当前位置:网站首页>Moveit2 - 5. Scenario Planning
Moveit2 - 5. Scenario Planning
2022-07-27 11:23:00 【babyrtsh .】
Scenario Planning
PlanningScene Class provides the main interface for collision detection and constraint detection . In this tutorial , Will explore this class C++ Interface .
Complete code
The complete code of this tutorial can be found in Here MoveIt GitHub project see .
Set up
have access to RobotModel or URDF and SRDF To easily set up and configure PlanningScene class . however , This is not instantiation PlanningScene The recommended method .PlanningSceneMonitor( It will be introduced in detail in the next tutorial ) It is a recommended method to use robot joints and sensor data on the robot to create and maintain the current planning scene . In this tutorial , Will directly instantiate a PlanningScene class , But this instantiation method is only for demonstration purposes .
robot_model_loader::RobotModelLoader robot_model_loader(planning_scene_tutorial_node, "robot_description");
const moveit::core::RobotModelPtr& kinematic_model = robot_model_loader.getModel();
planning_scene::PlanningScene planning_scene(kinematic_model);
Self collision detection
The first thing we need to do is to detect whether the robot in the current state is in a self collision state , That is, whether the current configuration of the robot will cause the collision between various parts of the robot . So , Will construct a CollisionRequest Object and a CollisionResult Object and pass them to the collision detection function . Please note that , Whether the robot self collides will be included in the detection result . Self collision detection uses unfilled (unpadded) Version of robot , I.e. direct use URDF Collision mesh provided in without adding additional padding .
collision_detection::CollisionRequest collision_request;
collision_detection::CollisionResult collision_result;
planning_scene.checkSelfCollision(collision_request, collision_result);
RCLCPP_INFO_STREAM(LOGGER, "Test 1: Current state is " << (collision_result.collision ? "in" : "not in") << " self collision");
Change state
Now? , Let's change the current state of the robot . The planning scenario will maintain the current state of the robot internally . We can get a reference to the current state and change it , Then collision detection is carried out for the new configuration of the robot . Please pay special attention , Clear before sending a new collision detection request collision_result The object is worth .
moveit::core::RobotState& current_state = planning_scene.getCurrentStateNonConst();
current_state.setToRandomPositions();
collision_result.clear();
planning_scene.checkSelfCollision(collision_request, collision_result);
RCLCPP_INFO_STREAM(LOGGER, "Test 2: Current state is " << (collision_result.collision ? "in" : "not in") << " self collision");
Perform collision detection on the planning group
Now? , We will only deal with Panda Robot hands for collision detection , It will check whether there is any collision between the robot's hand and other parts of the robot's body . We can add the planning group name to the collision request “hand” To specifically request this .
collision_request.group_name = "hand";
current_state.setToRandomPositions();
collision_result.clear();
planning_scene.checkSelfCollision(collision_request, collision_result);
RCLCPP_INFO_STREAM(LOGGER, "Test 3: Current state is " << (collision_result.collision ? "in" : "not in") << " self collision");
Get contact information
First , Manual will Panda The arm of the robot (arm) Set it to a position inside that knows that self collision will indeed occur . Please note that , This state is now actually beyond Panda Robot joint limitations , This can also be checked directly .
std::vector<double> joint_values = {
0.0, 0.0, 0.0, -2.9, 0.0, 1.4, 0.0 };
const moveit::core::JointModelGroup* joint_model_group = current_state.getJointModelGroup("panda_arm");
current_state.setJointGroupPositions(joint_model_group, joint_values);
RCLCPP_INFO_STREAM(LOGGER, "Test 4: Current state is "
<< (current_state.satisfiesBounds(joint_model_group) ? "valid" : "not valid"));
Now? , Can be obtained in Panda Contact information of any collision that may occur under the given configuration of the robot arm . Contact information can be requested by filling in the appropriate fields in the collision request and specifying the maximum number of contacts to return .
