当前位置:网站首页>YOLOv7-Pose尝鲜,基于YOLOv7的关键点模型测评
YOLOv7-Pose尝鲜,基于YOLOv7的关键点模型测评
2022-08-04 18:01:00 【pogg_】
【前言】
本文首发于GiantPandaCV,未经许可请勿转载!目前人体姿态估计总体分为Top-down和Bottom-up两种,与目标检测不同,无论是基于热力图或是基于检测器处理的关键点检测算法,都较为依赖计算资源,推理耗时略长,今年出现了以YOLO为基线的关键点检测器。玩过目标检测的童鞋都知道YOLO以及各种变种目前算是工业落地较多的一类检测器,其简单的设计思想,长期活跃的社区生态,使其始终占据着较高的话题度。
【演变】
在ECCV 2022和CVPRW 2022会议上,YoLo-Pose和KaPao(下称为yolo-like-pose)都基于流行的YOLO目标检测框架提出一种新颖的无热力图的方法,类似于很久以前谷歌使用回归计算关键点的思想,yolo-like-pose一不使用检测器进行二阶处理,二部使用热力图拼接,虽然是一种暴力回归关键点的检测算法,但在处理速度上具有一定优势。
kapao
去年11月,滑铁卢大学率先提出了 KaPao:Rethinking Keypoint Representations: Modeling Keypoints and Poses as Objects for Multi-Person Human Pose Estimation,基于YOLOv5进行关键点检测,该文章目前已被ECCV 2022接收,该算法所取得的性能如下: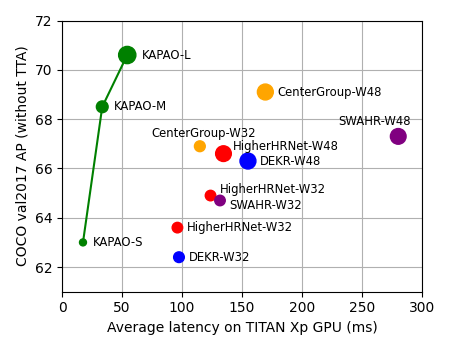
paper:https://arxiv.org/abs/2111.08557
code:https://github.com/wmcnally/kapao
yolov5-pose
今年4月,yolo-pose也挂在了arvix,在论文中,通过调研发现 HeatMap 的方式普遍使用L1 Loss。然而,L1损失并不一定适合获得最佳的OKS。且由于HeatMap是概率图,因此在基于纯HeatMap的方法中不可能使用OKS作为loss,只有当回归到关键点位置时,OKS才能被用作损失函数。
因此,yolo-pose使用oks loss作为关键点的损失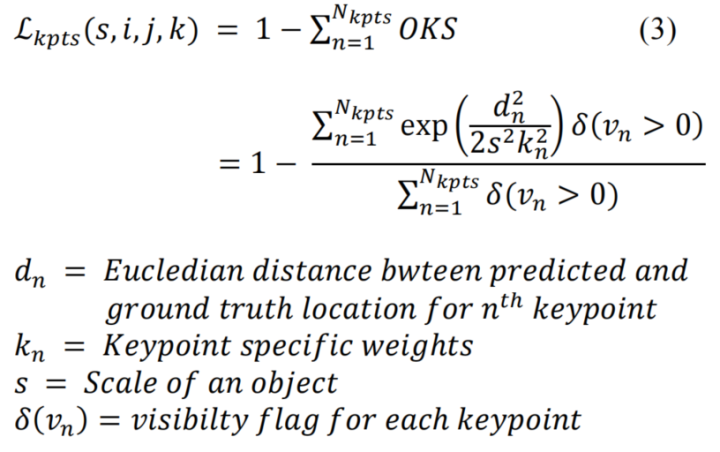
相关代码在https://github.com/TexasInstruments/edgeai-yolov5/blob/yolo-pose/utils/loss.py也可见到:
if self.kpt_label:
#Direct kpt prediction
pkpt_x = ps[:, 6::3] * 2. - 0.5
pkpt_y = ps[:, 7::3] * 2. - 0.5
pkpt_score = ps[:, 8::3]
#mask
kpt_mask = (tkpt[i][:, 0::2] != 0)
