当前位置:网站首页>PCL知识点——体素化网格方法对点云进行下采样
PCL知识点——体素化网格方法对点云进行下采样
2022-07-02 14:49:00 【Jerry_Sea】
体素化网格方法:
“使用体素化网格方法实现下采样,即减少点的数量,减少点云数据,并同时保持点云的形状特征,在提高配准、曲面重建、形状识别等算法速度中非常实用。
PCL实现的VoxelGrid类通过输入的点云数据创建一个三维体素栅格(可把体素栅格想象为微小的空间三维立方体的集合),然后在每个体素(即三维立方体)内,用体素中所有点的重心来近似显示体素中其他点,这样该体素内所有点就用一个重心点最终表示,对于所有体素处理后得到过滤后的点云。这种方法比用体素中心来逼近的方法更慢,但它对于采样点对应曲面的表示更为准确。”
2 知识点补充
2.1 点云数据结构
根据激光测量原理得到的点云,包含三维坐标信息(xyz)和激光反射强度信息(intensity),激光反射强度与仪器的激光发射能量、波长,目标的表面材质、粗糙程度、入射角相关。根据摄影测量原理得到的点云,包括三维坐标(xyz)和颜色信息(rgb)
PCL的基本数据类型是PointCloud,一个PointCloud是一个C++的模板类,它包含了以下字段:
width(int):指定点云数据集的宽度
对于无组织格式的数据集,width代表了所有点的总数
对于有组织格式的数据集,width代表了一行中的总点数
height(int):制定点云数据集的高度
对于无组织格式的数据集,值为1
对于有组织格式的数据集,表示总行数
points(std::vector):包含所有PointT类型的点的数据列表
PLC的衍生类型如下:
PointXYZ - float x, y, z
PointXYZI - float x, y, z, intensity
PointXYZRGB - float x, y, z, rgb
PointXYZRGBA - float x, y, z, uint32_t rgba
Normal - float normal[3], curvature 法线方向,对应的曲率的测量值
PointNormal - float x, y, z, normal[3], curvature 采样点,法线和曲率
Histogram - float histogram[N] 用于存储一般用途的n维直方图
2.2 点云数据的读写
#include <iostream>
#include <pcl/io/pcd_io.h> //PCD数据,读写类相关的头文件
#include <pcl/point_types.h> //PCL中支持的点类型头文件,包含一些PointT类型的结构体声明,如:pcl::PointXYZ该类型
int read();
void write();
int main(int argc,char** argv)
{
int ret_r = read();
write();
return 0;
}
int read()
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);//创建一个PointCloud<PointXYZ> Ptr共享指针并进行实例化。
//pcl::PointCloud<pcl::PointXYZ>可以类比vector<int>
if(pcl::io::loadPCDFile<pcl::PointXYZ>("test_pcd.pcd",*cloud)==-1)//打开点云文件
{
PCL_ERROR("Couldn't read file test_pcd.pcd\n");
return -1;
}
// 很重要!!!!
//sensor_msgs::PointCloud2 cloud_blob; //sensor_msgs::PointCloud2是一类点云结构(ROS点云话题),可以和pcl::PointCloud<T>这个转换
//pcl::io::loadPCDFile("test_pcd.pcd", cloud_blob);
//pcl::fromROSMsg(cloud_blob, *cloud); //将sensor_msgs::PointCloud2转换为pcl::PointCloud<T>
std::cout<<"Loaded "<<cloud->width*cloud->height<< " data points from test_pcd.pcd with the following fields: "<<std::endl;
for(size_t i=0;i<cloud->points.size();++i)
std::cout<<" "<<cloud->points[i].x<<" "<<cloud->points[i].y<<" "<<cloud->points[i].z<<std::endl;
return 0;
}
void write()
{
pcl::PointCloud<pcl::PointXYZ> cloud;
// 创建点云
cloud.width=5;
cloud.height=1;
cloud.is_dense=false;
cloud.points.resize(cloud.width*cloud.height);
for(size_t i=0;i<cloud.points.size();++i)
{
cloud.points[i].x=1024*rand()/(RAND_MAX+1.0f);
cloud.points[i].y=1024*rand()/(RAND_MAX+1.0f);
cloud.points[i].z=1024*rand()/(RAND_MAX+1.0f);
}
std::cout<<"rand: "<<rand()<<"RAND_MAX: "<<RAND_MAX;
//保存点云
pcl::io::savePCDFileASCII("test_write_pcd.pcd",cloud);
std::cerr<<"Saved "<<cloud.points.size()<<" data points to test_pcd.pcd."<<std::endl;
for(size_t i=0;i<cloud.points.size();++i)
std::cerr<<" "<<cloud.points[i].x<<" "<<cloud.points[i].y<<" "<<cloud.points[i].z<<std::endl;
}
CMakeLists.txt:
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(pcd_read)
find_package(PCL 1.2 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable(pcd_read pcd_rw.cpp)
target_link_libraries(pcd_read ${PCL_LIBRARIES})
输出内容:
[email protected]:~/wuhd/code/pcl/3/1/build$ ./pcd_read
Loaded 5 data points from test_pcd.pcd with the following fields:
1.28125 577.094 197.938
828.125 599.031 491.375
358.688 917.438 842.562
764.5 178.281 879.531
727.531 525.844 311.281
rand: 1967513926RAND_MAX: 2147483647Saved 5 data points to test_pcd.pcd.
