当前位置:网站首页>IMU的学习记录
IMU的学习记录
2022-06-12 14:51:00 【春至冬去】
IMU的学习记录
文章目录
一、IMU简单介绍
1.IMU原理
当我们晚上回到家,发现家里停电时,眼睛在黑暗中什么都看不见的情况下,只能根据自己的经验,极为谨慎地走小碎步,并不断用手摸周围的东西(比如冰箱),用以确定自己所在的位置。
IMU的原理和黑暗中走小碎步很相似。在黑暗中,由于自己对步长的估计和实际走的距离存在误差,走的步数越来越多时,自己估计的位置与实际的位置相差会越来越远。就像下图所示:

走第一步时,估计位置(黑人所在位置)与实际位置(白人所在位置)还比较接近;但随着步数增多,估计位置与实际位置的差别越来越大。图中的小人只朝一个方向移动,是一维的。根据此方法推广到三维,就是惯性测量单元的原理。
学术上的语言是:以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度、偏航角和位置等信息。
2.GPS+IMU
在无人驾驶系统中,GPS的更新频率一般为10Hz,IMU的更新频率一般为100Hz。
两个传感器共同工作时,可以给出频率100Hz的定位输出。下图是两传感器数据融合的原理图:
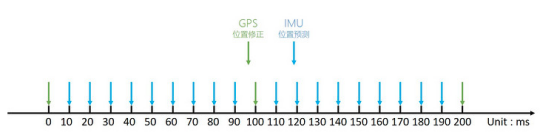
跑在控制器上的软件对信息的处理流程在时间维度上类似下图。在0~100ms的周期中,使用IMU进行9次位置的估计,待新的GPS定位数据进来时,则进行修正,以此实现高频率的定位结果输出。
二、IMU信息采集
1.xsense_driver

提示
[ERROR] [1551165884.109790]: Fatal: could not find proper MT device
运行命令:
sudo chmod 777 /dev/ttyUSB0 //给串口赋权限,USB转串口的赋权限命令
实在不行USB口重新插拔几次,至少我是这么做的。
2.rostopic list

3.rostopic


imu数据类型:
消息头/四元数/四元数残差/角速度/角速度残差/线速度/线速度残差
4.四元数转欧拉角
imu输出信息中没有欧拉角,为了方便观察所以写了一端代码,进行四元数转欧拉角。
可以直接采用ROS中四元数转欧拉角的函数
代码如下:
#include "ros/ros.h"
#include "geometry_msgs/Vector3.h"
#include "sensor_msgs/Imu.h"
#include "geometry_msgs/Quaternion.h"
#include "tf/transform_datatypes.h"
ros::Publisher rpy_publisher;
ros::Subscriber quat_subscriber;
void MsgCallback(const sensor_msgs::Imu msg)
{
tf::Quaternion quat;
quat = tf::Quaternion(msg.orientation.x,msg.orientation.y,msg.orientation.z,msg.orientation.w);
// the tf::Quaternion has a method to acess roll pitch and yaw
double roll, pitch, yaw;
tf::Matrix3x3(quat).getRPY(roll, pitch, yaw);
// the found angles are written in a geometry_msgs::Vector3
geometry_msgs::Vector3 rpy;
rpy.x = roll;
rpy.y = pitch;
rpy.z = yaw;
// this Vector is then published:
rpy_publisher.publish(rpy);
ROS_INFO("published rpy angles: roll=%f pitch=%f yaw=%f", rpy.x, rpy.y, rpy.z);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "talker");
ros::NodeHandle n;
rpy_publisher = n.advertise<geometry_msgs::Vector3>("rpy_angles", 1000);
quat_subscriber = n.subscribe("/imu/data", 1000, MsgCallback);
ROS_INFO("waiting for quaternion");
ros::spin();
return 0;
}
转欧拉角数据如下:

4.运行rqt
由于在平面上进行旋转,所以只有绕Z轴的数据变化,其余两个轴都为零。

5.运行rviz
需要加载:rviz_imu_plugin
这是一个显示sensor_msgs::Imu 消息的rviz插件
通过rviz可以显示此时的位姿,但是不能观察到位移的变化
总结
这是第一篇博客,学习的过程可能也需要多多总结,以后这就作为一个总结的地方吧!
边栏推荐
- [wechat applet] 4 Introduction to wechat developer tools
- 结构体示例
- C语言打开中文路径文件
- Getting started with webdriver
- MAT的安装和使用
- ADB control installation simulator
- Crawler problem set (I) record
- 函数递归示例
- Solution to the new database prompt on the pagoda panel that the database name cannot be greater than 16 bits
- JUnit test suite method sorting (method 2 is not easy to use)
猜你喜欢

C escape character
![[wechat applet] 5 Applet structure directory](/img/d6/4796c8b8fe482b261c5a1fbf79ba2b.jpg)
[wechat applet] 5 Applet structure directory

Getting started with webdriver

jenkins相关

JS (II) syntaxerror: cannot use import statement outside a module

NETCORE combined with cap event bus to realize distributed transaction -- Introduction (1)

Easygui query the company name in the document

数据的收集

JUnit test suite method sorting (method 2 is not easy to use)

【LDA】基础知识笔记——主要是AE、VAE
随机推荐
[wechat applet] 2 Environmental preparation
安装PS软件时提示程序无法访问关键文件/目录,错误代码:41的解决方法
JD scanning code to obtain cookies
【LocalDate LocalTime LocalDateTime】1. Using immutability to achieve thread safety 2 Current date, current time, current date time 3 Since the time zone is not considered, you need to add 8 hours to th
[writeup]buu SQL course1[entry level]
安凯微电子冲刺科创板:年营收5亿 小米产业基金是股东
Data collection
[wechat applet] 4 Introduction to wechat developer tools
Common assertions in JUnit testing
ADB command (I) record
【Optional】1. Map and ifpresent 2 Ofnullable and orelse
Junit多线程的写法
Autofac浅学(2)
Autofac初学(1)
Chapter I exercises of program construction and interpretation
C string
[wp][beginner level] attack and defense world game
【LDA】基础知识笔记——主要是AE、VAE
MH32F103ARPT6软硬件兼容替代STM32F103RCT6
野指针理解