lkptv += self.BCEcls(pkpt_score, kpt_mask.float())
#l2 distance based loss
#lkpt += (((pkpt-tkpt[i])*kpt_mask)**2).mean() #Try to make this loss based on distance instead of ordinary difference
#oks based loss
d = (pkpt_x-tkpt[i][:,0::2])**2 + (pkpt_y-tkpt[i][:,1::2])**2
s = torch.prod(tbox[i][:,-2:], dim=1, keepdim=True)
kpt_loss_factor = (torch.sum(kpt_mask != 0) + torch.sum(kpt_mask == 0))/torch.sum(kpt_mask != 0)
lkpt += kpt_loss_factor*((1 - torch.exp(-d/(s*(4*sigmas**2)+1e-9)))*kpt_mask).mean()
相关性能如下: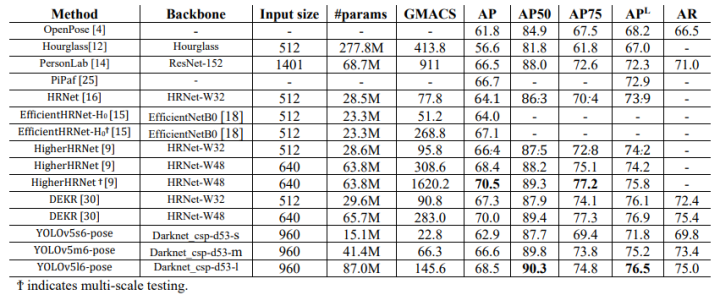
yolov7-pose
上个星期,YOLOv7的作者也放出了关于人体关键点检测的模型,该模型基于YOLOv7-w6,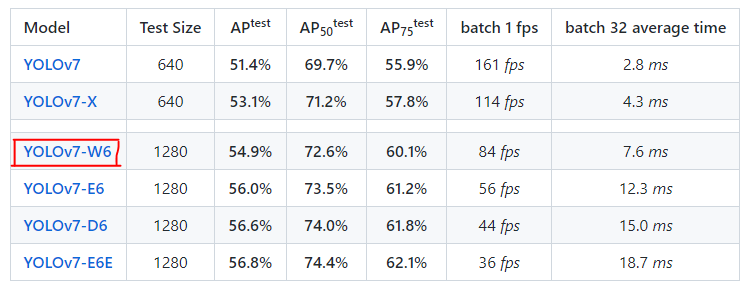
目前作者提供了.pt文件和推理测试的脚本,有兴趣的童靴可以去看看,本文的重点更偏向于对yolov7-pose.pt进行onnx文件的抽取和推理。
【yolov7-pose + onnxruntime】
首先下载好官方的预训练模型,使用提供的脚本进行推理:
% weigths = torch.load('weights/yolov7-w6-pose.pt')
% image = cv2.imread('sample/pose.jpeg')
!python pose.py

一、yolov7-w6 VS yolov7-w6-pose:
- 首先看下yolov7-w6使用的检测头
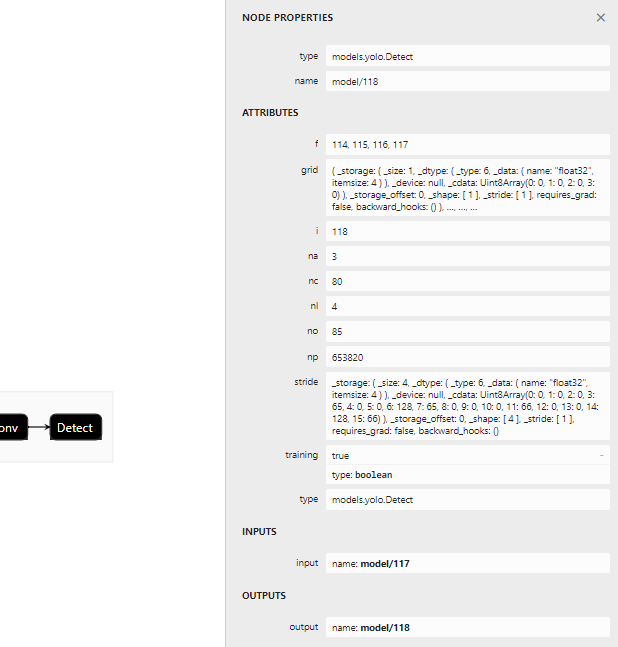
- f f f 表示一共有四组不同尺度的检测头,分别为15×15,30×30,60×60,120×120,对应输出的节点为114,115,116,117
- nc对应coco的80个类别
- no表示 c l a s s . n u m + o b j + r e g = 80 + 1 + 4 = 85 class_.num+obj+reg = 80+1+4=85 class.num+obj+reg=80+1+4=85
- 再看看yolov7-w6-pose使用的检测头:
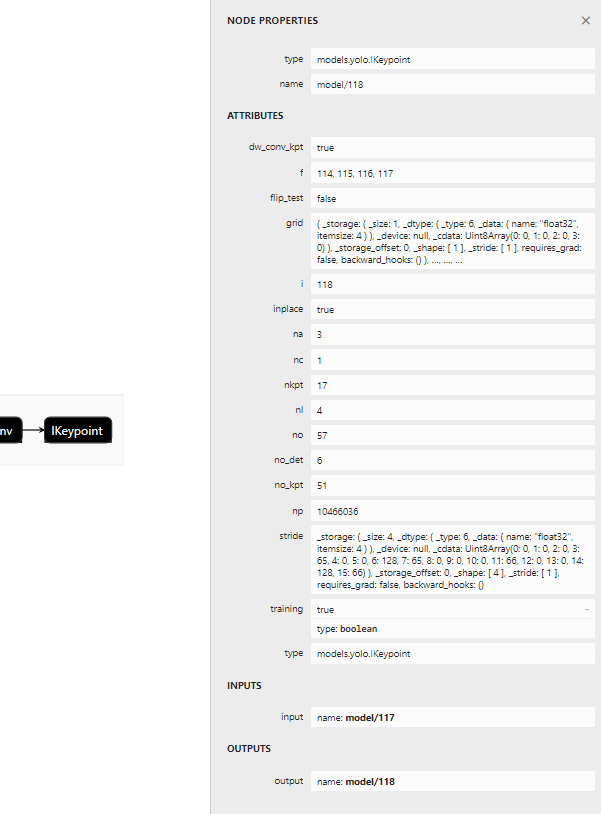
上述重复的地方不累述,讲几个点:
- n c = 1 nc=1 nc=1 代表person一个类别
- nkpt表示人体的17个关键点