0.352222 -0.151883 -0.106395
-0.397406 -0.473106 0.292602
-0.731898 0.667105 0.441304
-0.734766 0.854581 -0.0361733
-0.4607 -0.277468 -0.916762
使用cat指令可以查看pcd文件(PCD文件如下)
[email protected]:~/wuhd/code/pcl/3/1/build$ cat test_write_pcd.pcd
# .PCD v0.7 - Point Cloud Data file format
VERSION 0.7
FIELDS x y z
SIZE 4 4 4
TYPE F F F
COUNT 1 1 1
WIDTH 5
HEIGHT 1
VIEWPOINT 0 0 0 1 0 0 0
POINTS 5
DATA ascii
0.35222197 -0.15188313 -0.10639524
-0.3974061 -0.47310591 0.29260206
-0.73189831 0.66710472 0.44130373
-0.73476553 0.85458088 -0.036173344
-0.46070004 -0.2774682 -0.91676188
VERSION 0.5 指定PCS文件版本
FIELDS x y z 指定一个点的每一个维度和字段名字,例如
FIELDS x y z # XYZ data
FIELDS x y z rgb # XYZ + colors
FIELDS x y z normal_x normal_y normal_z # XYZ + surface normals
SIZE 4 4 4 指定每一个维度的字节数大小
TYPE F F F 指定每一个维度的类型,I表示int,U表示uint,F表示浮点
COUNT 1 1 1 指定每一个维度包含的元素数,如果没有COUNT,默认都为1
WIDTH 5 点云数据集的宽度
HEIGHT 1 点云数据集的高度
VIEWPOINT 0 0 0 1 0 0 0 指定点云获取的视点和角度,在不同坐标系之间转换时使用(由3个平移+4个四元数构成)
POINTS 5 总共的点数(显得多余)
DATA ascii 存储点云数据的数据类型,ASCII和binary
补充:PCL 中 PCD 文件格式的正式发布是 0.7版本,之前也有0.5,0.6版本。
有时为了节省空间,提高读写效率,还会以binary的格式进行序列化,即将save操作改为
pcl::io::savePCDFileBinary("test_pcd_binary.pcd", cloud);
// 或
pcl::io::savePCDFile("test_pcd_binary.pcd", cloud, true);
此时输出的内容如下:
[email protected]:~/wuhd/code/pcl/3/1/build$ cat test_write_pcd_bin.pcd
# .PCD v0.7 - Point Cloud Data file format
VERSION 0.7
FIELDS x y z
SIZE 4 4 4
TYPE F F F
COUNT 1 1 1
WIDTH 5
HEIGHT 1
VIEWPOINT 0 0 0 1 0 0 0
POINTS 5
DATA binary
pV�>@����ٽ�x˾�:���ϕ>�];�`�*?���>�<���Z?�*�����P����j�
注意最后一行输出以二进制形式保存,故而不可以直接看到值。
2.3 ROS下进行点云数据实时获取与可视化
cpp
#include <ros/ros.h>
#include <pcl_ros/point_cloud.h>
#include <pcl/io/pcd_io.h>
#include <sstream>
#include <string.h>
typedef pcl::PointXYZRGB PointT;
typedef pcl::PointCloud<PointT> PointCloudT;
PointCloudT::Ptr cloud(new PointCloudT);
//std::string world_frame_id;
std::string frame_id;
