当前位置:网站首页>[AUTOSAR candrive 2. understand the mapping relationship between communication HOH, canid and pduid]
[AUTOSAR candrive 2. understand the mapping relationship between communication HOH, canid and pduid]
2022-07-23 12:27:00 【Rest of life】
CAN The original intention of interface module design is not to directly access the hardware , Independent of hardware , That means CAN The interface layer can only pass CAN Module interface to obtain hardware related content , Mainly used CAN Module interface has Hth and Hrh. About Hth and Hrh, First, it involves a software filtering selection problem , When Hth and Hrh configure BasicCAN, You need to in CanIf The module performs software filtering ; When Hrh and Hth configure FullCAN, You don't need to be in CanIf The module performs software filtering , But in hardware filtering . Then go to the above mentioned CanId How to map , Namely different CanId How to map to Hrh and Hth, as well as Hrh and Hth And how to map to higher-level modules ( Temporarily called PDU Id), Here's the picture 13 Shown 
chart 13 PDU Ids and Hoh Mapping , To quote [1]
In general, the above figure clearly shows various Id Mapping , But to better understand , Here is a detailed introduction :
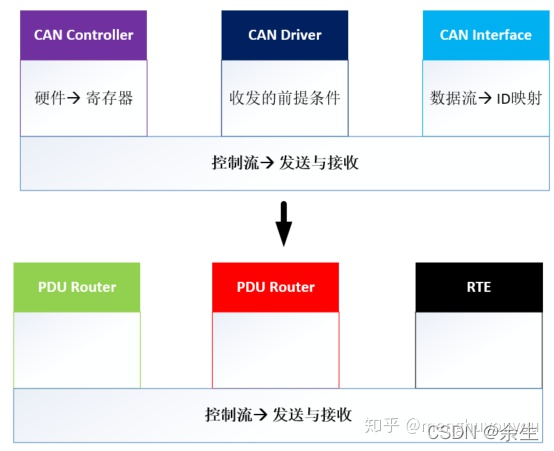
First , We know CAN Controller There are many hardware object processors in (Hoh), stay CAN Driver Lieutenant general Hoh For receiving and sending purposes , What you receive is called Hrh, It is called Hth. And then Hrh and Hoh Respectively with the corresponding CanId It maps , Here's the picture 14 Shown .

chart 14 Hoh–(Hrh, Hth)-- CanId Mapping diagram
And then define CAN Module and CAN Interface module Hrh and Hth Mapping , Here's the picture 15

chart 15 (Hrh–CanIf Hrh), (Hth–CanIf Hth)
Finally establish CanIf Hrh And RxPduID,CanIf Hth And TxPduID Mapping , Pictured 16, That is for CAN Communication function , Set up CAN Interface module and PduR Modular ID mapping .

chart 16 (CanIf Hrh–RxPdu ID), (CanIf Hth–TxPdu ID)
After establishing the above mappings , It is very easy to understand the parameter relationship of related functions of different modules ( such as indication Functions and confirmation function ). To receive indication Function description , Here's the picture 17 Shown .

chart 17
namely CAN The module reads the data of the relevant register , Which establishes CanId And Hrh Mapping 1, And both are Mailbox The elements of ; The data length and data are PduInfoPtr The elements of . Pass this information to the upper layer CAN Interface module ,CAN The interface module is established according to Hrh And CanIf Hrh Mapping acquisition of CanIf Hrh,CanIf Hrh According to the established CanIf Hrh And RxPduId Mapping 2 obtain RxPduId. Last , take RxPduId and CAN The data transmitted by the module is passed to PduR modular . It's not difficult to find through this process , If known RxPduId, Then we know the corresponding CanId How much is the , vice versa .
If ever AUTOSAR Tool configuration experience , It is not difficult to find that the configuration process generally establishes various mapping relationships according to this logic , And during configuration Id Pay special attention to settings , Must correspond correctly , To ensure the correct function .
Through these two articles CAN Module and CAN Introduction of interface module , Basically straightened out the process of data transmission and software implementation from hardware to software , Here's the picture 18 The first half . That is, the software has obtained the corresponding CanId Of 8 Bytes of data , Then the next natural thing to do is to receive this 8 Byte data is parsed into various signals defined by the corresponding message protocol , Or package the transmitted signal into 8 Bytes of data . Start with the next article to introduce the figure 18 The second half of .
Link:
AUTOSAR in CAN Communication protocol stack configuration details
be based on Autosar Of Can Principle of communication protocol stack
边栏推荐
- Hard disk partition of obsessive-compulsive disorder
- Connaissance du matériel 1 - schéma et type d'interface (basé sur le tutoriel vidéo complet de l'exploitation du matériel de baiman)
- 使用PyOD来进行异常值检测
- 2021 TOP10 development trend of information science. Deep learning? Convolutional neural network?
- G2o installation path record -- for uninstallation
- Opencv library installation path (don't open this)
- 【Autosar CP通用 1.如何阅读Autosar官方文档】
- Interpretation of the paper: recognition of enhancer promoter interactions with neural networks based on pre trained DNA vectors and attention mechanisms
- 时间序列的数据分析(一):主要成分
- 单片机学习笔记3--单片机结构和最小系统(基于百问网STM32F103系列教程)
猜你喜欢

论文解读:《提高N7-甲基鸟苷(m7G)位点预测性能的迭代特征表示方法》

How can knowledge map, map data platform and map technology help the rapid development of retail industry

Green data center: comprehensive analysis of air-cooled GPU server and water-cooled GPU server

How to build a liquid cooling data center is supported by blue ocean brain liquid cooling technology

利用google or-tools 求解数独难题

Deep convolution generation countermeasure network

Interpretation of the paper: DNA enhancer sequence recognition transformer structure based on Bert and two-dimensional convolutional neural network
把LVGL所有控件整合到一个工程中展示(LVGL6.0版本)

【AUTOSAR CanDrive 1.学习CanDrive的功能和结构】

利用or-tools来求解路径规划问题(TSP)
随机推荐
Importance of data analysis
谈谈转动惯量
Interpretation of the paper: "deep-4mcw2v: sequence based predictor for identifying N4 methylcytosine (4mc) sites in E. coli"
K-nucleotide frequencies (KNF) or k-mer frequencies
How to build a liquid cooling data center is supported by blue ocean brain liquid cooling technology
Matplotlib Usage Summary
利用or-tools来求解路径规划问题(VRP)
怎么建立数据分析思维
利用pycaret:低代码,自动化机器学习框架解决分类问题
时间序列的数据分析(二):数据趋势的计算
Installation and use of APP automated testing tool appium
Lvgl8.1 version notes
【存储器了解 RAM flash和eeprom存储器的区别和作用】
CPC client installation tutorial
【AUTOSAR DCM 1.模块简介(DSL,DSD,DSP)】
高电压技术重点知识整理
硬件知识1--原理图和接口类型(基于百问网硬件操作大全视频教程)
论文解读:《一种利用二核苷酸One-hot编码器识别水稻基因组中N6甲基腺嘌呤位点的卷积神经网络》
How to establish data analysis thinking
利用or-tools来求解带容量限制的路径规划问题(CVRP)