- n o = 17 ∗ 3 = n k p t ∗ ( x + y + o b j ) = 57 no=17*3=nkpt*(x+y+obj)=57 no=17∗3=nkpt∗(x+y+obj)=57
二、修改export脚本
如果直接使用export脚本进行onnx的抽取一定报错,在上一节我们已经看到pose.pt模型使用的检测头为IKeypoint,那么脚本需要进行相应更改:
在export.py的这个位置插入:
# 原代码:
for k, m in model.named_modules():
m._non_persistent_buffers_set = set() # pytorch 1.6.0 compatibility
if isinstance(m, models.common.Conv): # assign export-friendly activations
if isinstance(m.act, nn.Hardswish):
m.act = Hardswish()
elif isinstance(m.act, nn.SiLU):
m.act = SiLU()
model.model[-1].export = not opt.grid # set Detect() layer grid export
# 修改代码:
for k, m in model.named_modules():
m._non_persistent_buffers_set = set() # pytorch 1.6.0 compatibility
if isinstance(m, models.common.Conv): # assign export-friendly activations
if isinstance(m.act, nn.Hardswish):
m.act = Hardswish()
elif isinstance(m.act, nn.SiLU):
m.act = SiLU()
elif isinstance(m, models.yolo.IKeypoint):
m.forward = m.forward_keypoint # assign forward (optional)
# 此处切换检测头
model.model[-1].export = not opt.grid # set Detect() layer grid export
forward_keypoint在原始的yolov7 repo源码中有,作者已经封装好,但估计是还没打算开放使用。
使用以下命令进行抽取:
python export.py --weights 'weights/yolov7-w6-pose.pt' --img-size 960 --simplify True
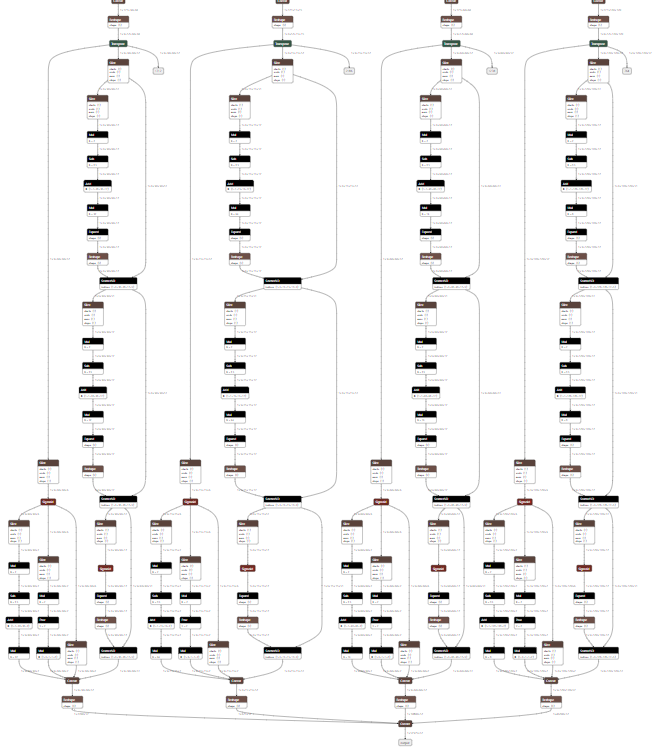
抽取后的onnx检测头:
三、onnxruntime推理
onnxruntime推理代码:
import onnxruntime
import matplotlib.pyplot as plt
import torch
