当前位置:网站首页>leetcode-1964:找出到每个位置为止最长的有效障碍赛跑路线
leetcode-1964:找出到每个位置为止最长的有效障碍赛跑路线
2022-07-02 23:55:00 【菊头蝙蝠】
leetcode-1964:找出到每个位置为止最长的有效障碍赛跑路线
题目
题目连接
你打算构建一些障碍赛跑路线。给你一个 下标从 0 开始 的整数数组 obstacles ,数组长度为 n ,其中 obstacles[i] 表示第 i 个障碍的高度。
对于每个介于 0 和 n - 1 之间(包含 0 和 n - 1)的下标 i ,在满足下述条件的前提下,请你找出 obstacles 能构成的最长障碍路线的长度:
- 你可以选择下标介于 0 到 i 之间(包含 0 和 i)的任意个障碍。
- 在这条路线中,必须包含第 i 个障碍。
- 你必须按障碍在 obstacles 中的 出现顺序 布置这些障碍。
- 除第一个障碍外,路线中每个障碍的高度都必须和前一个障碍 相同 或者 更高 。
返回长度为 n 的答案数组 ans ,其中 ans[i] 是上面所述的下标 i 对应的最长障碍赛跑路线的长度。
示例 1:
输入:obstacles = [1,2,3,2]
输出:[1,2,3,3]
解释:每个位置的最长有效障碍路线是:
- i = 0: [1], [1] 长度为 1
- i = 1: [1,2], [1,2] 长度为 2
- i = 2: [1,2,3], [1,2,3] 长度为 3
- i = 3: [1,2,3,2], [1,2,2] 长度为 3
示例 2:
输入:obstacles = [2,2,1]
输出:[1,2,1]
解释:每个位置的最长有效障碍路线是:
- i = 0: [2], [2] 长度为 1
- i = 1: [2,2], [2,2] 长度为 2
- i = 2: [2,2,1], [1] 长度为 1
示例 3:
输入:obstacles = [3,1,5,6,4,2]
输出:[1,1,2,3,2,2]
解释:每个位置的最长有效障碍路线是:
- i = 0: [3], [3] 长度为 1
- i = 1: [3,1], [1] 长度为 1
- i = 2: [3,1,5], [3,5] 长度为 2, [1,5] 也是有效的障碍赛跑路线
- i = 3: [3,1,5,6], [3,5,6] 长度为 3, [1,5,6] 也是有效的障碍赛跑路线
- i = 4: [3,1,5,6,4], [3,4] 长度为 2, [1,4] 也是有效的障碍赛跑路线
- i = 5: [3,1,5,6,4,2], [1,2] 长度为 2
解题
这道题,一看其实是和leetcode-300:最长递增子序列一样的,但是对于这道题 O ( n 2 ) O(n^2) O(n2)的方法会超时,因此要时间复杂度更低的方法
方法一:动态规划+二分查找
MinVals[i]:i表示当前已经构建的长度为i的障碍物路线长度,MinVals[i]表示长度为i的障碍物长度的最后一个障碍物的高度。
那么就可以遍历障碍物,与MinVals[i]比就行了,如果比他高,那么结果就是MinVals[i]+1。由于Minvals[i]是一个非严格递增的数组,因此可以使用二分查找,将时间复杂度降低为 O ( n l o g 2 n ) O(nlog_2n) O(nlog2n)
class Solution {
public:
vector<int> longestObstacleCourseAtEachPosition(vector<int>& obstacles) {
int n=obstacles.size();
vector<int> res;
vector<int> MinVals(n+1,INT_MAX);//构建i长度的最小的障碍物高度值。
MinVals[0]=INT_MIN;
for(int i=0;i<n;i++){
//二分查找(找到长度最大的,且障碍高度小于obstacles[i])
int l=0,r=i+1;//i+1就是所能达到的最大长度
while(l<r){
int mid=(l+r)/2;
if(obstacles[i]<MinVals[mid]) r=mid;
else l=mid+1;//相等或者等于,都应该去找更长的长度
}//因此最终得到的l是已经构建的长度+1
res.push_back(l);
MinVals[l]=min(MinVals[l],obstacles[i]);
}
return res;
}
};
边栏推荐
- Multi process programming (III): message queue
- 世平信息首席科学家吕喆:构建以数据和人员为中心的安全能力
- University of Toronto: Anthony coach | the conditions of deep reinforcement learning can induce dynamic risk measurement
- 【案例分享】让新时代教育发展与“数”俱进
- 使用jenkins之二Job
- [pulsar document] concepts and architecture
- 【日常训练】871. 最低加油次数
- pod生命周期详解
- lex && yacc && bison && flex 配置的问题
- form表单实例化
猜你喜欢

