当前位置:网站首页>Pytorch visualization
Pytorch visualization
2022-07-25 12:21:00 【Alexa2077】
One , Visual network structure
In order to conveniently and intuitively view the structure of deep neural network , Generally, the network structure is viewed in a visual way . This section describes how to use torchinfo To visualize the network structure .
1, Use print Function to print the basic information of the model
In this section , We will use ResNet18 Show the structure of :
import torchvision.models as models
model = models.resnet18()
Go through the two steps above , We get it resnet18 Model structure of . I'm learning torchinfo Before , Let's take a look at the direct print(model) Result :
ResNet(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): Bottleneck(
(conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
... ...
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(fc): Linear(in_features=2048, out_features=1000, bias=True)
)
We can find simple print(model), Only the information of basic components can be obtained , It can't show the of each layer shape, The size of the corresponding parameter quantity cannot be displayed , have access to torchinfo Solve this problem .
2, Use torchinfo Visual network structure
install :
# Installation method 1
pip install torchinfo
# Installation method II
conda install -c conda-forge torchinfo
Use : Just use **torchinfo.summary()** That's it , The required parameters are model,input_size[batch_size,channel,h,w], For more information, please refer to the link :https://github.com/TylerYep/torchinfo#documentation
Examples are as follows :
import torchvision.models as models
from torchinfo import summary
resnet18 = models.resnet18() # Instantiation model
summary(resnet18, (1, 3, 224, 224)) # 1:batch_size 3: The number of channels in the picture 224: The height and width of the picture
Output :torchinfo Provides more detailed information , Including module information ( The type of each floor 、 Output shape And parameter quantities )、 The parameter quantity of the whole model 、 The model size 、 Memory size required for a forward or reverse propagation, etc .
Two ,CNN visualization
Convolutional neural networks (CNN) It is a very important model structure in deep learning , but CNN It's a Black box model , People don't know CNN How to get better performance , This brings the interpretability of deep learning .
If you can understand CNN The way we work , People can not only explain the results obtained , Improve the robustness of the model , And it can be targeted to improve CNN To further improve the effect .
understand CNN An important step is visualization , Including how visual features are extracted 、 The form of the extracted features and the concerns of the model in the input data .
1,CNN Convolution kernel Visualization
Convolution kernel at CNN Is responsible for extracting features , Visual convolution kernel can help people understand CNN What features are extracted from each layer , Then understand the working principle of the model . For example, in Zeiler and Fergus 2013 Year of paper I studied it in CNN The convolution kernel of each layer is different , They found that The feature extracted from the layer close to the input is a relatively simple structure , The feature extracted from the layer close to the output is similar to the shape of the entity in the graph .
stay PyTorch It is also very convenient to visualize convolution kernel in , The core lies in the convolution kernel of a specific layer, that is, the model weight of a specific layer , The visual convolution kernel is equivalent to the weight matrix corresponding to the visualization . The following is given in PyTorch Implementation scheme of visual convolution kernel in , With torchvision Self contained VGG11 The model, for example .
First , Load model , And determine the layer information of the model :
import torch
from torchvision.models import vgg11
model = vgg11(pretrained=True)
print(dict(model.features.named_children()))
{
'0': Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'1': ReLU(inplace=True),
'2': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),
'3': Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'4': ReLU(inplace=True),
'5': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),
'6': Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'7': ReLU(inplace=True),
'8': Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'9': ReLU(inplace=True),
'10': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),
'11': Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'12': ReLU(inplace=True),
'13': Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'14': ReLU(inplace=True),
'15': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),
'16': Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'17': ReLU(inplace=True),
'18': Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'19': ReLU(inplace=True),
'20': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)}
Convolution kernel corresponds to convolution layer (Conv2d), Here is the first “3” Layer as an example , Visualize the corresponding parameters :
conv1 = dict(model.features.named_children())['3']
kernel_set = conv1.weight.detach()