import cv2
from torchvision import transforms
import numpy as np
from utils.datasets import letterbox
from utils.general import non_max_suppression_kpt
from utils.plots import output_to_keypoint, plot_skeleton_kpts
device = torch.device("cpu")
image = cv2.imread('sample/pose.jpeg')
image = letterbox(image, 960, stride=64, auto=True)[0]
image_ = image.copy()
image = transforms.ToTensor()(image)
image = torch.tensor(np.array([image.numpy()]))
print(image.shape)
sess = onnxruntime.InferenceSession('weights/yolov7-w6-pose.onnx')
out = sess.run(['output'], {
'images': image.numpy()})[0]
out = torch.from_numpy(out)
output = non_max_suppression_kpt(out, 0.25, 0.65, nc=1, nkpt=17, kpt_label=True)
output = output_to_keypoint(output)
nimg = image[0].permute(1, 2, 0) * 255
nimg = nimg.cpu().numpy().astype(np.uint8)
nimg = cv2.cvtColor(nimg, cv2.COLOR_RGB2BGR)
for idx in range(output.shape[0]):
plot_skeleton_kpts(nimg, output[idx, 7:].T, 3)
# matplotlib inline
plt.figure(figsize=(8, 8))
plt.axis('off')
plt.imshow(nimg)
plt.show()
plt.savefig("tmp")
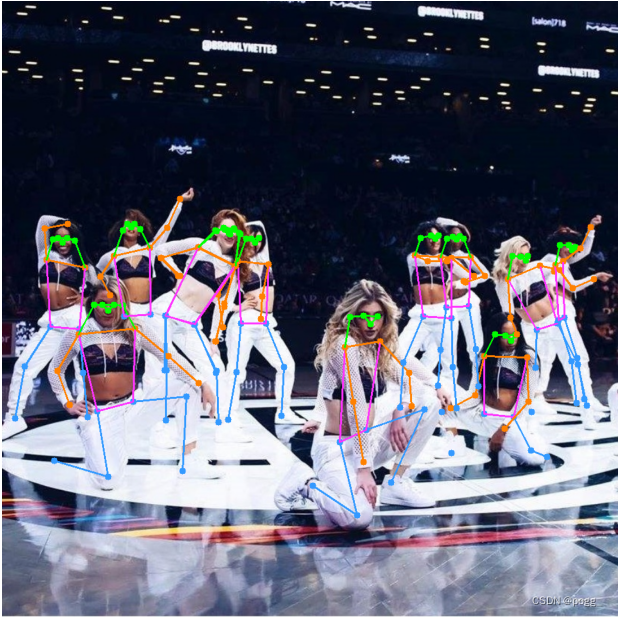
推理效果几乎无损,但耗时会缩短一倍左右,另外有几个点:
- image = letterbox(image, 960, stride=64, auto=True)[0] 中stride指的是最大步长,yolov7-w6和yolov5s下采样多了一步,导致在8,16,32的基础上多了64的下采样步长
- output = non_max_suppression_kpt(out, 0.25, 0.65, nc=1, nkpt=17, kpt_label=True) ,nc 和 kpt_label 等信息在netron打印模型文件时可以看到
