当前位置:网站首页>Opencv Learning Notes 6 -- image feature [harris+sift]+ feature matching
Opencv Learning Notes 6 -- image feature [harris+sift]+ feature matching
2022-07-01 14:55:00 【Cloudy_ to_ sunny】
opencv Learning Notes 6 -- Image features [harris+SIFT]+ Feature matching
Image features (SIFT-Scale Invariant Feature Transform)
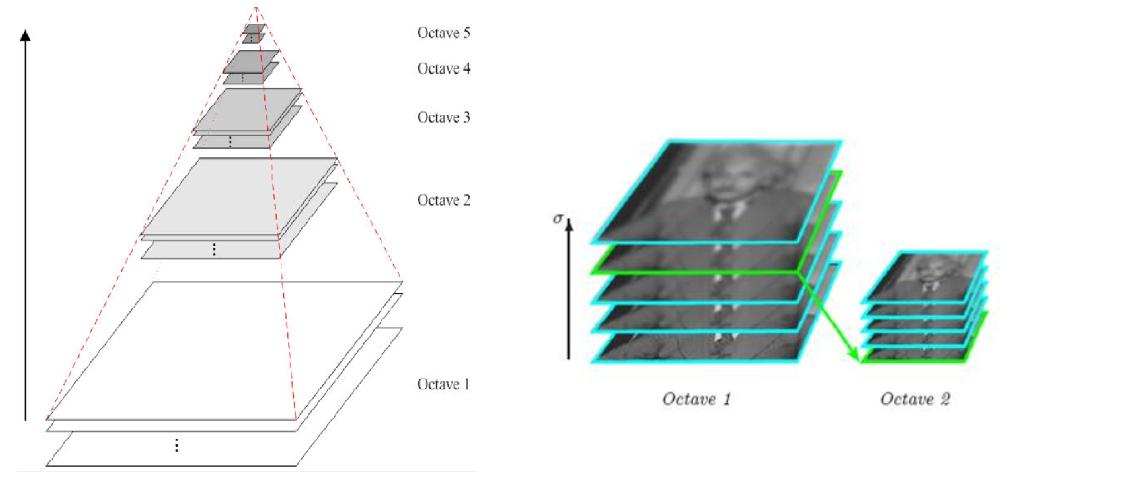
Image scale space
To a certain extent , Whether the object is big or small , The human eye can tell , But it's hard for computers to have the same capabilities , So let the machine be able to have a unified understanding of objects at different scales , We need to consider the characteristics of images in different scales .
The scale space is usually obtained by Gaussian blur


Different σ The Gaussian function determines the smoothness of the image , The bigger σ The more blurred the image is .
Multiresolution pyramid
Gaussian difference pyramid (DOG)


DoG Spatial extremum detection
In order to find the extremum of scale space , Each pixel and its image domain ( The same scale space ) And scale domain ( Adjacent scale space ) Compare all the adjacent points of , When it is greater than ( Or less than ) At all adjacent points , This point is the extreme point . As shown in the figure below , In the middle of the detection point and its image of 3×3 Neighborhood 8 Pixels , And its adjacent upper and lower floors 3×3 field 18 Pixels , common 26 Compare pixels .

Precise positioning of key points
The key points of these candidates are DOG The local extremum of a space , And these extreme points are discrete points , One way to accurately locate the extreme point is , For scale space DoG Function for curve fitting , Calculate its extreme point , So as to realize the precise positioning of key points .


Eliminate boundary response

The main direction of the feature point

Each feature point can get three information (x,y,σ,θ), I.e. location 、 Scale and direction . Keys with multiple directions can be copied into multiple copies , Then the direction values are assigned to the copied feature points respectively , A feature point produces multiple coordinates 、 The scales are equal , But in different directions .
Generating feature descriptions
After finishing the gradient calculation of the key points , Use histogram to count the gradient and direction of pixels in the neighborhood .

In order to ensure the rotation invariance of the feature vector , Focus on feature points , Rotate the axis in the neighborhood θ angle , That is, the coordinate axis is rotated to the main direction of the feature point .

