当前位置:网站首页>数据中台稳定性的“四高” | StartDT Tech Lab 18
数据中台稳定性的“四高” | StartDT Tech Lab 18
2022-06-23 11:59:00 【InfoQ】

0. 数据中台的“稳定性”是什么?
1. “高可用”的数据中台
2. “高并发”的数据中台

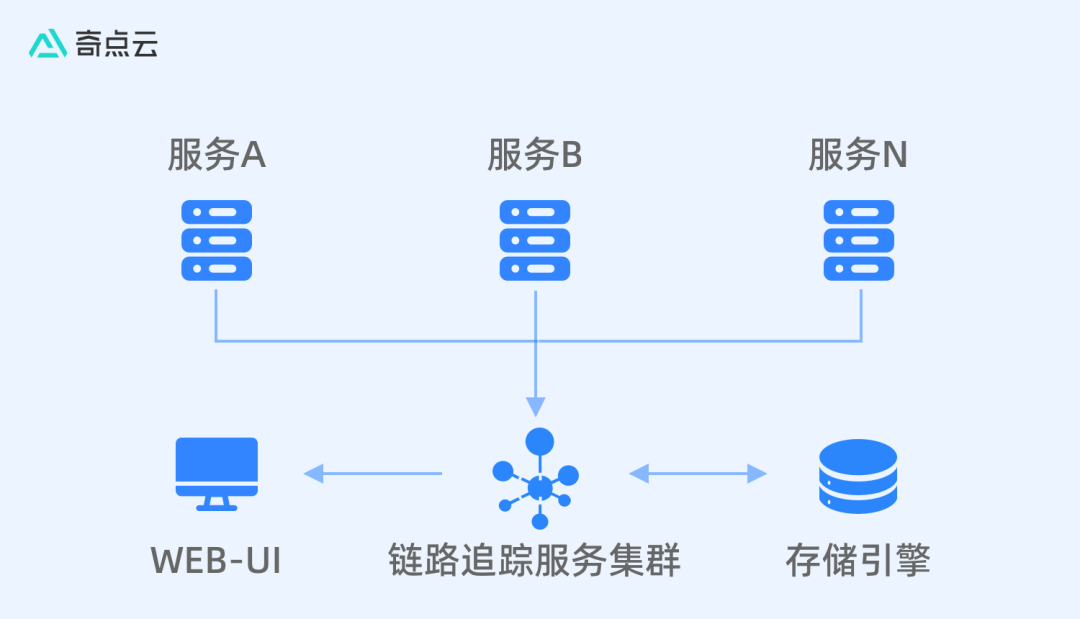
3. “高效调度”的数据中台

4. “高效运维”的数据中台


5. 小结

边栏推荐
- 年薪中位数超30万,南大AI专业首届毕业生薪资曝光
- 2022工具钳工(初级)考试练习题模拟考试平台操作
- Common fault analysis and Countermeasures of MySQL in go language
- Where to find capacitance parameters!?
- 得物多活架构设计之路由服务设计
- Easy to understand soft route brushing tutorial
- Operation of 2022 tool fitter (elementary) examination practice question simulation examination platform
- QT knowledge: QT widgets widget function [02]
- 运行时应用自我保护(RASP):应用安全的自我修养
- 【综合笔试题】30. 串联所有单词的子串
猜你喜欢

DevEco Device Tool 助力OpenHarmony设备开发

Go 语言使用 MySQL 的常见故障分析和应对方法

Leetcode 1209. Delete all adjacent duplicates II in the string

并购增资或将有望启动东软越通新动能?

Blue Bridge Cup single chip microcomputer (I) -- turn off peripherals and turn off led

Getting started with redis - Chapter 2 - data structures and objects - linked lists
Qt5 knowledge: some key points of signals and slots

年薪中位数超30万,南大AI专业首届毕业生薪资曝光
QT5知识:信号和槽的一些要点

ROS2知识(6):坐标对象TF原理和实践
随机推荐
ROS知识:librviz库的调用实践
我在佛山,到哪里开户比较好?手机开户安全么?
Analysis of six dimensional chart: analysis of enterprise growth of CSCEC
Mobile securities account opening transaction? Is it safe to open an account online now?
"Dream of children's travel" in 2022, GAC Honda children's road safety charity travel entered the Northeast
Shell process control - 39. Special process control statements
Halcon原理:auto_threshold算子
Use xtradiagram Diagramcontrol for drawing and controlling process graphics
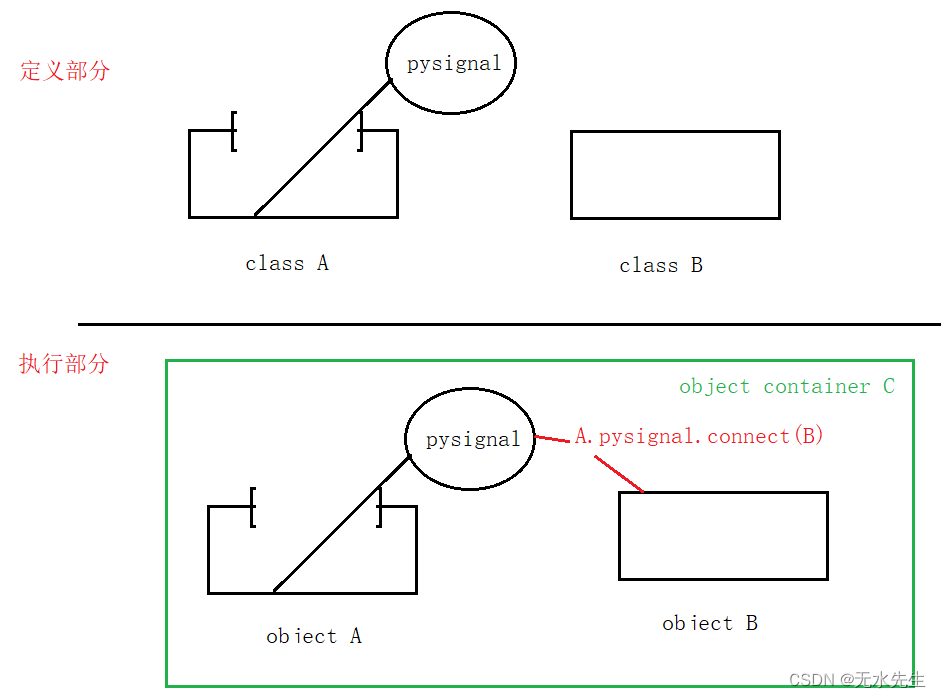
详解PyQt5信号与槽的关系
LinkedList 5-141. 环形链表
Introduction to redis - Chapter 3 - data structures and objects - Dictionary
Runtime application self-protection (rasp): self-cultivation of application security
Is there any regulation on the redemption time of financial products?
ROS察微【57】:配置手臂机器人来抓东西
Blue Bridge Cup single chip microcomputer (I) -- turn off peripherals and turn off led
目前 在哪里开户是最安全正规的?
halcon知识:dyn_threshold的用法(划痕检测)
Ros2 knowledge (1): start practicing robots
ROS observation [51]: how to integrate odometer and IMU with robots_ Localization convergence
Oversampling series I: sampling theorem and oversampling rate