collision_request.contacts = true;
collision_request.max_contacts = 1000;
collision_result.clear();
planning_scene.checkSelfCollision(collision_request, collision_result);
RCLCPP_INFO_STREAM(LOGGER, "Test 5: Current state is " << (collision_result.collision ? "in" : "not in") << " self collision");
collision_detection::CollisionResult::ContactMap::const_iterator it;
for (it = collision_result.contacts.begin(); it != collision_result.contacts.end(); ++it)
{
RCLCPP_INFO(LOGGER, "Contact between: %s and %s", it->first.first.c_str(), it- >first.second.c_str());
}
Modify the allowable collision matrix
AllowedCollisionMatrix (ACM) Provides a mechanism to tell the collision world to ignore collisions between specific objects : Specific objects can be components of robots and various objects in the robot world . You can tell the collision detector to ignore all collisions between links reported above , in other words , Even if these links are actually in a collision state , The collision detector will also ignore these collisions , And return the non collision state for this specific state of the robot . In addition, we need to pay attention to how we copy the allowable collision matrix and current state in this example and pass them to the collision detection function .
collision_detection::AllowedCollisionMatrix acm = planning_scene.getAllowedCollisionMatrix();
moveit::core::RobotState copied_state = planning_scene.getCurrentState();
collision_detection::CollisionResult::ContactMap::const_iterator it2;
for (it2 = collision_result.contacts.begin(); it2 != collision_result.contacts.end(); ++it2)
{
acm.setEntry(it2->first.first, it2->first.second, true);
}
collision_result.clear();
planning_scene.checkSelfCollision(collision_request, collision_result, copied_state, acm);
RCLCPP_INFO_STREAM(LOGGER, "Test 6: Current state is " << (collision_result.collision ? "in" : "not in") << " self collision");
Complete collision detection
Although self collision detection has been carried out in the past , But you can use checkCollision Function for self collision detection and environment ( Currently empty ) Collision detection based on . This is the most commonly used set of collision detection functions in planners . Please note that , Collision detection with the environment will use the filled version of the robot . Filling helps keep robots away from obstacles in the environment .
collision_result.clear();
planning_scene.checkCollision(collision_request, collision_result, copied_state, acm);
RCLCPP_INFO_STREAM(LOGGER, "Test 7: Current state is " << (collision_result.collision ? "in" : "not in") << " self collision");
Constraint detection
PlanningScene Class also includes easy-to-use constraint detection function calls . There are two types of constraints :(a) from KinematicConstraint Set the selected constraints , namely JointConstraint、PositionConstraint、OrientationConstraint and VisibilityConstraint as well as (b) User defined constraint specified by callback function . Let's first look at a simple KinematicConstraint An example of .
Detect kinematic constraints
First of all, we will talk about Panda Robotic panda_arm Define a simple position and orientation constraint on the end effector of the planning group . Note the convenience function for filling constraints ( These functions can be found in moveit_core Package's kinematic_constraints In the catalog utils.h Found in file ).
std::string end_effector_name = joint_model_group->getLinkModelNames().back();
geometry_msgs::msg::PoseStamped desired_pose;
desired_pose.pose.orientation.w = 1.0;
desired_pose.pose.position.x = 0.3;
desired_pose.pose.position.y = -0.185;
desired_pose.pose.position.z = 0.5;
desired_pose.header.frame_id = "panda_link0";
moveit_msgs::msg::Constraints goal_constraint =
kinematic_constraints::constructGoalConstraints(end_effector_name, desired_pose);
Now? , have access to PlanningScene Class isStateConstrained Function to detect the state of this constraint .
copied_state.setToRandomPositions();
copied_state.update();
bool constrained = planning_scene.isStateConstrained(copied_state, goal_constraint);
RCLCPP_INFO_STREAM(LOGGER, "Test 8: Random state is " << (constrained ? "constrained" : "not constrained"));