Linux软件:如何安装Redis服务

pageoffice-之bug修改之旅

Vulkan performance and refinement

Callback event after the antv X6 node is dragged onto the canvas (stepping on a big hole record)
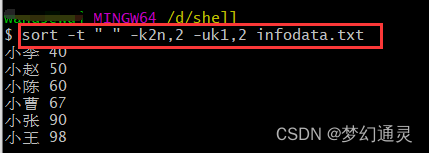
Shell implements basic file operations (cutting, sorting, and de duplication)
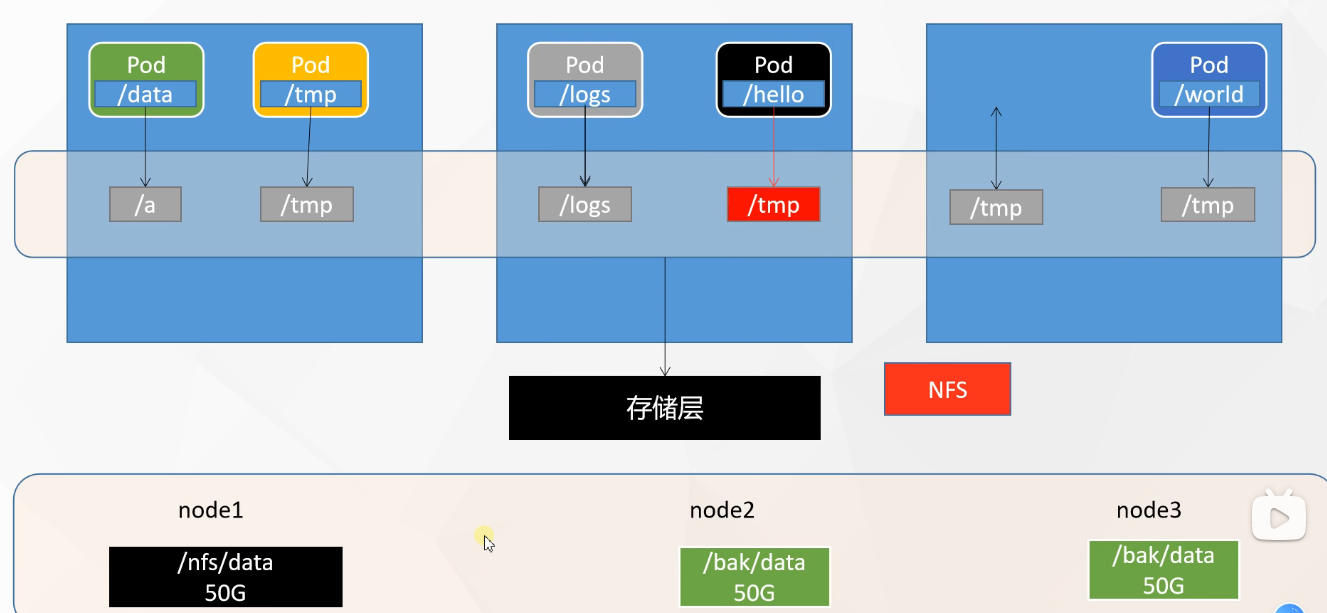
kubernetes资源对象介绍及常用命令(五)-(NFS&PV&PVC)

Automated defect analysis in electronic microscopic images

【小程序项目开发-- 京东商城】uni-app之自定义搜索组件(中)-- 搜索建议
2022上半年值得被看见的10条文案,每一句都能带给你力量!

An excellent orm in dotnet circle -- FreeSQL
随机推荐
Some introduction and precautions about XML
Shell 实现文件基本操作(sed-编辑、awk-匹配)
About qbytearray storage hexadecimal and hexadecimal conversion
Unity learns from spaceshooter to record the difference between fixedupdate and update in unity for the second time
Multiprocess programming (V): semaphores
JSON conversion tool class
奥斯陆大学:Li Meng | 基于Swin-Transformer的深度强化学习
【日常训练】871. 最低加油次数
Nacos+openfeign error reporting solution
如何系统学习机器学习
Wechat applet obtains the information of an element (height, width, etc.) and converts PX to rpx.
[IELTS reading] Wang Xiwei reading P2 (reading fill in the blank)
Win10 多种方式解决无法安装.Net3.5的问题
NC24840 [USACO 2009 Mar S]Look Up
可下载《2022年中国数字化办公市场研究报告》详解1768亿元市场
Andorid gets the system title bar height
Nc50528 sliding window
Shell implements basic file operations (SED edit, awk match)
1.11 - bus
Liad: the consumer end of micro LED products is first targeted at TVs above 100 inches. At this stage, it is still difficult to enter a smaller size