The main direction after rotation is the center 8x8 The window of , Find the gradient amplitude and direction of each pixel , The direction of the arrow represents the direction of the gradient , The length represents the gradient amplitude , Then the Gaussian window is used to weight it , At the end of each 4x4 Draw on a small piece of 8 Gradient histogram in three directions , Calculate the cumulative value of each gradient direction , A seed point can be formed , That is, each feature is represented by 4 It is composed of seed points , Each seed point has 8 Vector information in three directions .

It is suggested that each key point should be used 4x4 common 16 A seed point to describe , Such a key point will produce 128 Dimensional SIFT Eigenvector .

opencv SIFT function
import cv2
import numpy as np
import matplotlib.pyplot as plt#Matplotlib yes RGB
img = cv2.imread('test_1.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
def cv_show(img,name):
b,g,r = cv2.split(img)
img_rgb = cv2.merge((r,g,b))
plt.imshow(img_rgb)
plt.show()
def cv_show1(img,name):
plt.imshow(img)
plt.show()
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows()
cv2.__version__ #3.4.1.15 pip install opencv-python==3.4.1.15 pip install opencv-contrib-python==3.4.1.15
'3.4.1'
Get the feature point
sift = cv2.xfeatures2d.SIFT_create()
kp = sift.detect(gray, None)
img = cv2.drawKeypoints(gray, kp, img)
cv_show(img,'drawKeypoints')
# cv2.imshow('drawKeypoints', img)
# cv2.waitKey(0)
# cv2.destroyAllWindows()
Calculating characteristics
kp, des = sift.compute(gray, kp)
print (np.array(kp).shape)
(6827,)
des.shape
(6827, 128)
des[0]
array([ 0., 0., 0., 0., 0., 0., 0., 0., 21., 8., 0.,
0., 0., 0., 0., 0., 157., 31., 3., 1., 0., 0.,
2., 63., 75., 7., 20., 35., 31., 74., 23., 66., 0.,
0., 1., 3., 4., 1., 0., 0., 76., 15., 13., 27.,
8., 1., 0., 2., 157., 112., 50., 31., 2., 0., 0.,
9., 49., 42., 157., 157., 12., 4., 1., 5., 1., 13.,
7., 12., 41., 5., 0., 0., 104., 8., 5., 19., 53.,
5., 1., 21., 157., 55., 35., 90., 22., 0., 0., 18.,
3., 6., 68., 157., 52., 0., 0., 0., 7., 34., 10.,
10., 11., 0., 2., 6., 44., 9., 4., 7., 19., 5.,
14., 26., 37., 28., 32., 92., 16., 2., 3., 4., 0.,
0., 6., 92., 23., 0., 0., 0.], dtype=float32)
Image features -harris Corner detection

The basic principle






cv2.cornerHarris()
- img: The data type is float32 Into the image of
- blockSize: The size of the specified area in corner detection
- ksize: Sobel Window size used in derivation
- k: The value parameter is [0,04,0.06]
import cv2
import numpy as np
import matplotlib.pyplot as plt#Matplotlib yes RGB
img = cv2.imread('chessboard.jpg')
print ('img.shape:',img.shape)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# gray = np.float32(gray)
dst = cv2.cornerHarris(gray, 2, 3, 0.04)
print ('dst.shape:',dst.shape)
img.shape: (512, 512, 3)
dst.shape: (512, 512)
def cv_show(img,name):
b,g,r = cv2.split(img)
img_rgb = cv2.merge((r,g,b))
plt.imshow(img_rgb)
plt.show()
def cv_show1(img,name):
plt.imshow(img)
plt.show()
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows()
img[dst>0.01*dst.max()]=[255,255,255]
cv_show(img,'dst')
# cv2.imshow('dst',img)
# cv2.waitKey(0)
# cv2.destroyAllWindows()

Feature matching
Brute-Force Brute force match
import cv2
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
img1 = cv2.imread('box.png', 0)
img2 = cv2.imread('box_in_scene.png', 0)
def cv_show(img,name):
b,g,r = cv2.split(img)
img_rgb = cv2.merge((r,g,b))
plt.imshow(img_rgb)
plt.show()
def cv_show1(img,name):
plt.imshow(img)
plt.show()
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows()
cv_show1(img1,'img1')

cv_show1(img2,'img2')

