当前位置:网站首页>Binocular 3D perception (I): preliminary understanding of binocular
Binocular 3D perception (I): preliminary understanding of binocular
2022-06-25 15:36:00 【anthony-36】
Binocular 3D perception ( One ): A preliminary understanding of binocular
advantage :
- Monocular 3D Perception depends on prior knowledge and geometric constraints
- Deep learning algorithms are very dependent on the size of the data set 、 Quality and diversity
- The binocular system solves the ambiguity caused by perspective transformation
- Binocular perception does not depend on the results of object detection , It is effective for any obstacle
Inferiority :
- Hardware : The camera needs to be accurately registered , The correctness of registration shall also be maintained during vehicle operation
- Software : The algorithm needs to process data from two cameras at the same time , High computational complexity
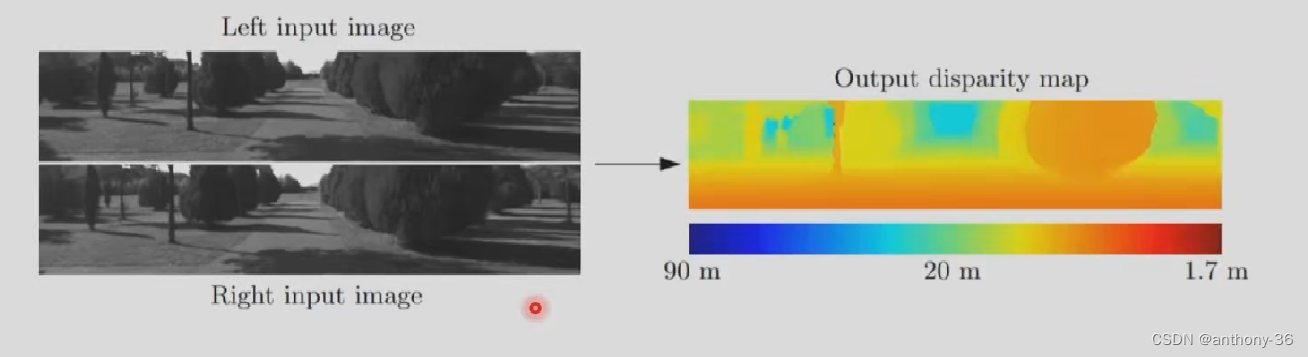
Binocular depth estimation

The basic principle
1. Concepts and formulas
B: Baseline length ( The distance between two cameras )
f: The focal length of the camera
d: parallax ( The same one on the left and right images 3D The distance between the points )
f and B Is constant , Required solution depth z, Just estimate the parallax d(xl-xr)
root According to the phase like 3、 ... and horn shape , have to To { f / z = x l / x f / z = x r / x − B only Yes x and z yes not know change The amount According to the similar triangle , obtain \begin{cases} f/z=xl/x\\ f/z=xr/x-B \end{cases} \\ Only x and z It's an unknown variable root According to the phase like 3、 ... and horn shape , have to To { f/z=xl/xf/z=xr/x−B only Yes x and z yes not know change The amount
We get the following formula :
Z = f B / d Z=fB/d Z=fB/d
2. Disparity estimation : For each pixel in the left figure . You need to find the matching point in the right figure .
- For each possible parallax ( Limited scope ), Calculate matching error , Therefore, the obtained three-dimensional error data is called Cost Volume.、
- When calculating the matching error, consider the local area near the pixel , For example, sum the differences of all corresponding pixel values in the local area .
- adopt Cost Volume You can get the parallax at each pixel ( Corresponding to the minimum matching error ), So we can get the depth value .
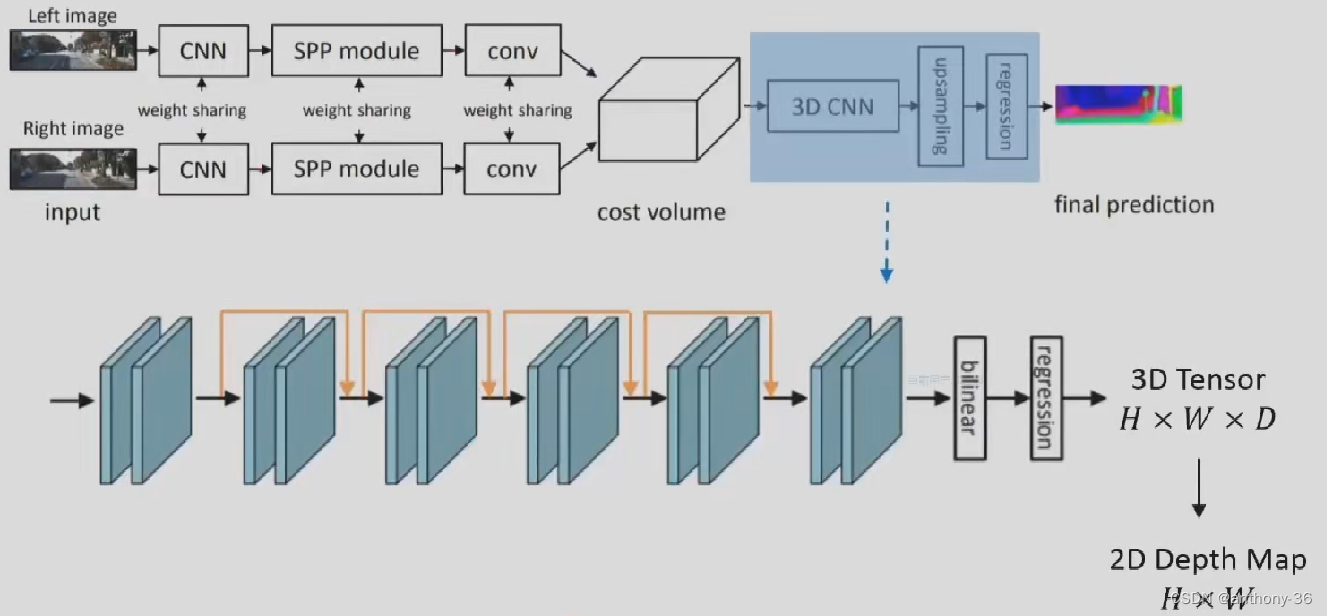
PSMNET
1. The shared convolution network is used for feature extraction on the left and right images
- Including down sampling , Pyramid structure and hole convolution are used to extract multi-resolution information and expand receptive field
2. Left and right feature map construction Cost Volume
3.3D Convolution is used to extract information between left and right feature maps and different parallax levels
4. Upsampling to original resolution , Find the parallax value with the smallest matching error
5. The process



