当前位置:网站首页>ROS通信模块:秒懂话题通信
ROS通信模块:秒懂话题通信
2022-08-03 01:53:00 【阿巴according】
目录
ROS中每个功能点都是单独的进程,每个进程都是独立运行的,也需要进行数据之间的通信。
ROS中的基本通信机制主要有如下三种实现策略
话题通信(发布订阅模式)例子: 我们在抖音上关注某些内容,抖音就会给我们推送这些内容
话题通信
雷达(发布:数据给导航)
导航(订阅数据:获得雷达的数据进行计算 || 发布:计算数据后得到的指令)
底盘(订阅:获得导航的指令进行运动)
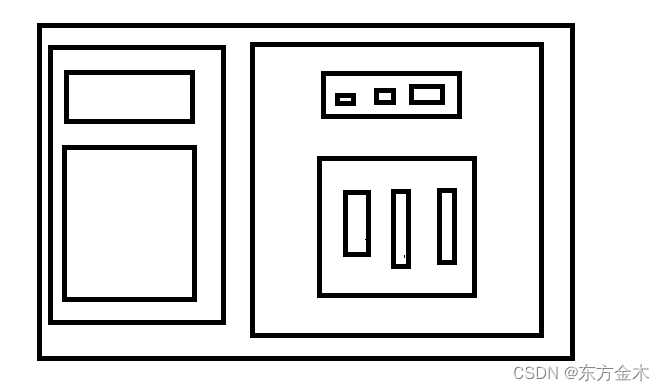
话题通信图解
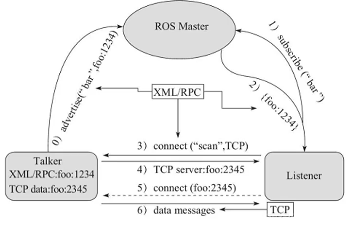
ROS Maste----Talker----Listener的关系可以关系映射为 媒婆----男方----女方
0)男方向媒婆提交个人信息 话题(房)---手机号【RPC】
1)女方向媒婆提交个人信息 话题(房)
2)媒婆把男方的手机号【RPC】给女方
3)女方打电话给男方
4)男方响应(加个微信【TCP】)
5)女方加男方微信
6)发布消息
话题通信注意点:
1、使用的协议由RPC和TCP;
2、步骤0)和1)没有先后关系;
3、Talker(话题发布者)和Listener(话题订阅者)都可以存在多个;
4、Talker(话题发布者)和Listener(话题订阅者)建立连接后,master可以关闭了;
5、上述实现流程已经封装了,以后直接调用即可;
话题通信应用时的关注点:
0.其他大部分实现已经被封存了
1.话题设置需要关注
2.发布者实现需要关注
3.订阅者实现需要关注
4.信息载体需要关注
其他通信策略,见后面文章
服务通信(请求响应模式)例子:在CSDN里面搜索某些东西,CSDN就会给我们反馈内容
参数服务器(参数共享模式)例子:一个数据包,每个节点都可以从里面获取数据,修改数据等操作
边栏推荐
猜你喜欢

随机推荐
软件定义网络实验之自定义拓扑开发
visual studio 2012 为啥这么优秀
”QSqlDatabasePrivate::removeDatabase: connection ‘test-connect‘ is still in use“数据库多次打开报错
【7.31】代码源 - 【矩阵操作】【宝箱】【New Stone Game】【等差数列】
如何备考PMP才能一次通过?
7-Redis工具类
代码工具推荐
粘包与拆包
PHICOMM(斐讯)N1盒子 - recovery模式救砖卡登录页LOGO卡1%卡4%卡26%
[Example构造方法增加notNull参数,默认false,允许值为null,值为null的时候不加入到条件中
OpenWRT设置ipv6网络
新库上线 | CnOpenDataA股上市公司董监高信息数据
力扣第二周错题集
爆款视频怎么做?这里或许有答案
关于提高企业网络安全意识
常用工具链和虚拟环境-WSL
[@property enhancement in Objective-C language]
VS2010 组件列表与对应名称
Conversational Technology!
8-jwt工具类