std::string path;
void cloud_cb (const PointCloudT::ConstPtr& callback_cloud)
{
*cloud = *callback_cloud;
frame_id = cloud->header.frame_id;
std::stringstream ss;
std::string s1;
ss<<ros::Time::now();
s1=ss.str();
// cloud saving:
std::string file_name=path+"cloud_"+frame_id.substr(0, frame_id.length())+"_"+s1+".pcd";
//形式一:substr(pos,n)注释:1.pos表示截取字符的下标。2.n代表从截取pos之后的n个字符。
//形式二:substr(n)注释:1.若n>=0,表示截取从下标为n后的所有字符。2.若n<0,表示截取字符串倒数第n个后的所有字符。
std::cout<<file_name<<std::endl;
pcl::io::savePCDFileBinary(file_name,*cloud);
}
int
main (int argc, char** argv)
{
ros::init(argc, argv, "save_cloud");
ros::NodeHandle nh("~");
//Read some parameters from launch file:
std::string pointcloud_topic = "/camera/depth_registered/points";
path = "./pointtest/";
// Subscribers:
ros::Subscriber sub = nh.subscribe(pointcloud_topic, 1, cloud_cb);
std::cout<<"receive messages successfully!"<<std::endl;
ros::spin();
return 0;
}
CMakeLists.txt
cmake_minimum_required(VERSION 2.8.3)
project(my_savecloud_tutorials)
find_package(catkin REQUIRED COMPONENTS
pcl_conversions
pcl_ros
roscpp
sensor_msgs
std_msgs
)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES my_savecloud_tutorials
# CATKIN_DEPENDS pcl_conversions pcl_ros roscpp sensor_msgs std_msgs
# DEPENDS system_lib
)
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
add_executable(save_cloud src/save_cloud.cpp)
target_link_libraries(save_cloud ${catkin_LIBRARIES})
边栏推荐
- 社交元宇宙平台Soul冲刺港股:年营收12.8亿 腾讯是股东
- Eye of depth (II) -- matrix and its basic operations
- Cell:清华程功组揭示皮肤菌群的一种气味挥发物促进黄病毒感染宿主吸引蚊虫...
- Linux Installation PostgreSQL + Patroni cluster problem
- 博客主题 “Text“ 夏日清新特别版
- Listing of chaozhuo Aviation Technology Co., Ltd.: raising 900million yuan, with a market value of more than 6billion yuan, becoming the first science and technology innovation board enterprise in Xia
- Usage of sprintf() function in C language