- 所得到的onnx相比原半精度模型大了将近三倍,后续排查原因
- yolov7-w6-pose极度吃显存,推理一张960×960的图像,需要2-4G的显存,训练更难以想象
边栏推荐
- FE01_OneHot-Scala应用
- clickhouse 上下线表
- Documentary on Security Reinforcement of Network Range Monitoring System (1)—SSL/TLS Encrypted Transmission of Log Data
- clickhouse online and offline table
- 【注册荣耀开发者】赢【荣耀70】手机
- margin 塌陷和重合的理解
- 数据集成:holo数据同步至redis。redis必须是集群模式?
- 树莓派连接蓝牙音箱
- 企业调查相关性分析案例
- Introduction of three temperature measurement methods for PT100 platinum thermal resistance
猜你喜欢


随机推荐
电源测试系统-ATE电源测试系统-ACDC电源模块测试系统NSAT-8000
开发那些事儿:如何通过EasyCVR平台获取监控现场的人流量统计数据?
语音识别学习资源
【web自动化测试】Playwright快速入门,5分钟上手
智能视频监控平台EasyCVR如何使用接口批量导出iframe地址?
Google Earth Engine APP——一键在线查看全球1984-至今年的影像同时加载一个影像分析
PT100铂热电阻三种测温方法介绍
Thrift IDL Sample File
Develop those things: How to obtain the traffic statistics of the monitoring site through the EasyCVR platform?
从-99打造Sentinel高可用集群限流中间件
dotnet core 使用 CoreRT 将程序编译为 Native 程序
《中国综合算力指数》《中国算力白皮书》《中国存力白皮书》《中国运力白皮书》在首届算力大会上重磅发出
Flask框架实现注册加密功能详解【Flask企业课学习】
树莓派利用autofs自动挂载/卸载外部硬盘
Understanding of margin collapse and coincidence
静态iP与权限更改[通俗易懂]
树莓派通过API向企业微信推送图文
Short-term reliability and economic evaluation of resilient microgrids under incentive-based demand response programs (Matlab code implementation)
如何模拟后台API调用场景,很细!
Codeforces积分系统介绍