There is a more effective constraint detection method ( For example, when you need to detect the same constraint again and again in a planner ). First build a KinematicConstraintSet, It will be right ROS Constrain the message to preprocess and set it up for fast processing .
kinematic_constraints::KinematicConstraintSet kinematic_constraint_set(kinematic_model);
kinematic_constraint_set.add(goal_constraint, planning_scene.getTransforms());
bool constrained_2 = planning_scene.isStateConstrained(copied_state, kinematic_constraint_set);
RCLCPP_INFO_STREAM(LOGGER, "Test 9: Random state is " << (constrained_2 ? "constrained" : "not constrained"));
There is a use KinematicConstraintSet Direct methods of classes can do this :
kinematic_constraints::ConstraintEvaluationResult constraint_eval_result = kinematic_constraint_set.decide(copied_state);
RCLCPP_INFO_STREAM(LOGGER, "Test 10: Random state is "
<< (constraint_eval_result.satisfied ? "constrained" : "not constrained"));
User defined constraints
User defined constraints can also be assigned to PlanningScene class . This is by using setStateFeasibilityPredicate Function specifies a callback function to complete . The following is a simple example of a user-defined callback function , This callback function is used to detect Panda Robotic “panda_joint1” Is it at a positive angle or a negative angle :
bool stateFeasibilityTestExample(const moveit::core::RobotState& kinematic_state, bool /*verbose*/)
{
const double* joint_values = kinematic_state.getJointPositions("panda_joint1");
return (joint_values[0] > 0.0);
}
Now? , Whenever you call isStateFeasible function , Will call this user-defined callback function .
planning_scene.setStateFeasibilityPredicate(stateFeasibilityTestExample);
bool state_feasible = planning_scene.isStateFeasible(copied_state);
RCLCPP_INFO_STREAM(LOGGER, "Test 11: Random state is " << (state_feasible ? "feasible" : "not feasible"));
Whenever you call isStateValid when , Three tests will be carried out :(a) collision detection ;(b) Constraint detection ; Use the user-defined callback function for feasibility detection .
bool state_valid = planning_scene.isStateValid(copied_state, kinematic_constraint_set, "panda_arm");
RCLCPP_INFO_STREAM(LOGGER, "Test 12: Random state is " << (state_valid ? "valid" : "not valid"));
Please note that ,MoveIt2 and OMPL All available planners in currently perform collision detection 、 Constraint detection and feasibility detection using user-defined callback functions .
launch file
The complete startup file is in GitHub On the website here . All the code in this tutorial can be downloaded from moveit_tutorials Compile and run in the software package .
Run code
have access to ros2 launch Command directly from moveit_tutorials The startup file in the software package runs the code :
ros2 launch moveit2_tutorials planning_scene_tutorial.launch.py
Expected output
The output should look like this , But because we use random joint values , So the output may be different .
moveit2_tutorials: Test 1: Current state is in self collision
moveit2_tutorials: Test 2: Current state is not in self collision
moveit2_tutorials: Test 3: Current state is not in self collision
moveit2_tutorials: Test 4: Current state is valid
moveit2_tutorials: Test 5: Current state is in self collision
moveit2_tutorials: Contact between: panda_leftfinger and panda_link1
moveit2_tutorials: Contact between: panda_link1 and panda_rightfinger
moveit2_tutorials: Test 6: Current state is not in self collision
moveit2_tutorials: Test 7: Current state is not in self collision
moveit2_tutorials: Test 8: Random state is not constrained
moveit2_tutorials: Test 9: Random state is not constrained
moveit2_tutorials: Test 10: Random state is not constrained
moveit2_tutorials: Test 11: Random state is feasible
moveit2_tutorials: Test 12: Random state is not valid
边栏推荐
- 记忆化搜索 AcWing 901. 滑雪
- Find the combination number acwing 888. find the combination number IV
- Game theory acwing 894. Split Nim game
- 01 BTC cryptology principle
- Find the combination number acwing 886. find the combination number II
- IO流_字符流、IO流小结、IO流案例总结
- What changes will metauniverse bring to the music industry in the trillion market?
- (4) Operator
- 数字三角形模型 AcWing 1015. 摘花生
- Solutions to errors in tensorflow operation
猜你喜欢