sift = cv2.xfeatures2d.SIFT_create()
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None)
# crossCheck It means that two feature points should match each other , for example A No i Characteristic points and B No j The nearest feature point , also B No j Feature points to A No i The feature points are also
#NORM_L2: Normalized array of ( Euclid distance ), If other feature calculation methods need to consider different matching calculation methods
bf = cv2.BFMatcher(crossCheck=True) # Brute force match
1 Yes 1 The matching of
matches = bf.match(des1, des2)
matches = sorted(matches, key=lambda x: x.distance)# Sort
img3 = cv2.drawMatches(img1, kp1, img2, kp2, matches[:10], None,flags=2)
cv_show(img3,'img3')

k For the best match
bf = cv2.BFMatcher()
matches = bf.knnMatch(des1, des2, k=2)#1 Yes K matching
good = []
for m, n in matches:
if m.distance < 0.75 * n.distance:
good.append([m])
img3 = cv2.drawMatchesKnn(img1,kp1,img2,kp2,good,None,flags=2)
cv_show(img3,'img3')

If you need to complete the operation more quickly , You can try to use cv2.FlannBasedMatcher
Random sampling consistency algorithm (Random sample consensus,RANSAC)

Select the initial sample points for fitting , Given a tolerance range , Keep iterating

After each fitting , There are corresponding data points within the tolerance range , Find out the situation with the largest number of data points , Is the final fitting result

Homography matrix

边栏推荐
- 保证生产安全!广州要求危化品企业“不安全不生产、不变通”
- Zabbix API与PHP的配置
- MongoDB第二话 -- MongoDB高可用集群实现
- opencv学习笔记四--银行卡号识别
- 关于软件测试的一些思考
- Digital transformation: data visualization enables sales management
- En utilisant le paquet npoi de net Core 6 c #, lisez Excel.. Image dans la cellule xlsx et stockée sur le serveur spécifié
- Cannot link redis when redis is enabled
- Use the npoi package of net core 6 C to read excel Pictures in xlsx cells and stored to the specified server
- The data in the database table recursively forms a closed-loop data. How can we get these data
猜你喜欢
![[dynamic programming] p1004 grid access (four-dimensional DP template question)](/img/3a/3b82a4d9dcc25a3c9bf26b6089022f.jpg)
[dynamic programming] p1004 grid access (four-dimensional DP template question)
![[Verilog quick start of Niuke question series] ~ use functions to realize data size conversion](/img/e1/d35e1d382e0e945849010941b219d3.png)
[Verilog quick start of Niuke question series] ~ use functions to realize data size conversion

关于重载运算符的再整理

Task.Run(), Task.Factory.StartNew() 和 New Task() 的行为不一致分析

【牛客网刷题系列 之 Verilog快速入门】~ 多功能数据处理器、求两个数的差值、使用generate…for语句简化代码、使用子模块实现三输入数的大小比较

微信网页订阅消息实现

问题随记 —— Oracle 11g 卸载

Basic operations of SQL database

Internet hospital system source code hospital applet source code smart hospital source code online consultation system source code
![[零基础学IoT Pwn] 复现Netgear WNAP320 RCE](/img/f7/d683df1d4b1b032164a529d3d94615.png)
[零基础学IoT Pwn] 复现Netgear WNAP320 RCE
随机推荐
Ensure production safety! Guangzhou requires hazardous chemical enterprises to "not produce in an unsafe way, and keep constant communication"
Digital transformation: data visualization enables sales management
The data in the database table recursively forms a closed-loop data. How can we get these data
Blog recommendation | in depth study of message segmentation in pulsar
Basic operation of database
Rearrangement of overloaded operators
Semiconductor foundation of binary realization principle
数据产品经理需要掌握哪些数据能力?
Take you to API development by hand
IDEA全局搜索快捷键(ctrl+shift+F)失效修复
[zero basic IOT pwn] reproduce Netgear wnap320 rce
JVM performance tuning and practical basic theory part II
Opencv mat class
opencv学习笔记六--图像拼接
cmake 基本使用过程
关于软件测试的一些思考
2022-2-15 learning xiangniuke project - Section 4 business management
MIT team used graph neural network to accelerate the screening of amorphous polymer electrolytes and promote the development of next-generation lithium battery technology
竣达技术丨室内空气环境监测终端 pm2.5、温湿度TVOC等多参数监测
What are the requirements for NPDP product manager international certification registration?