6. Result analysis (KITTI Data sets )
- There is an error between the object and the background

Cause analysis : Although features contain neighborhood information , But it lacks the supervisory signal of high-level semantic information , Unable to understand the scene .
How to improve : The results of object detection and semantic segmentation are used for post-processing , Or multiple tasks
- Error due to long distance

| distance | 0-10m | 10-30m | 30-60m | 60-inf | 0-inf |
|---|---|---|---|---|---|
| Depth error (RMSE) | 0.268 | 1.203 | 6.056 | 16.604 | 2.605 |
Cause analysis : The parallax value at a long distance is small , It is difficult to distinguish between discrete image pixels
Z = f B / d Z=fB/d Z=fB/d
How to improve :① Improve the spatial resolution of the image ( long-focus ), It makes the distant objects have more pixel coverage
② Increase baseline length , Thus increasing the range of parallax
- Areas of low texture or low light , The error of depth estimation is large

Cause analysis : Features cannot be effectively extracted in this region , Used to calculate the matching error
How to improve : Improve the dynamic range of the camera , Or use a sensor that can measure distance
The specific simulation process is recorded in the next chapter .
边栏推荐
- The situation and suggestions of a software engineering associate graduate who failed in the postgraduate entrance examination
- Summary of regularization methods
- 到底要不要去外包公司?这篇带你全面了解外包那些坑!
- Is it safe to open an account for new bonds? What preparations are needed
- Ten routing strategies for distributed task scheduling platform XXL job
- Is Guoxin golden sun reliable? Is it legal? Is it safe to open a stock account?
- Several relationships of UML
- How to download and install Weka package
- Could not connect to redis at 127.0.0.1:6379 in Windows
- Error com mysql. cj. jdbc. exceptions. Communicationsexception: solutions to communications link failure
猜你喜欢

剑指 Offer 09. 用两个栈实现队列
QT source code online view
Learning C language today is the first time to learn C language. In college, C linguistics is not good, but I want to make progress, so I found a beep video on the Internet to learn C language
(2) Relational database

Several common optimization methods
![[paper notes] street view change detection with deconvolutional networks](/img/2d/777fd0d85ff4d349516b95923410fd.jpg)
[paper notes] street view change detection with deconvolutional networks

