当前位置:网站首页>一文读懂AGV的关键技术——激光SLAM与视觉SLAM的区别
一文读懂AGV的关键技术——激光SLAM与视觉SLAM的区别
2022-07-02 12:46:00 【小白学视觉】
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达移动机器人(AGV)是工业机器人的一种。它由计算机控制,具有移动、自动导航、多传感器控制、网络交互等功能,在实际生产中最主要的用途是搬运,可以说只要有搬运需求的地方,就有移动机器人的应用可能。

近年来,移动机器人技术在世界范围内得到快速发展。人们致力于把移动机器人应用于各种场景中,从室内外搬运机器人,到服务型机器人,再到工业机器人等,移动机器人的运用都得到了巨大突破。
在移动机器人研究中一个最关键的技术就是即时定位和建图,也就是所谓的SLAM技术。SLAM它试图解决这样的问题:一个机器人在未知的环境中运动,如何通过对环境的观测确定自身的运动轨迹,同时构建出环境的地图。
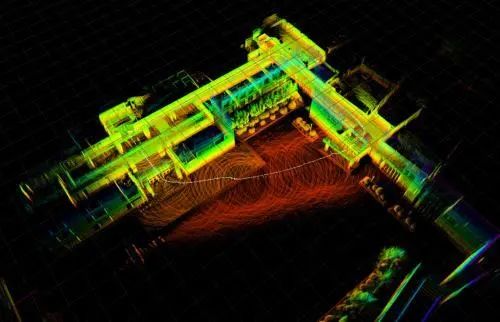
SLAM技术正是为了实现这个目标涉及到的诸多技术的总和。由于其重要的理论与应用价值,被很多学者认为是实现真正全自主移动机器人的关键。

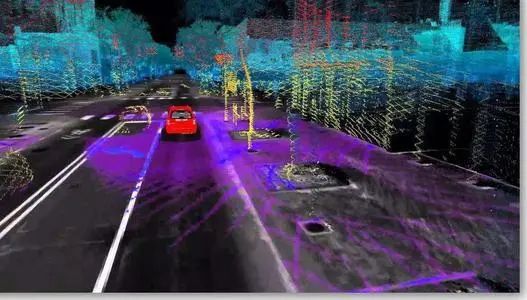
按照核心的功能模块来区分,目前常见的移动机器人SLAM系统一般具有两种形式:基于激光雷达的SLAM(激光SLAM)和基于视觉的SLAM(Visual SLAM或VSLAM)。
那么激光SLAM与视觉SLAM到底有何不同呢?看下面这个表格就一目了然啦~
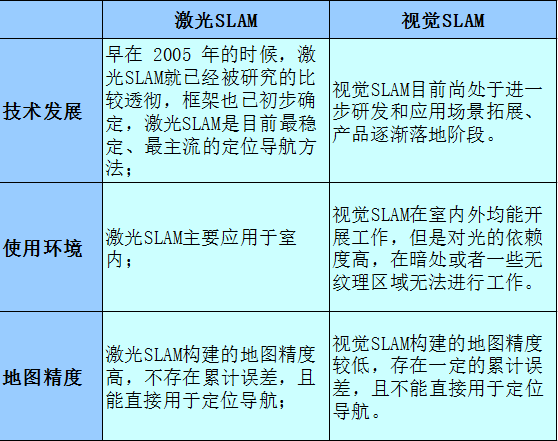
激光SLAM与视觉SLAM比较
通过对比我们发现,激光SLAM和视觉SLAM各擅胜场。两者相较,激光 SLAM 构建的地图精度高,不存在累计误差,且能直接用于定位导航。

当然,激光SLAM也有一定的局限性。比如在又长又直、两侧是墙壁的长廊或是动态变化大的环境中,单纯依靠激光SLAM容易发生定位丢失的情况。
其实,要想让移动机器人应对各种复杂的使用场景,激光SLAM与视觉SLAM必将在相互竞争和融合中发展,多传感器融合导航必然是未来发展方向。伴随移动机器人核心技术的解决,将替代人工完成简单、重复、劳动量大的繁杂工作,真正为人类服务。

好消息!
小白学视觉知识星球
开始面向外开放啦

下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~边栏推荐
- Bean configuration override in boot
- Boot 连接 Impala数据库
- /Bin/ld: cannot find -lpam
- 请问怎么在oracle视图中使用stustr函数
- AWS virtual machine expansion
- win10系统升级一段时间后,内存占用过高
- By asp Net core downloads files according to the path exception
- Traversal before, during and after binary tree
- After the win10 system is upgraded for a period of time, the memory occupation is too high
- Register as a harmonios developer and install deveco studio 3.0 beta2 for harmonios
猜你喜欢

Teach you how to build virtual machines locally and deploy microservices
Nebula Graph & 数仓血缘关系数据的存储与读写

理想之光不灭

Introduction to dynamic planning I, BFS of queue (70.121.279.200)

华为云服务器安装mysqlb for mysqld.service failed because the control process exited with error code.See “sys
GraphX 图计算实践之模式匹配抽取特定子图

Maui学习之路(三)--Winui3深入探讨
原神2.6服务端下载以及搭建安装教程

The sea of stars hidden behind the nebula graph
JS learning notes - process control
随机推荐
Solve * * warning * *: your ApplicationContext is unlikely to start due to a @componentscan of the defau
2022最新最详细必成功的在Vscode中设置背景图、同时解决不受支持的问题
Boot 连接 Impala数据库
Sqlserver queries which indexes are underutilized
The difference and usage of calloc, malloc and realloc functions
微信v3native支付设置的结束时间处理办法
/Bin/ld: cannot find -lgssapi_ krb5
Ssh/scp does not prompt all activities are monitored and reported
Route service grid traffic through two-level gateway design
Flink real-time data warehouse (IX): incremental synchronization of data in MySQL
Experiment collection of University Course "Fundamentals of circuit analysis". Experiment 5 - Research on equivalent circuit of linear active two terminal network
[Yu Yue education] reference materials of sensing and intelligent control technology of Nanjing University of Technology
处理gzip: stdin: not in gzip formattar: Child returned status 1tar: Error is not recoverable: exitin
[Xiaobai chat cloud] suggestions on container transformation of small and medium-sized enterprises
Bone conduction non ear Bluetooth headset brand, bone conduction Bluetooth headset brand recommendation
Usage of group by
SQL modification statement
Idea public method extraction shortcut key
Lseek error
Register as a harmonios developer and install deveco studio 3.0 beta2 for harmonios