num = len(conv1.weight.detach())
print(kernel_set.shape)
for i in range(0,num):
i_kernel = kernel_set[i]
plt.figure(figsize=(20, 17))
if (len(i_kernel)) > 1:
for idx, filer in enumerate(i_kernel):
plt.subplot(9, 9, idx+1)
plt.axis('off')
plt.imshow(filer[ :, :].detach(),cmap='bwr')
torch.Size([128, 64, 3, 3])
Due to the first “3” The characteristic diagram of the layer is composed of 64 Dimension becomes 128 dimension , So there is 128*64 Convolution kernels , The visualization effect of some convolution kernels is shown in the figure below :
2,CNN Visualization method of feature map
Corresponding to the convolution kernel , The data obtained by each convolution layer of the input original image is called Characteristics of figure , The purpose of visual convolution kernel is to see what features the model extracts , The visual feature map is to see what the features extracted by the model look like .
There are many ways to obtain feature maps , You can start with input , Forward propagation layer by layer , Return it to the desired feature map . Although this method is feasible , But there's some trouble . stay PyTorch in , A special interface is provided to enable the network to obtain the feature map in the process of forward propagation , The name of this interface is very vivid , be called hook. You can imagine a scene like this , Data travels forward through the network , At a certain layer of the network, we preset a hook , After data transmission, the hook will leave the appearance of data in this layer , Reading the information of the hook is the characteristic diagram of this layer . The specific implementation is as follows :
class Hook(object):
def __init__(self):
self.module_name = []
self.features_in_hook = []
self.features_out_hook = []
def __call__(self,module, fea_in, fea_out):
print("hooker working", self)
self.module_name.append(module.__class__)
self.features_in_hook.append(fea_in)
self.features_out_hook.append(fea_out)
return None
def plot_feature(model, idx, inputs):
hh = Hook()
model.features[idx].register_forward_hook(hh)
# forward_model(model,False)
model.eval()
_ = model(inputs)
print(hh.module_name)
print((hh.features_in_hook[0][0].shape))
print((hh.features_out_hook[0].shape))
out1 = hh.features_out_hook[0]
total_ft = out1.shape[1]
first_item = out1[0].cpu().clone()
plt.figure(figsize=(20, 17))
for ftidx in range(total_ft):
if ftidx > 99:
break
ft = first_item[ftidx]
plt.subplot(10, 10, ftidx+1)
plt.axis('off')
#plt.imshow(ft[ :, :].detach(),cmap='gray')
plt.imshow(ft[ :, :].detach())
Here we first implement a hook class , After the plot_feature Function , Will be hook Class is registered in a layer of the network to be visualized .model When forward propagation is carried out, it will call hook Of __call__ function , That's where we store the input and output of the current layer . there features_out_hook It's a list, One forward propagation at a time , Are called once , That is to say features_out_hook The length will increase 1
3,CNN class activation map Visualization methods
**class activation map(CAM)** The function of is to judge which variables are important to the model , stay CNN Visual scene , That is, it is important to judge which pixels in the image are important to the prediction result . In addition to identifying important pixels , People will also be interested in the gradient of important areas , So in CAM It has also been further improved on the basis of Grad-CAM( And many variants ).CAM and Grad-CAM An example of is shown in the figure below :
Compared with visual convolution kernel and visual feature graph ,CAM Series visualization is more intuitive , Be able to identify important areas at a glance , Then interpretability analysis or model optimization and improvement .CAM A series of operations can be implemented through the Open Source Toolkit pytorch-grad-cam To achieve .
install :
pip install grad-cam
routine :
import torch
from torchvision.models import vgg11,resnet18,resnet101,resnext101_32x8d
import matplotlib.pyplot as plt
from PIL import Image
import numpy as np
model = vgg11(pretrained=True)
img_path = './dog.png'
# resize The operation is to be consistent with the size of the training picture of the afferent neural network
img = Image.open(img_path).resize((224,224))
# You need to convert the original picture to np.float32 Format and in 0-1 Between
rgb_img = np.float32(img)/255
plt.imshow(img)
from pytorch_grad_cam import GradCAM,ScoreCAM,GradCAMPlusPlus,AblationCAM,XGradCAM,EigenCAM,FullGrad
from pytorch_grad_cam.utils.model_targets import ClassifierOutputTarget
from pytorch_grad_cam.utils.image import show_cam_on_image
target_layers = [model.features[-1]]
# Select the appropriate class activation diagram , however ScoreCAM and AblationCAM need batch_size
cam = GradCAM(model=model,target_layers=target_layers)
targets = [ClassifierOutputTarget(preds)]
# upper preds Need to set , such as ImageNet Yes 1000 class , This can be set to 200
grayscale_cam = cam(input_tensor=img_tensor, targets=targets)
grayscale_cam = grayscale_cam[0, :]
cam_img = show_cam_on_image(rgb_img, grayscale_cam, use_rgb=True)
print(type(cam_img))
Image.fromarray(cam_img)