- 二、mock平台的扩展
- Blog theme "text" summer fresh Special Edition
- Vscode setting delete line shortcut [easy to understand]
猜你喜欢

伟立控股港交所上市:市值5亿港元 为湖北贡献一个IPO
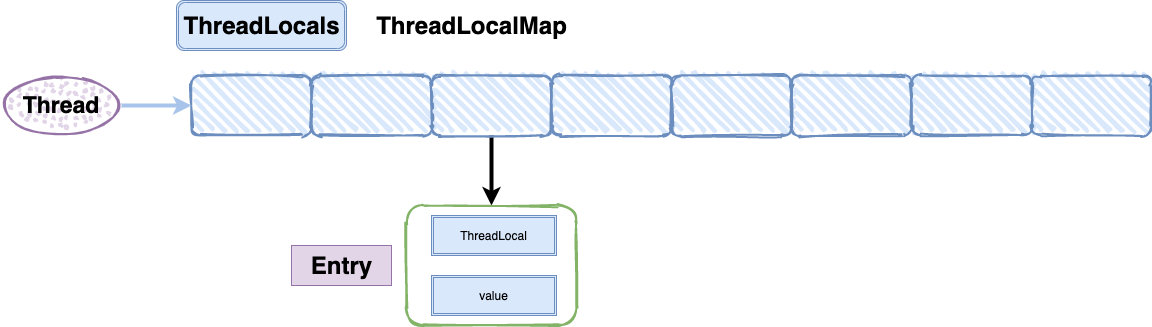
ThreadLocal
![[error record] error -32000 received from application: there are no running service protocol](/img/6c/66099650de46cac88b805e6cfb90b9.jpg)
[error record] error -32000 received from application: there are no running service protocol

Exploration of mobile application performance tools
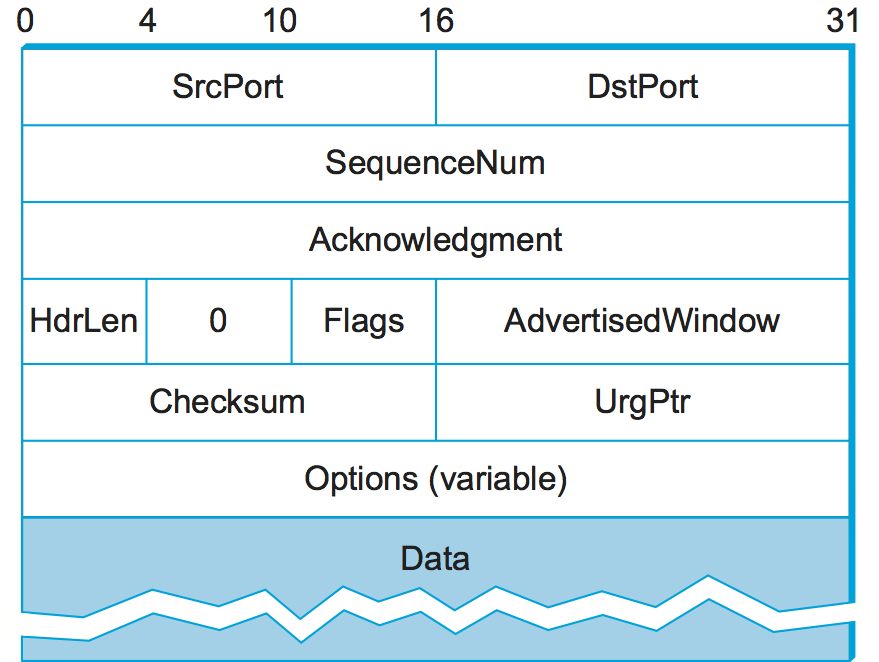
TCP congestion control details | 2 background

Changwan group rushed to Hong Kong stocks: the annual revenue was 289million, and Liu Hui had 53.46% voting rights

How to transfer business data with BorgWarner through EDI?
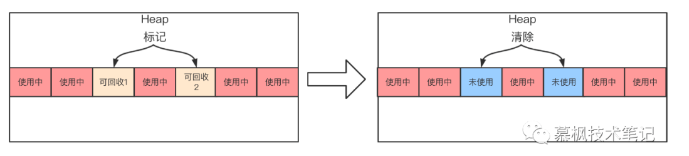
Believe in yourself and finish the JVM interview this time
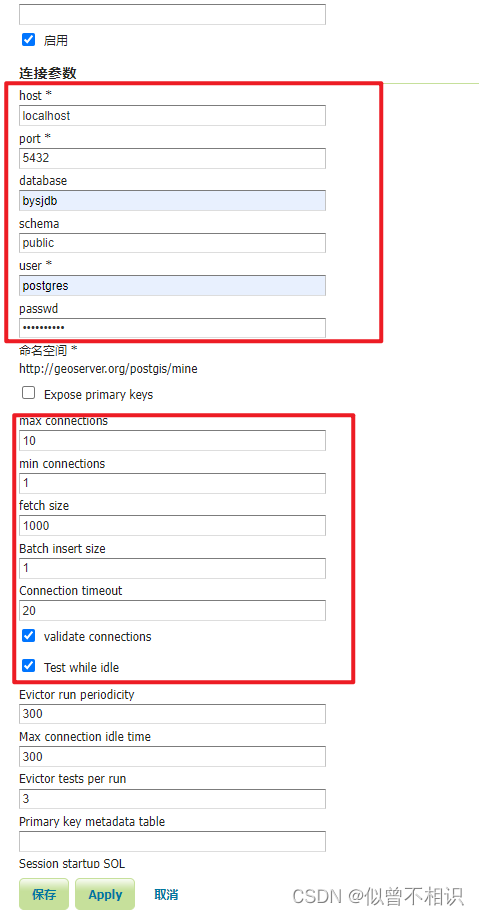
GeoServer:发布PostGIS数据源

Sword finger offer 21 Adjust the array order so that odd numbers precede even numbers
随机推荐
Blog theme "text" summer fresh Special Edition
Timing / counter of 32 and 51 single chip microcomputer
Sword finger offer 25 Merge two sorted linked lists
二、mock平台的扩展
2322. Remove the minimum fraction of edges from the tree (XOR and & Simulation)
TCP congestion control details | 2 background
Sword finger offer 27 Image of binary tree
七张图,学会做有价值的经营分析
【Leetcode】13. 罗马数字转整数
超卓航科上市:募资9亿市值超60亿 成襄阳首家科创板企业
13、Darknet YOLO3
The macrogenome microbiome knowledge you want is all here (2022.7)
MOSFET器件手册关键参数解读
QWebEngineView崩溃及替代方案
Experience home office, feel the completion of the project | community essay solicitation
The poor family once again gave birth to a noble son: Jiangxi poor county got the provincial number one, what did you do right?
QStyle实现自绘界面项目实战(二)
【征文活动】亲爱的开发者,RT-Thread社区喊你投稿啦
深度之眼(二)——矩阵及其基本运算
海思Hi3798MV100机顶盒芯片介绍[通俗易懂]