Data feature analysis skills - correlation test

Single user mode

Simulating Sir disease transmission model with netlogo

Download and installation tutorial of consumer
随机推荐
CPU over high diagnosis and troubleshooting
CV pre training model set
Agent and classloader
Leetcode121 timing of buying and selling stocks
Finally, we can figure out whether the binding event in the tag is bracketed or not
Several common optimization methods
About%*s and%* s
How to download and install Weka package
Using R language in jupyter notebook
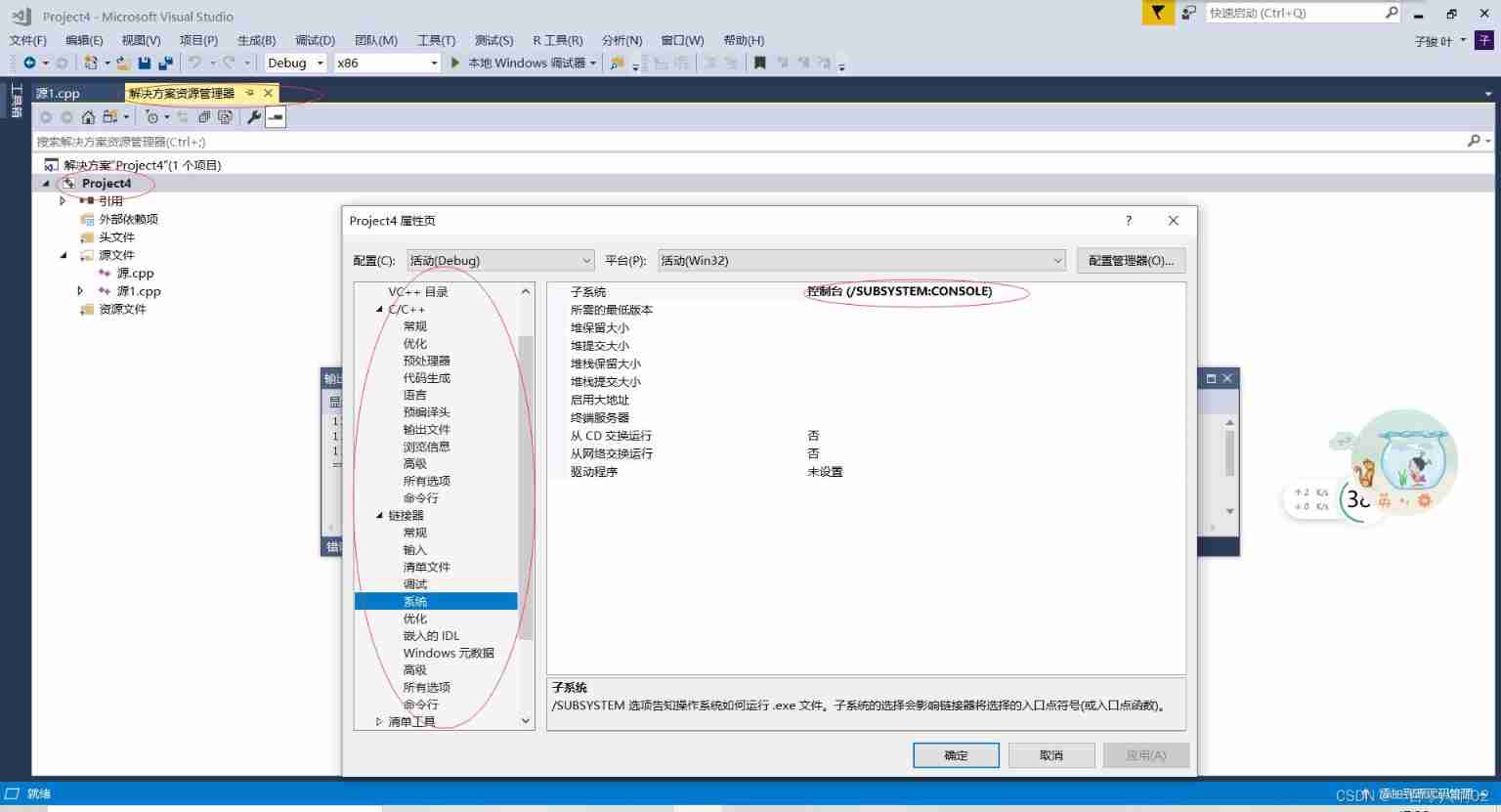
Using Visual Studio
5 connection modes of QT signal slot
Netlogo learning
golang正则regexp包使用-05-扩展Expand()、根据正则切割Split()
Core mode and immediate rendering mode of OpenGL
Distributed transaction solution
The robot is playing an old DOS based game
Arthas source code learning-1
[paper notes] overview of case segmentation
Several solutions to the distributed lock problem in partial Internet companies
04. binary tree