Instructions for mock platform

背包问题 AcWing 9. 分组背包问题
Digital triangle model acwing 1015. Picking flowers
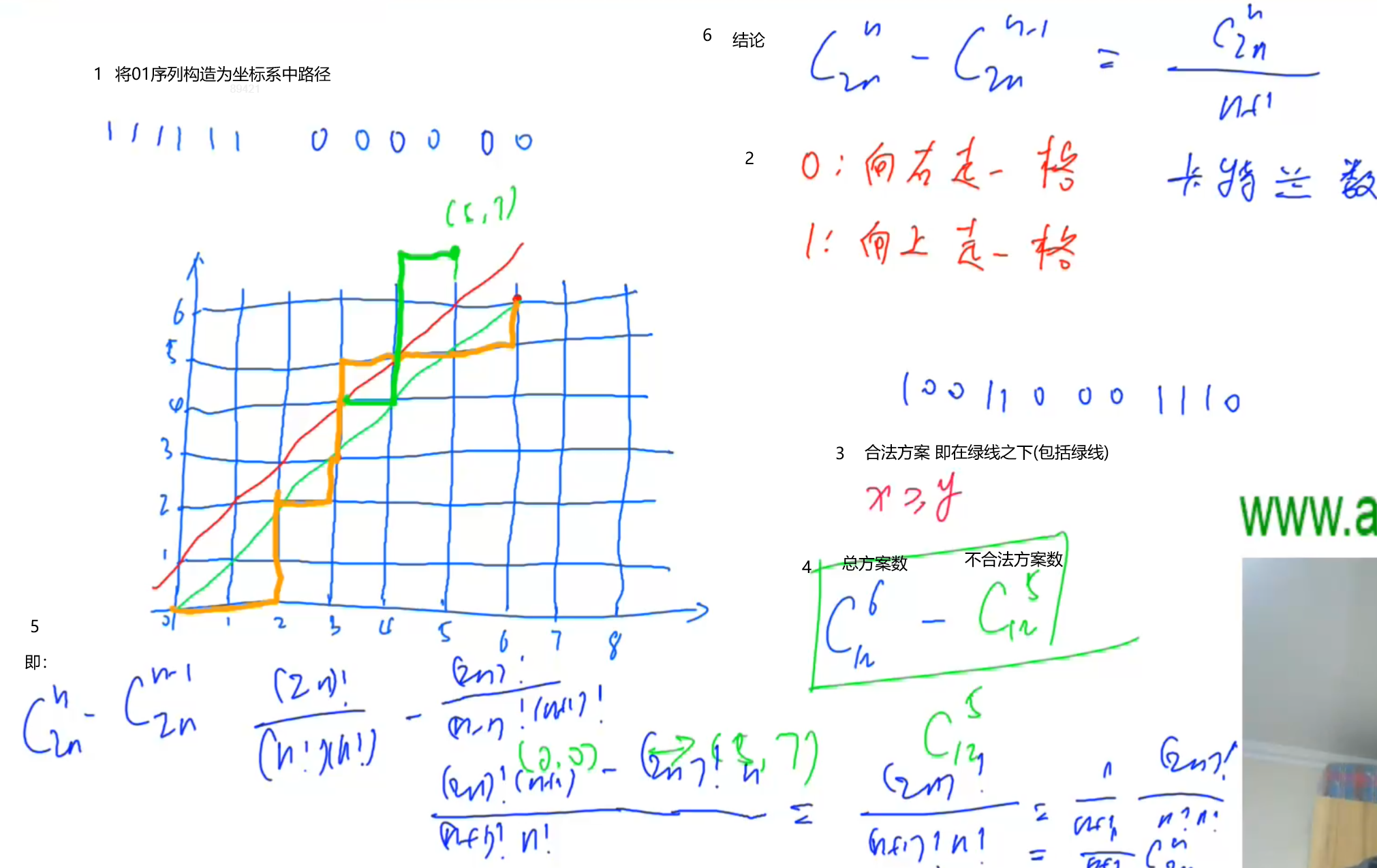
Find the combinatorial number acwing 889. 01 sequence satisfying the condition

Based on the open source stream batch integrated data synchronization engine Chunjun data restore DDL parsing module actual combat sharing
Cancer DDD

FAQs of "relay chain" and "dot" in Poka ecosystem

最长上升子序列模型 AcWing 1016. 最大上升子序列和

Longest ascending subsequence model acwing 1010. Interceptor missile

Installation and use of GTEST and gmock
随机推荐
Tensorflow tensor operation function set
Digital triangle model acwing 1018. Minimum toll
Redis+caffeine two-level cache enables smooth access speed
11 wrong set
2022牛客多校 (3)J.Journey
Find the combination number acwing 888. find the combination number IV
Yum source installation
Tree DP acwing 285. dance without boss
C language 2: find the maximum value of three numbers, find the middle value of three numbers, and write program steps
Markdown editor syntax - setting of text color, size, font and background color (Reprint)
Find the combinatorial number acwing 889. 01 sequence satisfying the condition
Knapsack model acwing 1024. Packing problem
SQL Server2000 database error
4 search insertion location
Verilog implementation of ECG signal acquisition, storage and transmission system based on FPGA
Longest ascending subsequence model acwing 1010. Interceptor missile
The longest ascending subsequence model acwing 1017. The glider wing of the strange thief Kidd
"My" bug collection (Reprinted)
State compression DP acwing 91. shortest Hamilton path
Thank you for your likes and attention