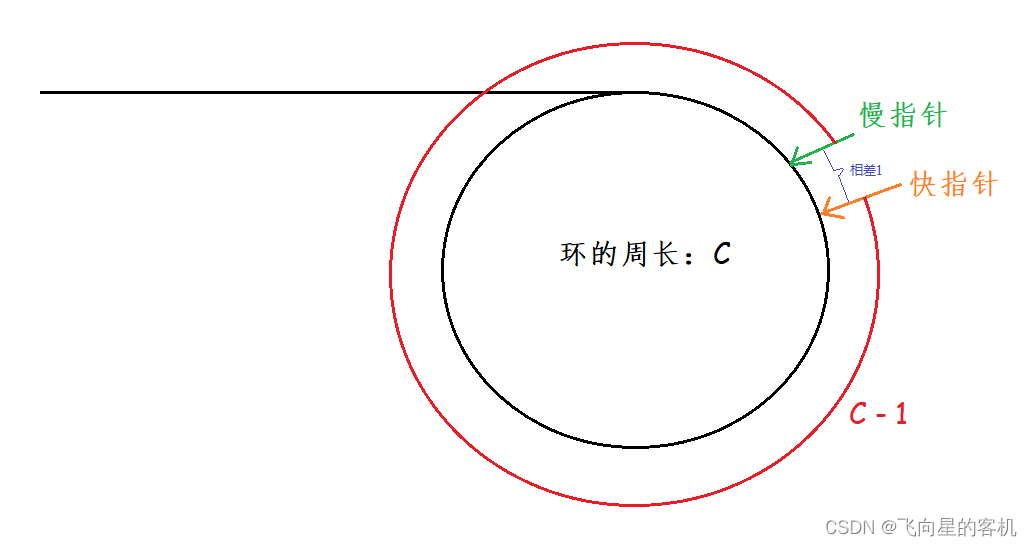
总结:
当慢指针走一步,快指针走三步时。
若 慢指针进环时 与 快指针 之间的距离为 奇数,并且环的周长恰好为 偶数,那么他们会一直在环里面打转转,永远不会相遇。
边栏推荐
- 【Cryptography/Cryptanalysis】Cryptanalysis method based on TMTO
- 精心总结十三条建议,帮你创建更合适的MySQL索引
- Kyoto University: Masaki Waga | Dynamic Masking for Reinforcement Learning in Black Box Environments
- GDB 源码分析系列文章五:动态库延迟断点实现机制
- [Reading Notes -> Data Analysis] 02 Data Analysis Preparation
- Application of integrated stepper motor in UAV automatic airport
- 【密码学/密码分析】基于TMTO的密码分析方法
- The difference between /usr/local/bin and /usr/bin
- 对象缓存服务的思考和实现
- Binary tree traversal non-recursive program -- using stack to simulate system stack
猜你喜欢

Redis五种数据类型简介
Southern University of Science and Technology: Xiaoying Tang | AADG: Automatic Enhancement for Generalization in the Field of Retinal Image Segmentation

MYSQL主从复制
谷歌『云开发者速查表』;清华3D人体数据集;商汤『通用视觉框架』公开课;Web3极简入门指南;高效深度学习免费书;前沿论文 | ShowMeAI资讯日报
Classes and Objects: Above
RTL8762DK PWM(七)

Matlab / Arcgis处理nc数据

Key Points Estimation and Point Instance

TFC CTF 2022 WEB Diamand WriteUp
MYSQL经典面试题
随机推荐
如何设计高可用高性能中间件 - 作业
zeno使用方法笔记
现代企业架构框架1
类和对象:中
Rasa 3.x Study Series - Rasa - Issues 4898 Study Notes
C# Rectangle basic usage and picture cutting
When can I use PushGateway
南方科技大学:Xiaoying Tang | AADG:视网膜图像分割领域泛化的自动增强
mysql having的用法
虹科分享|如何用移动目标防御技术防范未知因素
[微服务]分布式事务解决方案-Seata
Google "Cloud Developer Quick Checklist"; Tsinghua 3D Human Body Dataset; SenseTime "Universal Vision Framework" open class; Web3 Minimalist Getting Started Guide; Free Books for Efficient Deep Learni
OSD读取SAP CRM One Order应用日志的优化方式
清华大学陈建宇教授团队 | 基于接触丰富机器人操作的接触安全强化学习框架
简单的vim配置
Key Points Estimation and Point Instance
Js replication
[Cloud Residency Co-Creation] [HCSD Big Celebrity Live Broadcast] Personally teach the secrets of interviews in big factories
MYSQL逻辑架构
欧拉系统(euleros):升级Mysql