4, Use FlashTorch Fast implementation CNN visualization
Open source tools are quickly implemented CNN visualization :FlashTorch:https://github.com/MisaOgura/flashtorch
install :
pip install flashtorch
Visual gradient :
# Download example images
# !mkdir -p images
# !wget -nv \
# https://github.com/MisaOgura/flashtorch/raw/master/examples/images/great_grey_owl.jpg \
# https://github.com/MisaOgura/flashtorch/raw/master/examples/images/peacock.jpg \
# https://github.com/MisaOgura/flashtorch/raw/master/examples/images/toucan.jpg \
# -P /content/images
import matplotlib.pyplot as plt
import torchvision.models as models
from flashtorch.utils import apply_transforms, load_image
from flashtorch.saliency import Backprop
model = models.alexnet(pretrained=True)
backprop = Backprop(model)
image = load_image('/content/images/great_grey_owl.jpg')
owl = apply_transforms(image)
target_class = 24
backprop.visualize(owl, target_class, guided=True, use_gpu=True)

Visualization convolution kernel :
import torchvision.models as models
from flashtorch.activmax import GradientAscent
model = models.vgg16(pretrained=True)
g_ascent = GradientAscent(model.features)
# specify layer and filter info
conv5_1 = model.features[24]
conv5_1_filters = [45, 271, 363, 489]
g_ascent.visualize(conv5_1, conv5_1_filters, title="VGG16: conv5_1")

Reference resources :
【1】https://andrewhuman.github.io/cnn-hidden-layout_search
【2】https://cloud.tencent.com/developer/article/1747222
【3】https://github.com/jacobgil/pytorch-grad-cam
【4】https://github.com/MisaOgura/flashtorch
3、 ... and , Use TensorBoard Visualize the training process
Use TensorBoard Visualize the training process , Be treated as a separate article ,
The article links :https://blog.csdn.net/Alexa_/article/details/125940977
This paper is about DataWhale- Explain profound theories in simple language Pytorch Group study notes !
边栏推荐
- Behind the screen projection charge: iqiyi's quarterly profit, is Youku in a hurry?
- selenium使用———安装、测试
- 氢能创业大赛 | 国家能源局科技司副司长刘亚芳:构建高质量创新体系是我国氢能产业发展的核心
- [untitled]
- Video caption (cross modal video summary / subtitle generation)
- 马斯克的“灵魂永生”:一半炒作,一半忽悠
- 【AI4Code】《Unified Pre-training for Program Understanding and Generation》 NAACL 2021
- 记录一次线上死锁的定位分析
- MySQL exercise 2
- 【微服务~Sentinel】Sentinel降级、限流、熔断
猜你喜欢
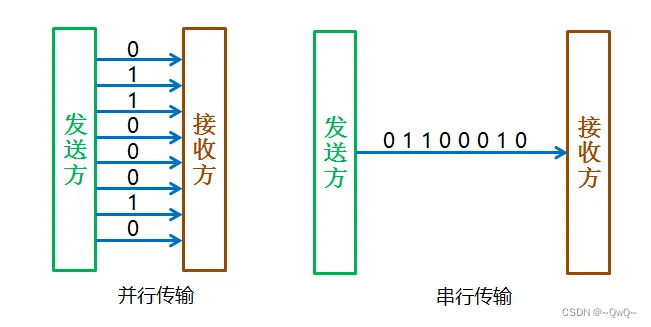
通信总线协议一 :UART

MySQL练习二

Fault tolerant mechanism record

2.1.2 机器学习的应用

【AI4Code】《Unified Pre-training for Program Understanding and Generation》 NAACL 2021

【图攻防】《Backdoor Attacks to Graph Neural Networks 》(SACMAT‘21)
![[micro service ~sentinel] sentinel degradation, current limiting, fusing](/img/60/448c5f40af4c0937814c243bd7cb04.png)
[micro service ~sentinel] sentinel degradation, current limiting, fusing
MySQL exercise 2

Those young people who left Netease

Atomic atomic class
随机推荐
Brpc source code analysis (II) -- the processing process of brpc receiving requests
After having a meal with trump, I wrote this article
[comparative learning] understanding the behavior of contractual loss (CVPR '21)
PyTorch可视化
Brpc source code analysis (V) -- detailed explanation of basic resource pool
Scott+scott law firm plans to file a class action against Yuga labs, or will confirm whether NFT is a securities product
Eureka注册中心开启密码认证-记录
Hydrogen entrepreneurship competition | Liu Yafang, deputy director of the science and Technology Department of the National Energy Administration: building a high-quality innovation system is the cor
【AI4Code】《IntelliCode Compose: Code Generation using Transformer》 ESEC/FSE 2020
aaaaaaaaaaA heH heH nuN
1.1.1 欢迎来到机器学习
Can't delete the blank page in word? How to operate?
给生活加点惊喜,做创意生活的原型设计师丨编程挑战赛 x 选手分享
嵌套事务 UnexpectedRollbackException 分析与事务传播策略
Communication bus protocol I: UART
Resttemplate and ribbon are easy to use
Implement anti-theft chain through referer request header
【AI4Code】《CoSQA: 20,000+ Web Queries for Code Search and Question Answering》 ACL 2021
Add a little surprise to life and be a prototype designer of creative life -- sharing with X contestants in the programming challenge
PyTorch进阶训练技巧